五轴工业机器人控制系统设计与优化
版权申诉
82 浏览量
更新于2024-06-21
收藏 2.01MB DOCX 举报
"五轴工业机器人控制系统设计(苏校池)(2).docx"
本文主要探讨了五轴工业机器人的控制系统设计,这是实现机器人智能化和人工化的核心环节。五轴工业机器人在工业自动化领域有着广泛的应用,但由于技术背景,中国的五轴机器人技术相比发达国家仍存在一定的差距,依赖于外部的技术和组件。
一、五轴工业机器人整体结构设计
五轴工业机器人由多个关节构成,能够实现复杂的空间运动轨迹。这种设计允许机器人在三维空间中灵活地移动工件或执行任务,适用于精密装配、焊接、喷涂等高精度作业。
二、控制系统硬件设计
控制系统硬件是机器人运行的基础,包括处理器、驱动器、传感器等关键部件。设计时需考虑硬件的实时性、稳定性及处理能力。处理器选型应满足高速运算需求,驱动器需与电机匹配,提供精确的扭矩控制,而传感器则用于获取机器人的实时状态信息。
三、软件选择与程序编写
软件部分主要包括控制算法的实现、人机交互界面的设计和故障诊断系统。选择合适的编程语言(如C++、Python或MATLAB)进行程序编写,实现机器人的运动控制、路径规划和故障处理等功能。同时,友好的人机界面能提高操作者的使用体验和工作效率。
四、运动轨迹规划
五轴机器人的运动轨迹规划是确保其高效、安全作业的关键。通过优化算法,可以计算出从起点到终点的最优路径,避免碰撞并减少非生产性动作时间。
五、伺服控制系统的电机选择
伺服电机是控制系统的执行元件,其性能直接影响机器人的精度和速度。根据负载特性、速度要求和扭矩需求,选择合适的伺服电机,并进行参数调整以达到最佳性能。
六、运作位置设计
运作位置设计涉及到机器人的工作范围和可达性。通过对工作区域的分析,设定合理的关节角度和位置限制,确保机器人能在安全的范围内完成各种任务。
五轴工业机器人控制系统的设计是一项综合性的工程,需要考虑机械、电子、控制等多个领域的知识。通过精心设计的控制系统,可以提升五轴机器人的工作效率、精度和可靠性,进一步推动中国在工业自动化领域的技术水平。
9
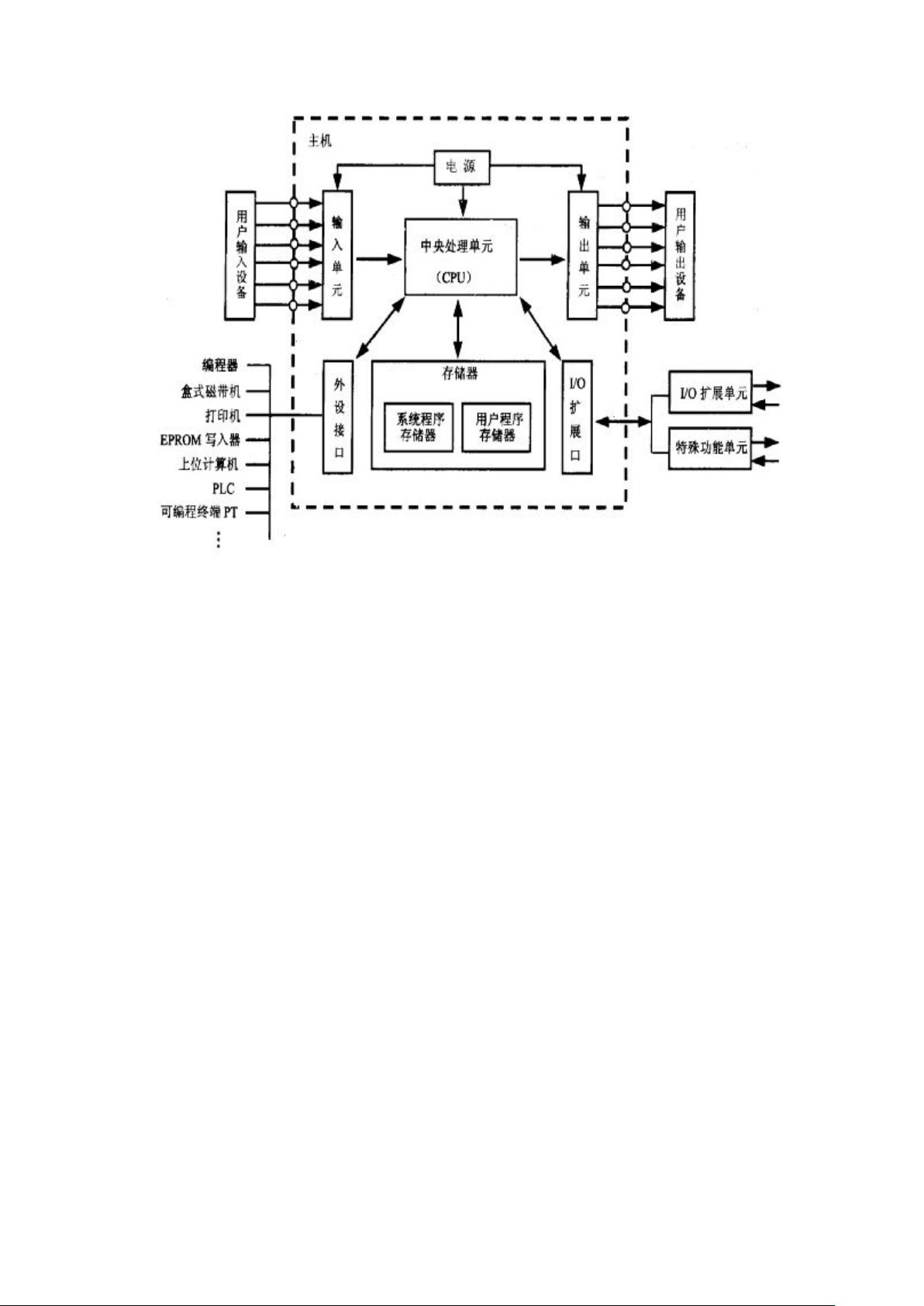
图 3-2 硬件控制系统组成部分
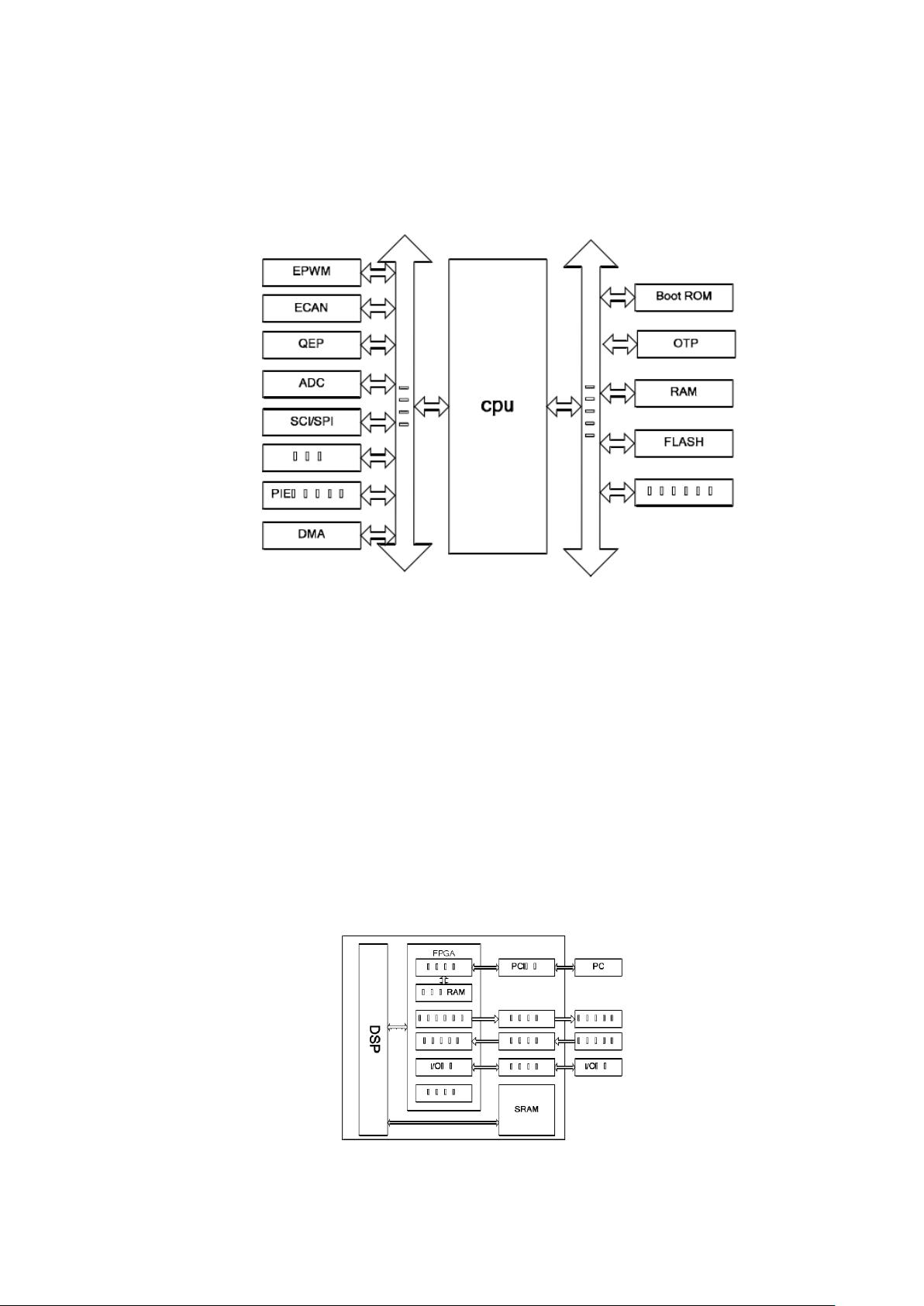
3.2.2 硬件控制系统的内部选择
由于硬件控制系统对运算能力要求很高且如采用单个 CPU 的机构无法满足
对硬件接口的要求,故选用 DSP 处理器作为控制器核心芯片来完成实时性控制,
FPGA 双 CPU 构架作为伺服核心处理器。从而构成 PC 机加专用运动控制器的系统。
并且硬件系统要求控制系统中运动控制芯片具有很高的运算能力,通讯方式的实
时性高且可以互换庞大的数据。CPU 则需要具备多任务处理的能力。
1)硬件接口资源的选择:
PWM 驱动信号(5 路),正交反馈信号接口(5 路),(5 个)限位和编码器
零点信号捕获接口(5 个)以及若干抱闸信号,并根据要求增加传感器和输入输
出接口。
2)DSP 控制芯片类型的选择:
要考虑的因素有: 处理芯片的速度、其功率的小号耗、程序存储器的性能、
数据存储器容量、芯片内部的资源、精度、寻址空间、成本、实现方便性以及内
部部件。
由 于 考 虑 到 以 上 因 素 固 选 用 TI 公 司 的 浮 点 型 数 字 信 号 处 理 芯 片
TMS320F2812 作为总控制芯片。相比于 AT89 这类型片,TMS320F2812 作为总控制

剩余75页未读,继续阅读
2023-09-09 上传
2022-11-30 上传
2022-05-27 上传
2022-07-07 上传
2024-03-31 上传
2022-11-05 上传

南抖北快东卫
- 粉丝: 83
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
