伺服操作指南:原点回归与故障复位
需积分: 9 153 浏览量
更新于2024-07-25
收藏 685KB PDF 举报
"这篇资料主要涉及伺服系统的常见问题和解决方法,包括原点回归的程序示例、JOGSPEED的更改以及SERVOERROR的复位指令。"
1. **原点回归程序**:原点回归是伺服系统中的重要操作,确保设备能够准确回到起始位置。在示例中,原点回归启动通过M1250指令,接着Y50定位启动伺服参数,Y44设置轴停止,Y40表示PLC准备完成。电机手动状态由M1081设定,原点回归启动条件输出脉冲由M6401控制。专用指令[T0H4K1500K9001K1]中,T0与QD75配合用于PLC到伺服驱动器的通信,H4是QD75模块的地址,K1500是定位指令,K9001指示机械原点回归,K1设定值用于执行。在回归过程中,Y50表示动作进行中,X50表示启动完成,X4C表示电机忙状态,M6501则是在原点回归完成后的输出。
2. **原点回归过程**:原点回归过程中,指示灯会以0.5秒间隔闪烁,Y50和X50分别表示回归动作进行和完成,X4C表示电机忙。完成后的断开条件包括SERVOERROR(M6701)、报警输出(X48)或电机M/C电源断开(YA42)。电机完成回归后,需执行RSTY50复位,并通过M1251指示原点回归状态。
3. **全部原点回归程序**:M1290启动原点回归,M1001确保在手动状态下进行,M100输出回归信号。断开条件有M101全部回归完成、复位按键启动(M1012)或紧急停止(M105)。原点回归完成后,所有电机的原点完成输出。
4. **JOGSPEED更改**:JOGSPEED是伺服运行时的移动速度,可通过M1055、M1053和M1051三个按键开关选择高速、中速或低速。SM400保持接通允许随时改变速度,D120存储速度值,通过DMOV和DTO指令将D32的数据(任意设定的速度值)写入H4K1518以调整JOG速度。
5. **SERVOERROR复位**:当发生SERVOERROR时,可使用K1502、K1602、K1702、K1802等专用指令对不同轴进行错误复位。这些代码对应于特定轴的错误状态,通过执行相关指令可以清除错误并恢复伺服系统的正常运行。
总结,本资料提供了伺服系统在原点回归、速度调节和错误处理方面的详细步骤和指令,对于理解和解决伺服使用中的常见问题具有实用价值。
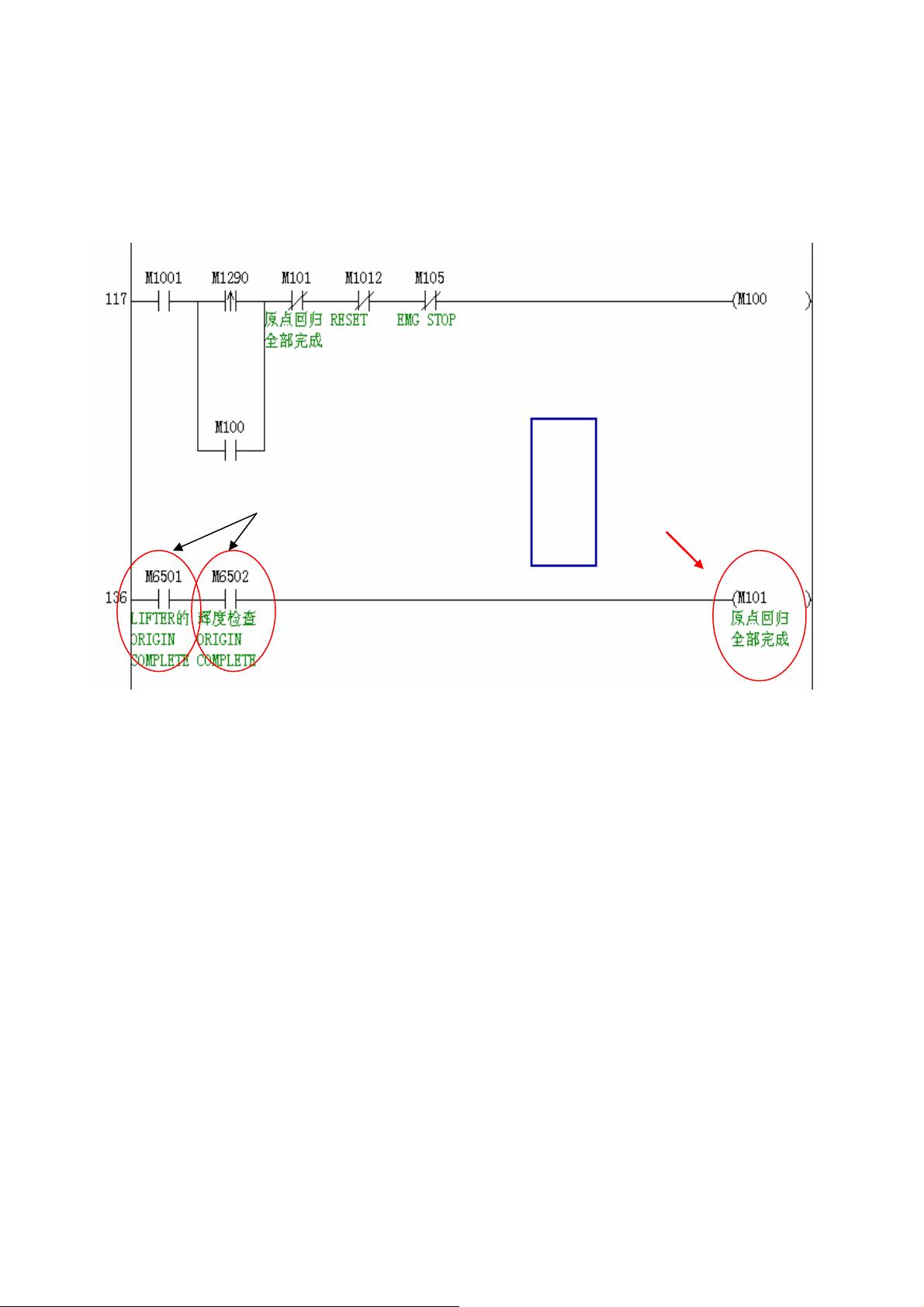
3.全部原点回归程序示例:
M1290 原点回归的启动开关
M1001 原点回归时必须在手动状态下进行
M100 原点回归的输出 (动作需要进行维持处理)
原点回归的断开条件:
M101 全部原点回归执行完成
M1012 复位按键启动
M105 紧急停止开关启动
原点回归完成
状态指示
所有电机
原点完成输出
剩余16页未读,继续阅读
2017-09-12 上传
2009-04-20 上传
2018-07-14 上传
2024-10-12 上传
2020-07-19 上传

manrong
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
