多反射点下雷达目标跟踪算法详解
需积分: 0 26 浏览量
更新于2024-06-26
收藏 2.2MB PDF 举报
"该文档是关于使用毫米波雷达进行多反射点目标跟踪的算法说明,主要涉及了EKF(扩展卡尔曼滤波)在跟踪算法中的应用。文档经过多次更新和改进,增加了3D空间跟踪的推导以及针对3D和2D选项的配置参数描述。"
本文档详细阐述了如何利用跟踪雷达技术处理具有多个反射点的目标。核心算法基于扩展卡尔曼滤波(EKF),这是一种在存在非线性系统和观测模型时,对动态系统的状态进行估计的有效方法。EKF通过线性化非线性函数来近似真实的状态演变和测量过程,从而实现对目标位置、速度等参数的连续追踪。
在多反射点的场景下,雷达接收到的信号可能来自目标的不同部分,这增加了跟踪的复杂性。文档在Rev1.1版本中更新了组和质心协方差矩阵的计算,以更好地处理这些复杂的反射信息,提高跟踪精度。
随着版本的迭代,文档逐渐完善了配置参数的解释。在Rev1.3版本中,加入了3D空间跟踪的理论推导,使得算法能够适应三维环境中的目标追踪。此外,Rev1.4版添加了对3D或2D库选项的描述,并调整了配置参数以支持这两种模式,增强了算法的灵活性。
在Rev1.5版本中,文档变更了门限函数,从常量体积门限改为带有限制器的常量增益门限,这可能是为了更好地处理噪声和避免过拟合。随着时间的推移,文档持续更新,如在Rev1.6版根据tracker版本0.110进行了更新,而在Rev1.7版则增加了C代码实现细节和更多配置参数的解释,同时重新组织了文档结构,提升了可读性。
这份“TrackingRadarTargetswithmultiplereflectionpoints”文档为工程师和研究人员提供了一个深入理解如何利用毫米波雷达和EKF算法处理多反射点目标跟踪问题的宝贵资源。通过不断地更新和改进,它不仅提供了理论知识,还包含了实际应用中的配置和实现细节,对于开发和优化雷达跟踪系统具有重要的指导价值。
Tracking Radar Targets with multiple reflection points – Rev 1.8
12
• The above sequence of operation is repeated for the next time stamp.
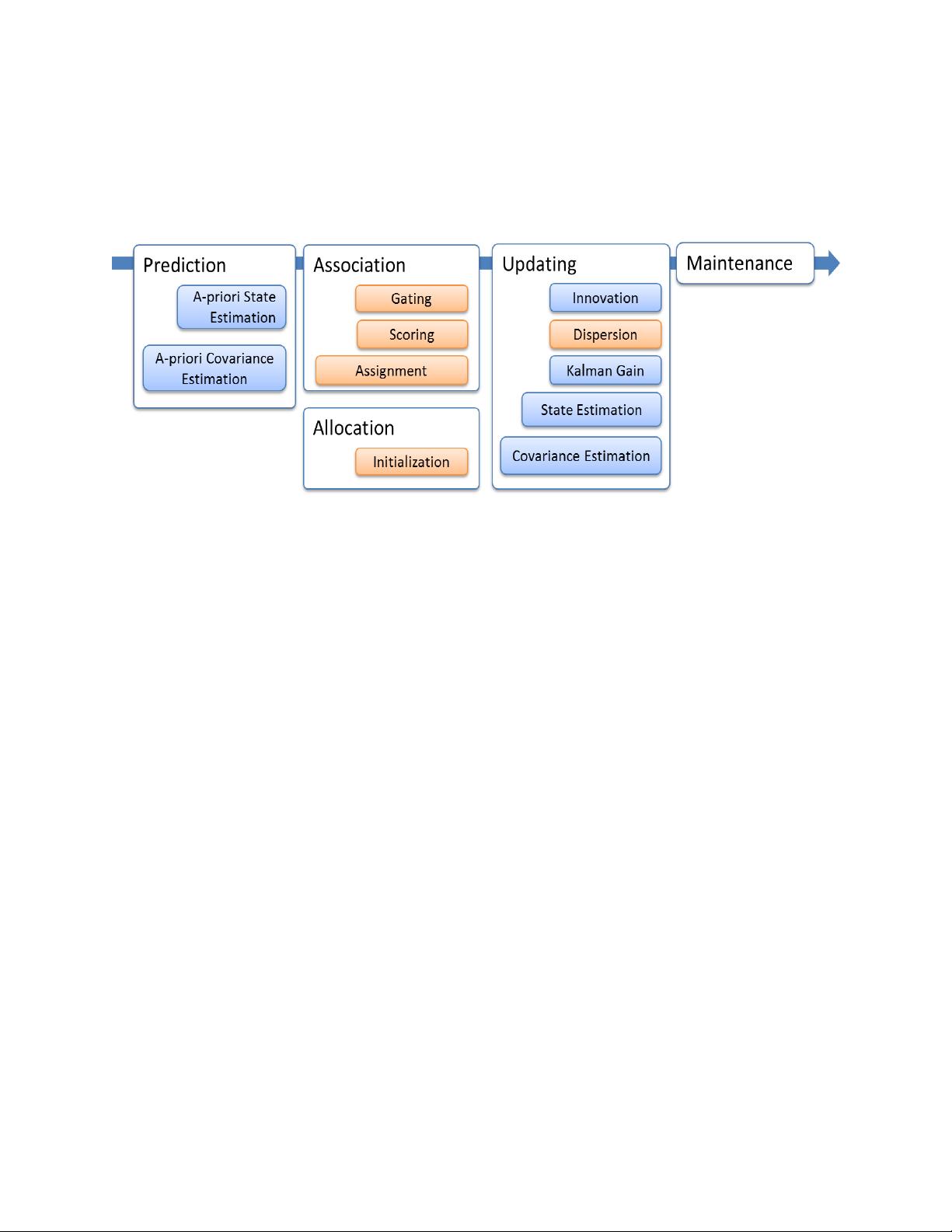
The main functional blocks of the group tracker algorithm are shown in a Figure 4. The blocks shown in
blue are classical extended Kalman filter (EKF) operations. The blocks shown in orange are additions to
support multipoint grouping. A description of each of these blocks is given in subsequent sections.
Figure 4. Tracking Block Diagram.
2.2. Prediction Step
As shown in Figure 4, the Kalman filter prediction step constitutes of computing the a-priori
state
and a-priori covariance
estimations for each trackable object based on state and
process covariance matrices estimated at time instance n-1. The a-priori state and a-priori covariance
estimates are obtained using:
(2-1)
(2-2)
The above equations constitute the prediction step of the Kalman filter. is the process noise
covariance matrix described in detail in Section Design of Process Noise Matrix6.4.3 in the appendix. In
addition, we also compute
which converts the predicted a-priori states
from
cartesian to spherical coordinates.
is subsequently used in the upate step of the group
tracker.
2.3. Association Step
The association step consists of associating radar measurements to a unique existing track. This is
accomplished by 3 main steps namely Gating, Scoring and Assignment as shown in Figure 4.
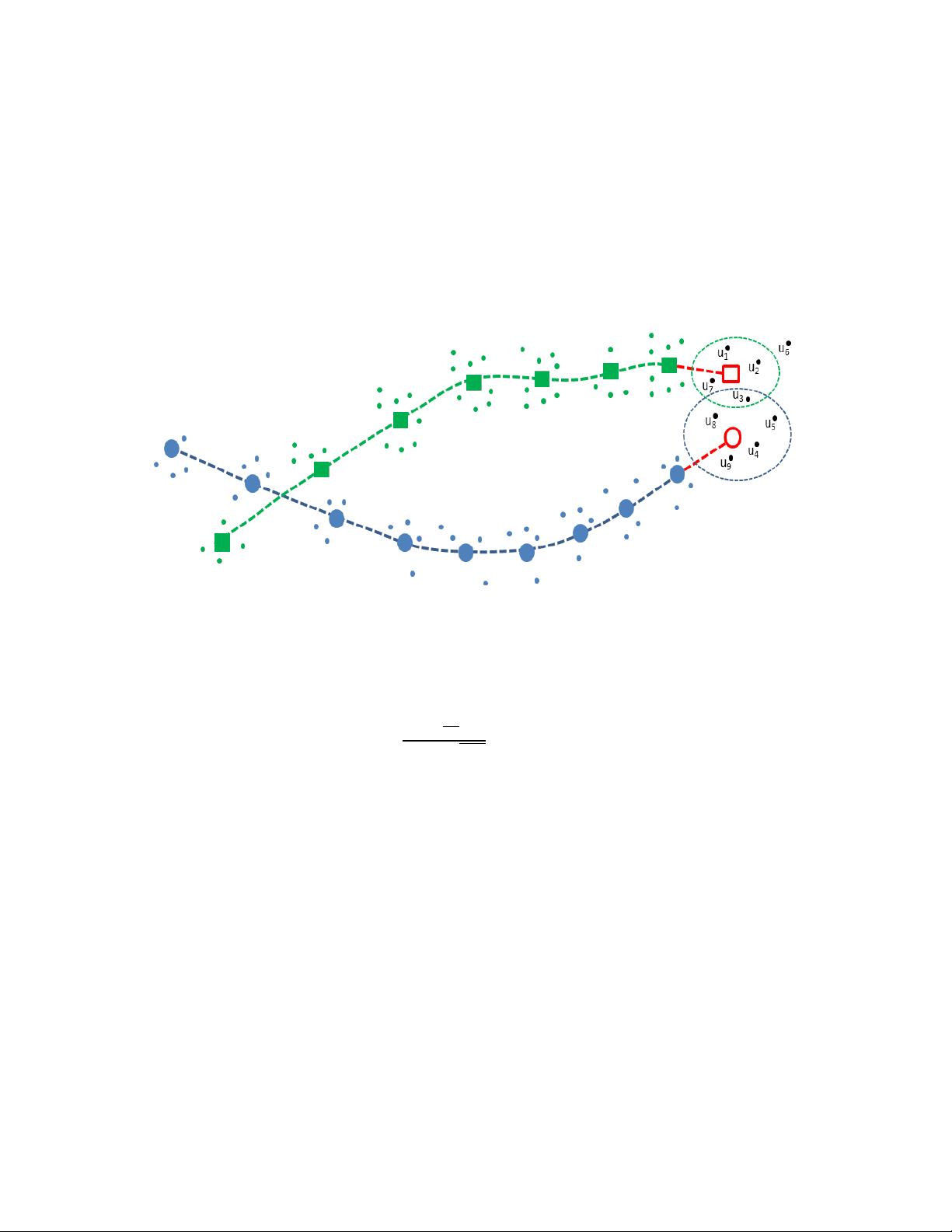
Assume existence of one or more tracks and the associated predicted state vector. For each given track,
we form a gate about the predicted centroid. The gate should account for (a) target maneuver, (b)
dispersion of the group, and (c) measurement noise. We use the group residual covariance matrix
to

剩余68页未读,继续阅读
218 浏览量
218 浏览量
107 浏览量
2024-09-05 上传
136 浏览量
110 浏览量
2021-02-19 上传
119 浏览量
2021-06-02 上传

qq_37418515
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Recuva v1.29.429:格式化数据恢复神器
- CSS作品集网站:创建与维护学生作业平台
- 500例Excel电子表格函数实用教程
- ASM NGS 2015:爆发调查软件挑战的数据分析与演示
- iOS两级菜单实现方案RTFlyoutMenu介绍
- C#MouseMove追踪绘制工具
- micro2440核心板原理图及PCB设计资源分享
- 通过Github实现的在线Nomic游戏开发指南
- MMC库:Mindustry Java模组创建基础
- 一键图标提取与替换大师:魔方图标大师功能解析
- 深入理解哈夫曼编码及其在C++中的实现
- PHP开源播客发布系统:PodcastGenerator功能介绍
- VB与SQL结合的自动点歌系统开发教程
- 8051单片机控制4线步进电机技术研究
- Nokia Mobile Internet Toolkit 4.1:WAP手机网站开发利器
- Android图片加密解密实用教程与MyPhotoEncryptDemo
