SPLATNet:高效稀疏格网处理点云的深度学习架构
需积分: 9 68 浏览量
更新于2024-09-07
收藏 8.9MB PDF 举报
SPLATNet(Sparse Lattice Networks for Point Cloud Processing)是一项在2018年计算机视觉与模式识别(CVPR)会议上发表的研究成果,针对激光雷达点云数据的深度学习处理方法。该论文的作者包括Hang Su、Varun Jampani(均来自UMass Amherst)、Deqing Sun和Subhransu Maji(均来自NVIDIA),以及Evangelos Kalogerakis和Ming-Hsuan Yang(分别来自UMass Amherst和UC Merced),Jan Kautz来自NVIDIA。SPLATNet的核心创新在于提出了一种网络架构,直接操作高维稀疏格网表示的点云数据。
传统的卷积神经网络(CNN)在处理高维格网上的点云时,会面临内存和计算效率的问题,因为随着格网尺寸的增长,所需的存储空间和计算量呈指数级增长。为解决这个问题,SPLATNet引入了稀疏双边卷积层作为基本构建块。这些稀疏卷积层利用索引结构,只对格网中的占用部分进行运算,显著降低了计算复杂性和内存需求。
稀疏卷积层的另一个关键特性是其灵活性,允许对格网结构进行动态指定,从而支持层次化的特征学习,实现空间感知,并结合2D和3D推理。这种设计使得SPLATNet能够同时处理点基和图像基的表示,而且可以进行端到端的训练,即从输入数据到最终预测结果的全程优化。
SPLATNet在3D分割任务上展示了出色的性能,证明了其在处理大型、密集且复杂的点云数据集时的高效性和准确性。通过使用稀疏格网和稀疏卷积,SPLATNet不仅提高了模型的效率,还促进了点云处理领域的研究,推动了深度学习在实际应用中的广泛应用,如自动驾驶、机器人导航和环境感知等领域。这项工作为后续的研究者提供了一个有效的框架,用于开发更高效、更灵活的点云处理算法。
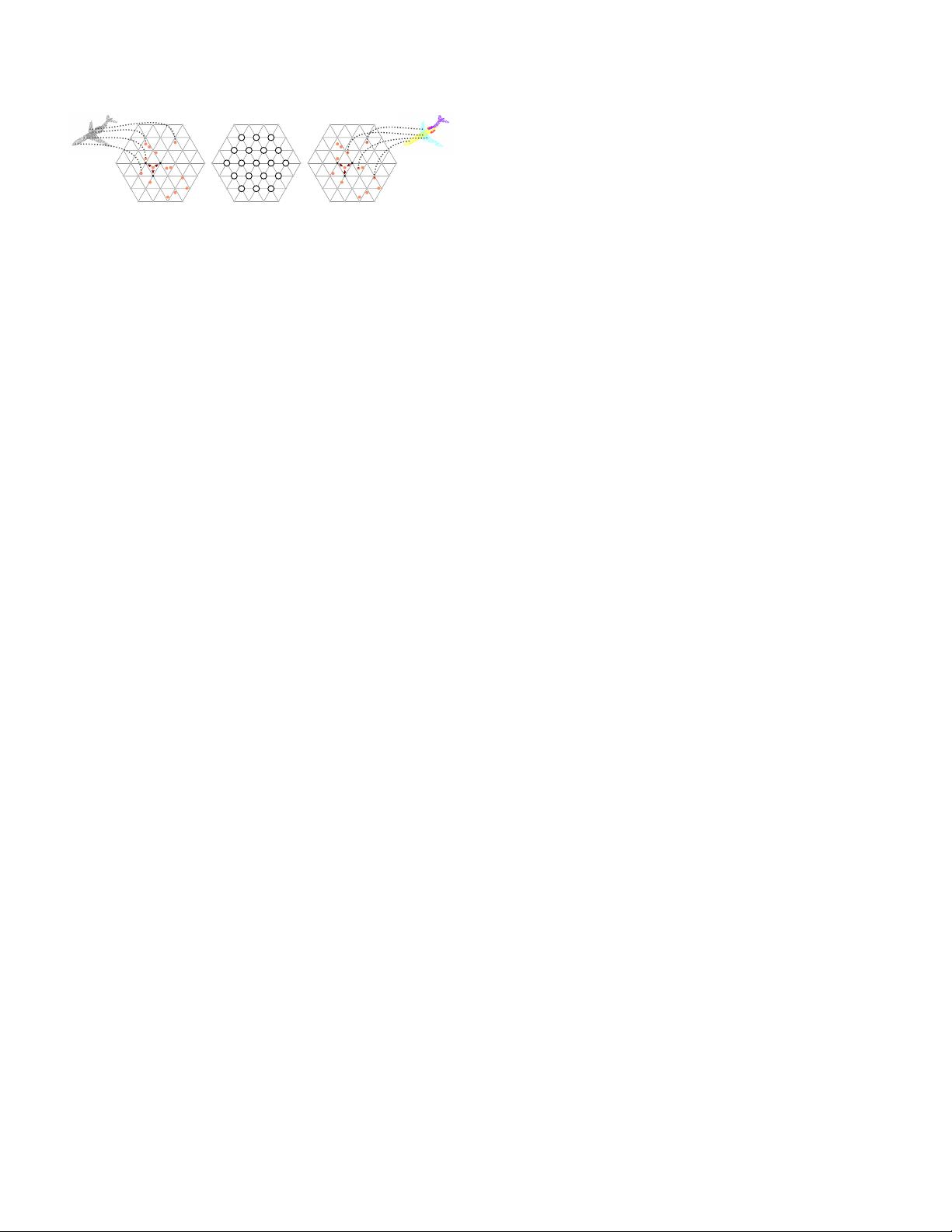
Splat
Input
Convolve
Segmentation
Slice
Figure 2: Bilateral Convolution Layer. Splat: BCL first
interpolates input features F onto a d
l
-dimensional permu-
tohedral lattice defined by the lattice features L at input
points. Convolve: BCL then does d
l
-dimensional convolu-
tion over this sparsely populated lattice. Slice: The filtered
signal is then interpolated back onto the input signal. For
illustration, input and output are shown as point cloud and
the corresponding segmentation labels.
ways be desirable in man-made object segmentation and
classification tasks where large deformations may change
the underlying shape or part functionalities and semantics.
We refer to Bronstein et al. [7] for an excellent review of
spectral, patch- and graph-based methods.
Joint 2D-3D networks. FusionNet [18] combines shape
classification scores from a volumetric and a multi-view
network, yet this fusion happens at a late stage, after the
final fully connected layer of these networks, and does not
jointly consider their intermediate local and global feature
representations. In our case, the 2D and 3D feature repre-
sentations are mapped onto the same lattice, enabling end-
to-end learning from both types of input representations.
3. Bilateral Convolution Layer
In this section, we briefly review the Bilateral Convo-
lution Layer (BCL) that forms the basic building block of
our SPLATNet architecture for point clouds. BCL pro-
vides a way to incorporate sparse high-dimensional filter-
ing inside neural networks. In [22, 25], BCL was proposed
as a learnable generalization of bilateral filtering [43, 2],
hence the name ‘Bilateral Convolution Layer’. Bilateral
filtering involves a projection of a given 2D image into a
higher-dimensional space (e.g., space defined by position
and color) and is traditionally limited to hand-designed fil-
ter kernels. BCL provides a way to learn filter kernels in
high-dimensional spaces for bilateral filtering. BCL is also
shown to be useful for information propagation across video
frames [21]. We observe that BCL has several favorable
properties to filter data that is inherently sparse and high-
dimensional, like point clouds. Here, we briefly describe
how a BCL works and then discuss its properties.
3.1. Inputs to BCL
Let F ∈ R
n×d
f
be the given input features to a BCL,
where n denotes the number of input points and d
f
denotes
the dimensionality of input features at each point. For 3D
point clouds, input features can be low-level features such
as color, position, etc., and can also be high-level features
such as features generated by a neural network.
One of the interesting characteristics of BCL is that it
allows a flexible specification of the lattice space in which
the convolution operates. This is specified as lattice fea-
tures at each input point. Let L ∈ R
n×d
l
denote lattice
features at input points with d
l
denoting the dimensionality
of the feature space in which convolution operates. For in-
stance, the lattice features can be point position and color
(XY ZRGB) that define a 6-dimensional filtering space for
BCL. For standard 3D spatial filtering of point clouds, L is
given as the position (XY Z) of each point. Thus BCL takes
input features F and lattice features L of input points and
performs d
l
-dimensional filtering of the points.
3.2. Processing steps in BCL
As illustrated in Figure 2, BCL has three processing
steps, splat, convolve and slice, that work as follows.
Splat. BCL first projects the input features F onto the d
l
-
dimensional lattice defined by the lattice features L, via
barycentric interpolation. Following [1], BCL uses a per-
mutohedral lattice instead of a standard Euclidean grid for
efficiency purposes. The size of lattice simplices or space
between the grid points is controlled by scaling the lattice
features ΛL, where Λ is a diagonal d
l
× d
l
scaling matrix.
Convolve. Once the input points are projected onto the d
l
-
dimensional lattice, BCL performs d
l
-dimensional convolu-
tion on the splatted signal with learnable filter kernels. Just
like in standard spatial CNNs, BCL allows an easy specifi-
cation of filter neighborhood in the d
l
-dimensional space.
Slice. The filtered signal is then mapped back to the input
points via barycentric interpolation. The resulting signal
can be passed on to other BCLs for further processing. This
step is called ‘slicing’. BCL allows slicing the filtered sig-
nal onto a different set of points other than the input points.
This is achieved by specifying a different set of lattice fea-
tures L
out
∈ R
m×d
l
at m output points of interest.
All the above three processing steps in BCL can be writ-
ten as matrix multiplications:
ˆ
F
c
= S
slice
B
conv
S
splat
F
c
, (1)
where F
c
denotes the c
th
column/channel of the input fea-
ture F and
ˆ
F
c
denotes the corresponding filtered signal.
3.3. Properties of BCL
There are several properties of BCL that makes it par-
ticularly convenient for point cloud processing. Here, we
mention some of those properties:
• The input points to BCL need not be ordered or lie on
a grid as they are projected onto a d
l
-dimensional grid
defined by lattice features L
in
.
剩余11页未读,继续阅读
2021-04-30 上传
2019-08-12 上传
2023-06-04 上传
2023-06-10 上传
2021-05-26 上传
2015-04-21 上传
2018-07-04 上传
点击了解资源详情
点击了解资源详情

nihate
- 粉丝: 2015
- 资源: 24
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
