激光测距仪在复杂环境中移动机器人定位的研究
需积分: 10 167 浏览量
更新于2024-09-10
收藏 5.25MB PDF 举报
"本文主要探讨了使用激光测距仪(Laser Range Finder, LRF)对移动机器人进行定位的问题,并指出在透明或反射物体(如玻璃墙或镜子)环境中,LRF定位面临的挑战及可能产生的测量误差。"
移动机器人的定位是自动化任务中的关键组成部分,确保机器人能够准确地知道自己在环境中的位置。激光测距仪,作为一种高精度、可靠的传感器,广泛应用于机器人定位。它通过发射激光束并分析返回的时间和角度来确定目标的距离和方向,从而帮助机器人构建周围环境的地图。
然而,当LRF在有透明或反射物体的环境中工作时,会出现一系列问题。例如,玻璃墙可以引起散射反射、镜面反射以及激光的穿透,这些现象都会导致测距数据的不准确。散射反射可能导致激光信号的随机分布,使得机器人难以识别物体的实际位置。镜面反射则会使激光束直接反弹回来,使机器人误认为目标就在反射的位置。更复杂的是,如果激光穿透了透明物体,比如玻璃,那么测量到的距离将无法反映实际的障碍物距离。
针对这些问题,研究者们提出了一系列解决方案。一种方法是采用滤波算法,例如卡尔曼滤波器(Kalman Filter),结合其他传感器数据(如惯性测量单元IMU)进行数据融合,减少LRF的测量误差。另一种方法是利用计算机视觉技术,对反射和透明物体进行特殊处理,通过图像分析来辅助激光测距数据的校正。
此外,机器学习也逐渐被引入到LRF的误差修正中。通过训练模型学习不同类型的反射和穿透模式,机器人可以更准确地识别和适应这些特殊情况。同时,对于特定环境,还可以建立预先的环境模型,以便在实际操作中对比LRF的测量结果,提高定位的准确性。
尽管LRF在透明或反射物体环境中的定位存在挑战,但通过持续的技术创新和算法优化,这些难题正在逐步得到解决。未来的研究将进一步探索如何在更复杂的环境中实现高精度、鲁棒的移动机器人定位,以推动机器人技术在工业、服务等领域的广泛应用。
0278-0046 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2016.2523460, IEEE
Transactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
3
III. L
OCALIZATION IN GLASS-WALLED ENVIRONMENTS
A. Case classification by reflective characteristics
Suppose that
,
is a scalar range measured by the ith scan of
the LRF at time . Our approach assumes that
,
is measured
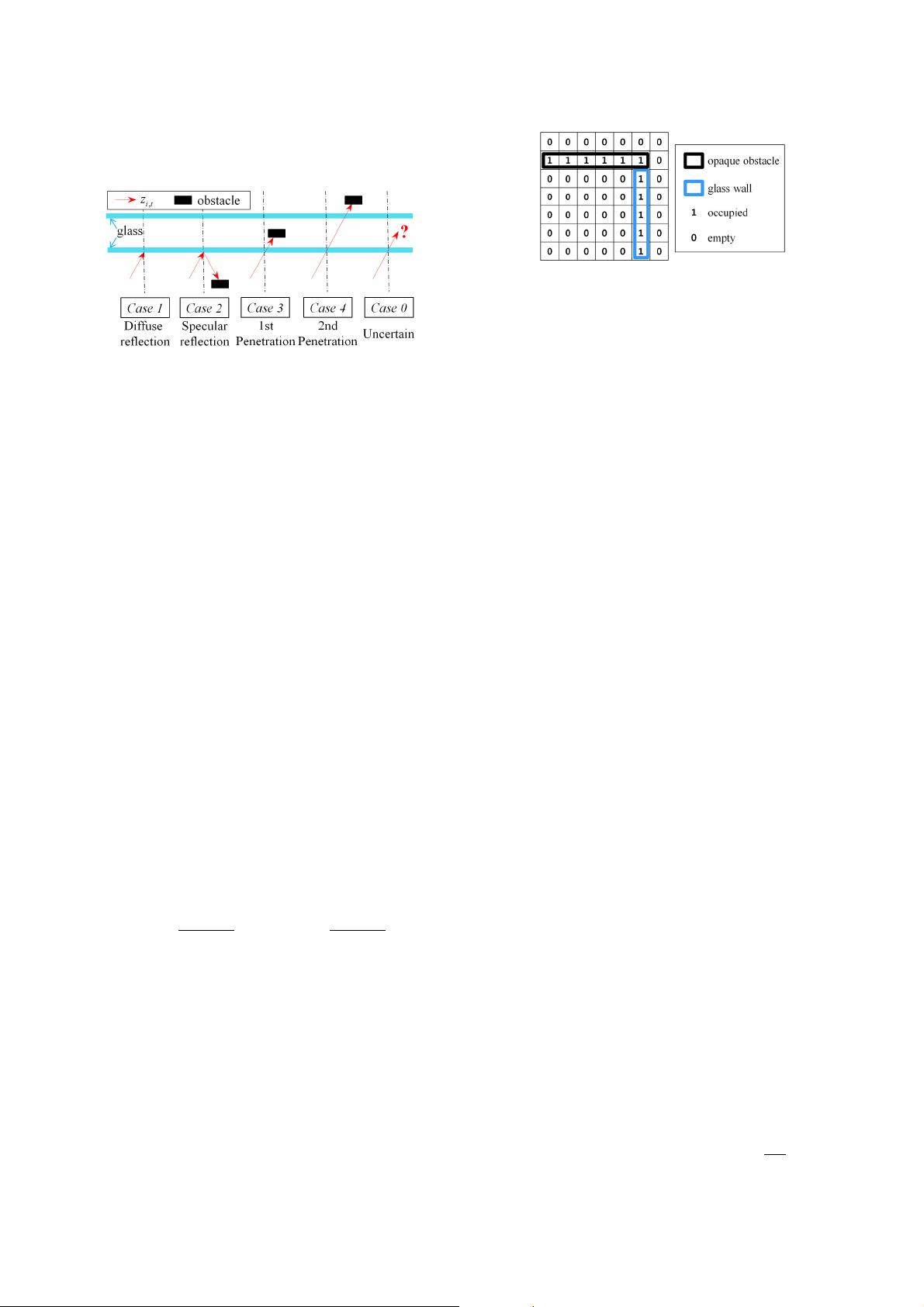
as a consequence of one out of the five cases shown in Fig. 2.
Case 1 and Case 2 are defined as diffuse reflection and specular
reflection, respectively. Meanwhile,
,
may include the range
measurements under multiple penetrations. Case 3 and Case 4
are the first and second penetration, respectively. In this paper,
it is assumed that the maximum number of penetrations is two
for simplicity. The number of penetrations is dependent on the
number of glass walls. Case 0 indicates the uncertain reflection.
Case 0 can be caused by unknown obstacles or unpredictable
reflections. Therefore, five cases can be defined as shown in
Fig. 2. Let
,
be the case which is causative of
,
.
,
is
defined as the following equation:
,
∈
1,2,3,4,0
(1)
In the proposed method,
,
is estimated by comparing
,
to the reference distances corresponding to four cases except
for Case 0. The reference distances imply expected range
measurements at a potential pose of a robot. Let
be the
predicted robot pose from the odometry. The reference
distances are calculated on the basis of robot pose
and
occupancy grid map .
,
,
is given by the
following equations:
∆
cos
,
∆
sin
, (2)
∆
∆
,
∆
,
, ∆
tan
∆
,
∆
,
, (3)
∆
(4)
where ∆
,
and ∆
,
correspond to the incremental linear
displacement of the left and right wheel, respectively; is the
wheelbase; and
,
,
is the estimated robot
pose at time 1. In (2)–(4), it is assumed that the robot is a
two-wheeled differential drive mobile robot.
In grid map , glass walls are represented as occupied
regions. In other words, the glass wall and the opaque obstacle
are not distinguished as shown in Fig. 3. This is natural because
multiple diffuse reflections take place on glass surfaces when
the robot moves around the glass-walled environment. This fact
implies that the user does not have to make an effort in order to
specify glass wall regions in the grid map. The users are
required to modify the grid map only when the glass walls are
modeled as the empty space. In such a case, the corresponding
cells should be replaced by occupied cells.
The proposed localization scheme is carefully designed by
adding the case estimation of the range measurements. The
following two assumptions are made in order to overcome
difficulties caused by a glass wall.
(i) The local tracking localization is successfully carried out
with low uncertainties.
(ii) For localization purposes, it is sufficient enough to exploit
only a part of the range measurements.
Assumption (i) is required because simultaneous
consideration of high pose uncertainty and estimation of
reflective characteristics is extremely difficult. Assumption (ii)
is commonly accepted because noisy or occluded
measurements will not be considered for localization in
general.
In order to observe environmental geometries around
predicted robot pose
with low uncertainty, preliminary
samples are extracted through systematic sampling. In our
approach, preliminary samples correspond to the voters for the
estimation of
,
. Predicted robot pose
is not an accurate
robot pose. Thus, if
,
is estimated on the basis of
only, the
incorrect case estimation may occur. For this reason,
preliminary samples are extracted around
. Voting is then
carried out by each preliminary sample. The case of the highest
vote will be considered as
,
for each range measurement. A
more detailed scheme can be explained by the following four
steps.
1) Extraction of preliminary samples: Let be the number
of preliminary samples. In order to extract preliminary
samples, we use systematic sampling at regular angular
intervals around
. The pose
,
,
of the nth
preliminary sample is extracted by the following equations:
,
,
(5)
Fig. 2. Five cases by reflective characteristics. The thick light blue lines
represent the glass wall. The thin red lines represent the LRF measurements.
The black blocks represent opaque obstacles.
Fig. 3. Illustration of grid mapping. In grid map , opaque obstacles are
represented as occupied regions. Similarly, glass walls are represented as
occupied regions.
剩余11页未读,继续阅读
2021-09-08 上传
2021-02-09 上传
2010-04-07 上传
2018-02-23 上传
2021-02-10 上传
2021-02-07 上传
2021-02-09 上传
2021-09-17 上传

slytton
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
