自动控制原理试题解析:重庆邮电大学期末考试
版权申诉
"重庆邮电大学的自动控制原理课程历年期末试卷及答案,涵盖了控制器相关的知识点,包括系统分析、稳定性判断、误差分析等核心概念。"
这篇资料详细介绍了自动控制原理的一些基本概念和理论,主要涉及以下几个方面:
1. **传递函数**:是控制系统理论中的基础概念,通过对微分方程进行拉普拉斯变换,可以将时间域的微分方程转换为s域的代数方程,进而得到输入和输出之间的关系。在计算传递函数时,必须满足零初始条件。
2. **系统稳定性**:对于二阶系统,阻尼比是判断稳定性的关键参数。当阻尼比大于1时,系统为过阻尼;0小于阻尼比小于1时,系统为欠阻尼;而阻尼比等于0则表示无阻尼振荡。
3. **开环放大系数K和系统稳态误差**:K的减小会导致有定值误差系统的稳态误差增大,而系统参数v的降低意味着系统能跟踪的输入信号阶数降低,可能增加稳态误差。
4. **香农采样定理**:这是数字信号处理中的重要定理,指出为了不失真地恢复连续信号,采样频率必须大于信号最高频率的两倍,即采样频率应大于2倍奈奎斯特定理。
5. **脉冲传递函数**:在零初始条件下,脉冲传递函数定义为系统输出变量的Z变换与输入变量的Z变换之比,用于分析离散时间系统的动态特性。
接下来,题目还包含了判断正误的部分,涉及了系统的动态性能、稳定性、根轨迹分析、控制器设计等方面的知识点:
6. **系统超调与阻尼比的关系**:减小阻尼比通常会增加超调,这道题目的表述是错误的。
7. **系统稳态误差与稳定性**:如果一个系统的稳态误差为无穷大,表明系统不能达到稳态,因此系统可能是不稳定的,这个观点是正确的。
8. **根轨迹与开环增益K**:根轨迹上的点确实代表了系统在该点处的开环增益K的大小,这道题目的表述是正确的。
9. **比例微分控制与系统型**:比例微分控制器会引入微分环节,提高系统的稳定性,但不会降低系统类型,因此这道题目的表述是错误的。
10. **系统闭环极点与稳定性**:系统闭环极点离虚轴越近,系统越不稳定,这道题目的表述是错误的。
11. **参量根轨迹方程**:对于给定的传递函数,其参量根轨迹方程的表述是正确的。
12. **电机控制系统输入信号**:如果控制目的是稳定电机转速,输入信号通常是设定转速,而不是速度随时间变化的信号,这道题目的表述是错误的。
13. **特征根与系统响应速度**:具有更负实部的特征根对应更快的响应,所以B系统的时域响应比A快,这道题目的表述是正确的。
14. **系统极坐标**:未提供完整的信息,但通常来说,更负的极点对应更好的瞬态性能。
这些题目反映了自动控制原理课程中的重点内容,包括系统分析、设计和优化,以及稳定性判断,对于理解和掌握自动控制系统的基本原理至关重要。
5、非最小相位系统是不稳定的。 ( ×)
( × )
到-90 度的半圆曲线后才能够准确判断。( × )
N(A)与 G(jw)是串联形式。
√ )
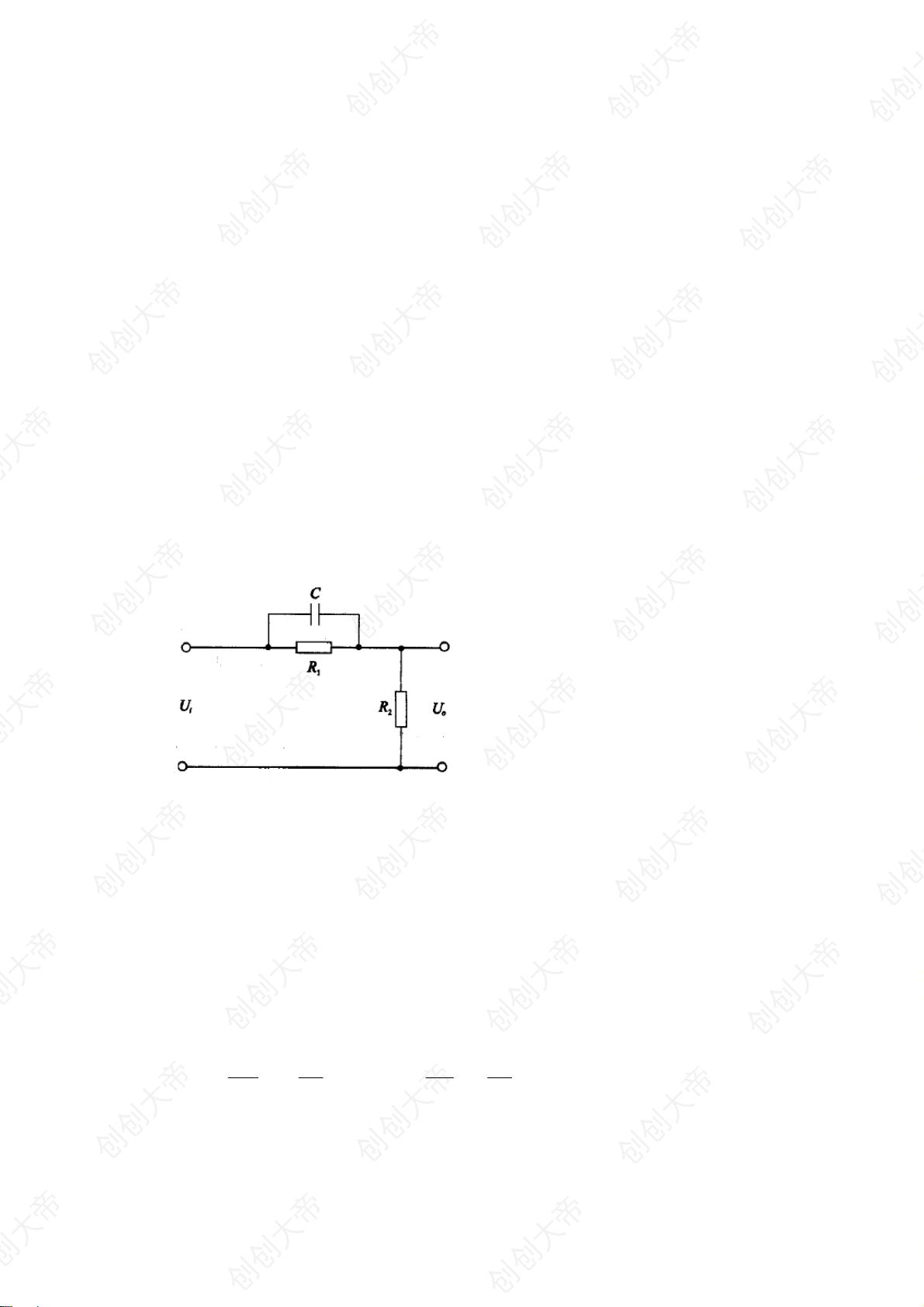
1、(10 分)无源网络电路如下图 1 所示,电容 C=1F,电阻 R1=R2=1Ώ,输
入信号为 U
i
,输出信号为 U
o
,求系统的传递函数。
6、某一系统对于阶跃信号的稳态误差为 0,则其跟踪速度信号 r(t)=t 的稳
态误差也为 0。
7、串联超前校正适用条件为:校正后的系统剪切频率小于校正前系统的剪切
频率。 ( × )
8、II 型系统使用奈奎斯特判据时,需要在极坐标图上补充半径为无穷大,
相角从+90 度
9、系统波特图上的频率特性,低频段的斜率主要由一阶惯性与比例环节决定。
( × )
10、描述函数法分析系统的条件是非线性环节
(
三、计算题。(本大题共 3 小题,共 30 分)
解:电压平衡方程:
(2 分) 得:
1
/
/
1
Rui
dtduCi
uuu
cR
cc
coi
2*]1/)(/)([
21
RRuudtuuCd
oioiRco
*)( Riiu (2 分)
整理后得到:
io
RdtR 11
2
io
uCCRuC
dt
CR )1(
2
(2 分)
代入参数值计算得到最后的微分方程:
R
du
R
du
22
自动控制原理试卷第 9 页(共××页)
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
剩余49页未读,继续阅读
2021-06-17 上传


创创大帝(水印很浅-下载的文档)
- 粉丝: 2409
- 资源: 5272
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
