血管机器人外结构优化:螺旋驱动性能提升
104 浏览量
更新于2024-08-12
收藏 613KB PDF 举报
"螺旋驱动血管机器人外结构参数优化 (2013年)"
本文详细探讨了螺旋驱动血管机器人的外结构参数优化,旨在提升其在血管内的运动性能。研究聚焦于螺旋参数,包括螺旋线数、螺旋升角、螺宽与螺距之比,通过数值模拟分析来比较不同配置下的血管机器人在流场中的表现。
首先,优化后的血管机器人参数设定为:螺旋线数6,外径8 mm,轴向长度15 mm,螺宽1.13 mm,螺高0.8 mm,螺升角45°。这个优化方案旨在平衡轴向推动力与液体阻力矩之间的关系,以实现更高效的推进能力。
数值模拟结果显示,优化后的血管机器人结构相比于原始设计,轴向推动力显著增加,提高了4.69倍。这意味着机器人在血管内能更有力地推动自身前进,有助于穿越狭窄或弯曲的血管段。同时,尽管推动力增强,但液体阻力矩仅增加了0.18倍,这表明优化设计在减少阻力方面也取得了良好的效果,从而减少了能量消耗,提高了机器人在血管中的操作精度和稳定性。
文章指出,血管机器人在血管系统中的应用潜力巨大,可以执行如清除血栓、定位投放药物等任务,对心血管疾病的治疗具有重要意义。然而,机器人在血管内的运行会受到血液流动的影响,其外结构参数对运行性能和作业精度至关重要。现有的研究多关注力学特性与流场分析,而对外结构优化的研究相对较少。
论文中提及的矩形螺旋驱动方式是血管机器人的一种常见驱动机制。机器人外部的螺旋结构在旋转时与血液相互作用,产生轴向推力,推动机器人沿血管前进。以胸主动脉为例,研究人员考虑了其尺寸和刚性壁面特性,设计了相应的机器人尺寸和螺旋参数。
该研究通过数值模拟和参数优化,为设计更加高效、低阻力的血管机器人提供了理论依据,对于未来血管机器人的发展和临床应用具有指导意义。它强调了在设计血管机器人时,必须充分考虑流体力学效应,以确保在复杂血管环境中的有效运作。
第
34
卷第
4
期
Vol. 34 No. 4
宁夏大学学报(自然科学版)
20B
年
12
月
Dec.
20B
Journal
of
Nin
日
xia
University('latural
Science
Edition)
文章编号:
0253
2
:
~2sc2013)04
0
:
~27
o5
螺旋驱动血管机器人外结构参数优化
江帆,
黄春燕,
杨朋乌海,
龙云
(广州大学机将与电气工程学院,广东广州
:11000
们
摘
要.为了改善螺旋驱动血管机器人运动性能,对其外结构参数进行数值优化.对不同螺旋参数(螺旋线数、螺旋
升角、螺宽与虫草距之比)的血管机器人外流场进行数值模拟比较分析.得到优化后的外形参数分别为:螺旋线主支队
外径
8
mm.
轴向长度
1:1
mm
,虫草宽
1.
13
mm
,螺高
0.
8
mm.
螺升角
4:10.
计算结采表明.优化后的血管机器人结构的
轴向推动力增加了
4.
的倍,而液体阻力矩仅增加了。.
18
倍.
关键词:血管机器人;螺旋驱动;流动分析;外结构参数优化;数值模拟
分类号:(中图)丁
P242
文献标志码:
A
血管机器人能够进入血管作业,清除血管系
统的血栓、在指定地点投放药物,针对病患点实施
医治,在重大心血管疾病治疗中发挥重要作用.血
管机器人进入血管后,受到血液流动的影响,其外
结构参数对血管运行和作业精度产生影响,因而
有必要进行血管机器人的外结构参数优化.陈柏、
梁亮、唐勇等研究了螺旋驱动的血管机器人的力
学特性和流场参数
Lt
习,江帆等研究了血管舒张、
弯曲对血管机器人外流场的影响["
G]
•这些研究对
血管机器人的运行控制和结构设计均有积极意
义,但较少涉及血管机器人外结构优化方面,因此
需要进一步对螺旋驱动的血管机器人外结构参数
进行优化.
1
矩形螺旋驱动血管机器人结构
外螺旋驱动是目前血管机器人的主要驱动方
式.图
1
中,血管机器人外表面加工有螺旋凸起,当
血管机器人旋转时,螺旋凸起与血液产生挤压,进而
产生轴向推力,推动血管机器人前进.
以正常人体的胸主动血管为例,将其管壁面视
为刚性壁面处理,血管直径
D=
11
mm
,长度
L=
80mm.
根据胸主动脉的尺寸大小,并参考南京航天
收稿日期:
2013
10 01
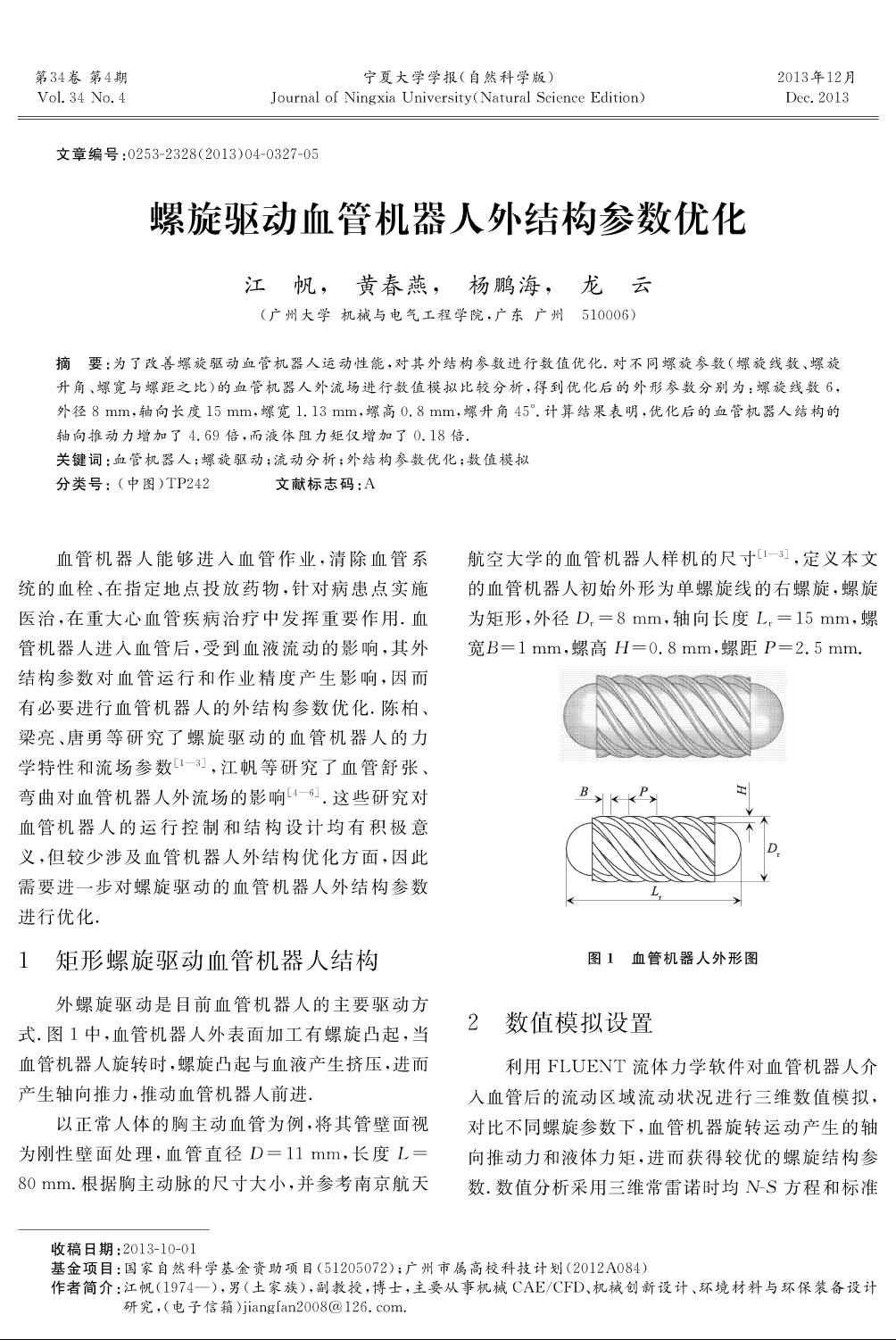
航空大学的血管机器人样机的尺寸
Lt
"-,定义本文
的血管机器人初始外形为单螺旋线的右螺旋,螺旋
为矩形,外径队=
8mm
,轴向长度
L,=15
mm
,螺
宽
B
二
lmm
,螺高
H
二
0.8
mm
,螺距
P
二
2.
5
mm.
>
.<>
< >
y
人
,飞
、呼
图
1
血管机器人外形图
2
数值模拟设置
利用
FLUEN
丁流体力学软件对血管机器人介
入血管后的流动区域流动状况进行三维数值模拟,
对比不同螺旋参数下,血管机器旋转运动产生的轴
向推动力和液体力矩,进而获得较优的螺旋结构参
数.数值分析采用三维常雷诺时均
N
S
方程和标准
基金项目:国家自然科学基金资助项目(
:1120:1072
);广州市属高校科技计划
C2012A084)
作者简介:江帆
(1974
),男(土家族),副教授,博士,主妥从事机械
CAE/CFD
、机械创新设计、环境材料与环保表备设计
研究,(电子信箱)
jiangfan2008@126.
com.
第
34
卷第
4
期
Vol. 34 No. 4
宁夏大学学报(自然科学版)
20B
年
12
月
Dec.
20B
Journal
of
Nin
日
xia
University('latural
Science
Edition)
文章编号:
0253
2
:
~2sc2013)04
0
:
~27
o5
螺旋驱动血管机器人外结构参数优化
江帆,
黄春燕,
杨朋乌海,
龙云
(广州大学机将与电气工程学院,广东广州
:11000
们
摘
要.为了改善螺旋驱动血管机器人运动性能,对其外结构参数进行数值优化.对不同螺旋参数(螺旋线数、螺旋
升角、螺宽与虫草距之比)的血管机器人外流场进行数值模拟比较分析.得到优化后的外形参数分别为:螺旋线主支队
外径
8
mm.
轴向长度
1:1
mm
,虫草宽
1.
13
mm
,螺高
0.
8
mm.
螺升角
4:10.
计算结采表明.优化后的血管机器人结构的
轴向推动力增加了
4.
的倍,而液体阻力矩仅增加了。.
18
倍.
关键词:血管机器人;螺旋驱动;流动分析;外结构参数优化;数值模拟
分类号:(中图)丁
P242
文献标志码:
A
血管机器人能够进入血管作业,清除血管系
统的血栓、在指定地点投放药物,针对病患点实施
医治,在重大心血管疾病治疗中发挥重要作用.血
管机器人进入血管后,受到血液流动的影响,其外
结构参数对血管运行和作业精度产生影响,因而
有必要进行血管机器人的外结构参数优化.陈柏、
梁亮、唐勇等研究了螺旋驱动的血管机器人的力
学特性和流场参数
Lt
习,江帆等研究了血管舒张、
弯曲对血管机器人外流场的影响["
G]
•这些研究对
血管机器人的运行控制和结构设计均有积极意
义,但较少涉及血管机器人外结构优化方面,因此
需要进一步对螺旋驱动的血管机器人外结构参数
进行优化.
1
矩形螺旋驱动血管机器人结构
外螺旋驱动是目前血管机器人的主要驱动方
式.图
1
中,血管机器人外表面加工有螺旋凸起,当
血管机器人旋转时,螺旋凸起与血液产生挤压,进而
产生轴向推力,推动血管机器人前进.
以正常人体的胸主动血管为例,将其管壁面视
为刚性壁面处理,血管直径
D=
11
mm
,长度
L=
80mm.
根据胸主动脉的尺寸大小,并参考南京航天
收稿日期:
2013
10 01
航空大学的血管机器人样机的尺寸
Lt
"-,定义本文
的血管机器人初始外形为单螺旋线的右螺旋,螺旋
为矩形,外径队=
8mm
,轴向长度
L,=15
mm
,螺
宽
B
二
lmm
,螺高
H
二
0.8
mm
,螺距
P
二
2.
5
mm.
>
.<>
< >
y
人
,飞
、呼
图
1
血管机器人外形图
2
数值模拟设置
利用
FLUEN
丁流体力学软件对血管机器人介
入血管后的流动区域流动状况进行三维数值模拟,
对比不同螺旋参数下,血管机器旋转运动产生的轴
向推动力和液体力矩,进而获得较优的螺旋结构参
数.数值分析采用三维常雷诺时均
N
S
方程和标准
基金项目:国家自然科学基金资助项目(
:1120:1072
);广州市属高校科技计划
C2012A084)
作者简介:江帆
(1974
),男(土家族),副教授,博士,主妥从事机械
CAE/CFD
、机械创新设计、环境材料与环保表备设计
研究,(电子信箱)
jiangfan2008@126.
com.
下载后可阅读完整内容,剩余4页未读,立即下载
2018-09-30 上传
2021-08-14 上传
2021-05-11 上传
2021-08-14 上传
135 浏览量
2024-11-19 上传
195 浏览量
113 浏览量
2021-08-11 上传

weixin_38637805
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
