基于单片机C语言编程的自动门控制系统设计
版权申诉
191 浏览量
更新于2024-04-06
1
收藏 253KB DOCX 举报
所在位置和传感器信号决定门的动作:如果门已经打开,继续打开直到完全打开;如果门已经关闭,继续关闭直到完全关闭;如果门在中途停止,根据传感器信号判断物体位置,决定门的动作。 门完全打开后,停留一段时间,然后自动关闭,速度要适中,避免夹人事件发生。 1.3本设计的研究意义 本设计旨在通过单片机c语言编程实现自动门控制系统的自动化功能,提高自动门的性能、稳定性和安全性,同时减少人工操作、减轻人力负担,广泛应用于各种场所,提升用户体验和安全性。 2 自动门的单片机c语言编程设计 2.1系统功能设计 在本设计中,我们主要实现以下功能: 门的自动开关控制:通过传感器感应物体靠近门时,根据门的当前状态自动控制门的开启和关闭动作。 开门速度调节:通过主控制器可以调节门的开启速度,避免因开关速度过快导致的危险。 开门延时关闭:门完全打开后,延时一定时间再自动关闭,保证物体完全通过后再关闭门。 紧急停止功能:在必要时,可以通过紧急按钮或其他手段立即停止门的运行,保障人员安全。 2.2软件设计 2.2.1主控制器程序设计 主控制器程序是整个系统的核心,通过单片机c语言编程实现,主要包括以下功能模块: 传感器信号采集模块:负责接收传感器信号,判断物体是否靠近门,并给出相应的指令。 电机驱动控制模块:根据传感器信号和门当前状态,控制电机以适当的速度开启或关闭门。 速度调节模块:根据主控制器设置的参数,调节电机的速度,避免开关速度过快。 延时关闭模块:门完全打开后延时一定时间再关闭,保证安全通过。 紧急停止模块:在必要时,接收紧急停止信号,立即停止门的运行。 2.2.2传感器信号采集模块设计 传感器信号采集模块负责接收传感器信号,并判断物体是否靠近门。常用的传感器有红外传感器、超声波传感器等,我们可以根据实际需求选择适合的传感器类型。在程序设计中,需要对传感器信号进行采集和处理,判断物体位置和距离,从而确定门的动作。 2.2.3电机驱动控制模块设计 电机驱动控制模块负责控制门的开启和关闭动作,根据传感器信号和门当前位置,控制电机以恰当的速度运行。在程序设计中,需要考虑电机的正反转控制、速度控制、位置判断等功能,确保门的正常运行。同时,还需要考虑电机保护、过载保护等安全功能,避免电机损坏或安全事故发生。 2.2.4速度调节模块设计 速度调节模块通过主控制器设置参数,实现电机速度的调节功能。在程序设计中,需要考虑电机的加速度、减速度控制,保证开关速度适中,避免危险发生。同时,还可以根据实际需求设置不同的速度参数,适应不同场所的需求。 2.2.5延时关闭模块设计 延时关闭模块负责控制门完全打开后的延时关闭动作。在程序设计中,需要设置一个延时计时器,当门完全打开时开始计时,到达设定时间后自动关闭门。通过延时关闭功能,可以确保物体完全通过后再关闭门,避免夹人事件发生。同时,还可以根据实际需求设置不同的延时时间,适应不同的场所需求。 2.2.6紧急停止模块设计 紧急停止模块负责接收紧急停止信号,立即停止门的运行。在程序设计中,需要设置一个紧急停止按钮或其他手段,当发生紧急情况时按下按钮,系统立即停止门的运行,保障人员安全。同时,还可以考虑设置紧急停止后的复位功能,确保系统可以正常运行。 3 总结 本设计基于单片机c语言编程实现了自动门控制系统的自动化功能,提高了自动门的性能、稳定性和安全性。通过传感器信号采集、电机驱动控制、速度调节、延时关闭、紧急停止等模块设计,实现了门的自动开关、速度调节、延时关闭、紧急停止等功能。该系统功能强大、稳定可靠、安全性高,适用于各种场所,提升了用户体验和安全性。未来可以进一步优化系统功能,提高自动门的智能化水平,满足不同场所的需求。
自动门课程设计(基于单片机 c 语言编程)
2.5 门运行传感器的选择及配置
传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,
按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处
理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。
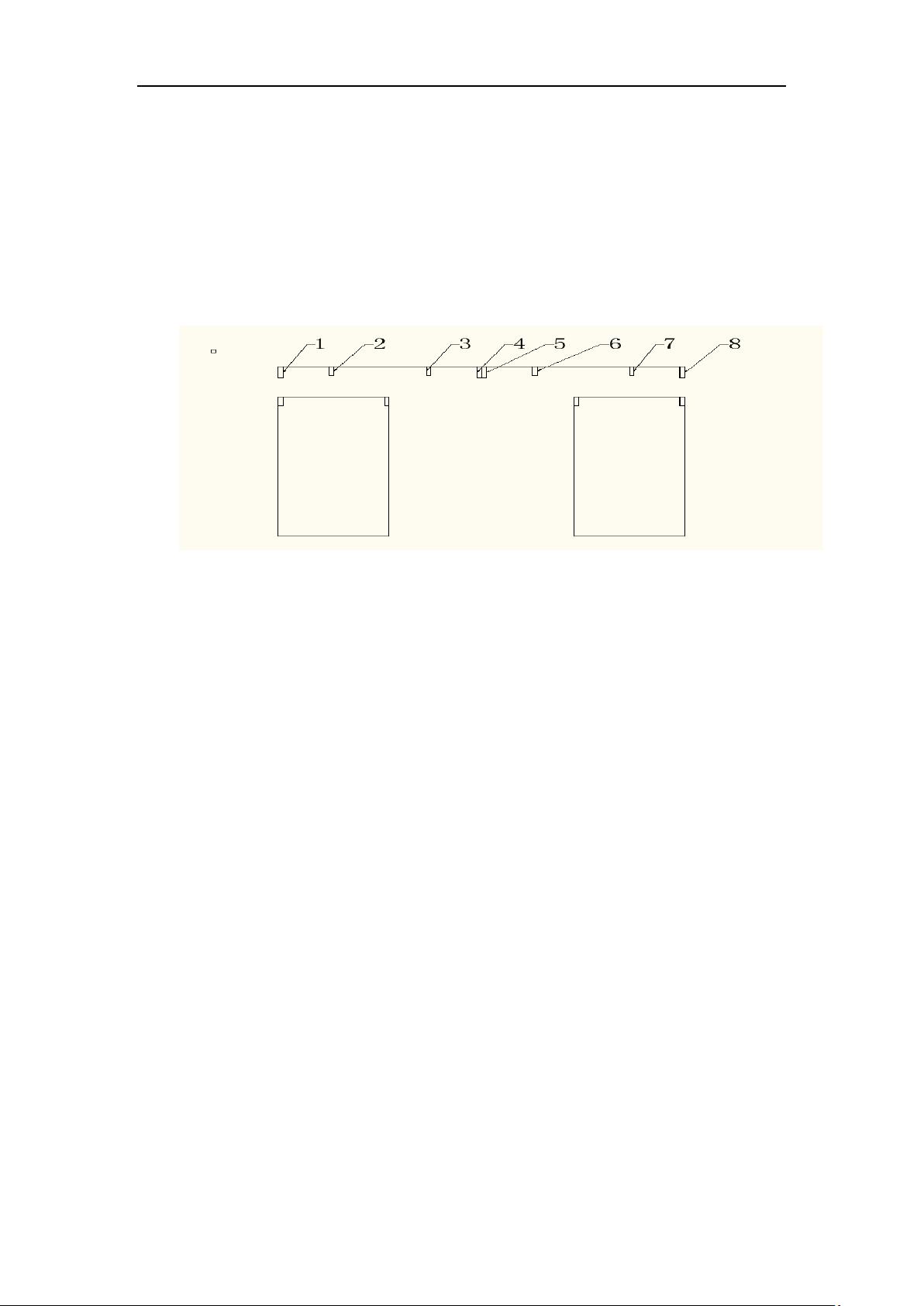
图 2-3 检测传感器位置图
1、4、5、8:行程开关
2、3、6、7:霍尔传感器
①行程开关:
可以安装在相对静止的物体(如固定架、门框等,简称静物)上或者运
动的物体(如行车、门等,简称动物)上。当动物接近静物时,开关的连杆驱动
开关的接点引起闭合的接点分断或者断开的接点闭合。由开关接点开、合状态的
改变去控制电路和机。
限位开关分工作限位开关和极限限位开关,工作限位开关是用来给出机
构动作到位信号的。极限限位开关是防止机构动作超出设计范围而发生事故的。
工作限位开关安装在机构需要改变工况的位置,开关动作后,给出信号,进行别
的相关动作。极限限位开关安装在机构动作的最远端,用来保护机构动作过大出
现机构损坏。
剩余28页未读,继续阅读
2022-06-23 上传
2022-07-01 上传
2022-06-28 上传
2022-10-26 上传
2022-07-03 上传
2021-10-14 上传

是空空呀
- 粉丝: 198
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







