自动驾驶技术:空间域平滑滤波在环境感知中的应用
版权申诉
152 浏览量
更新于2024-06-28
收藏 4.51MB PPTX 举报
"自动驾驶环境感知技术-空间域平滑滤波.pptx"
在自动驾驶领域,环境感知技术是关键组成部分,它使车辆能够理解和预测周围环境,确保安全行驶。这一技术涉及多种传感器,如摄像头、雷达、激光雷达(LiDAR)等,用于收集数据并进行处理。空间域平滑滤波是图像处理中的一种重要技术,主要用于提高图像质量,消除噪声,为后续的自动驾驶决策提供更准确的视觉信息。
图像平滑,也称为图像滤波,主要是通过抑制或消除图像中存在的噪声来提升图像质量。根据处理方式,图像平滑可以分为空域滤波和频域滤波。空域滤波直接操作图像的像素灰度值,利用邻域模板进行运算。这种滤波方法简单直观,易于实现,常用于去除图像的局部噪声。
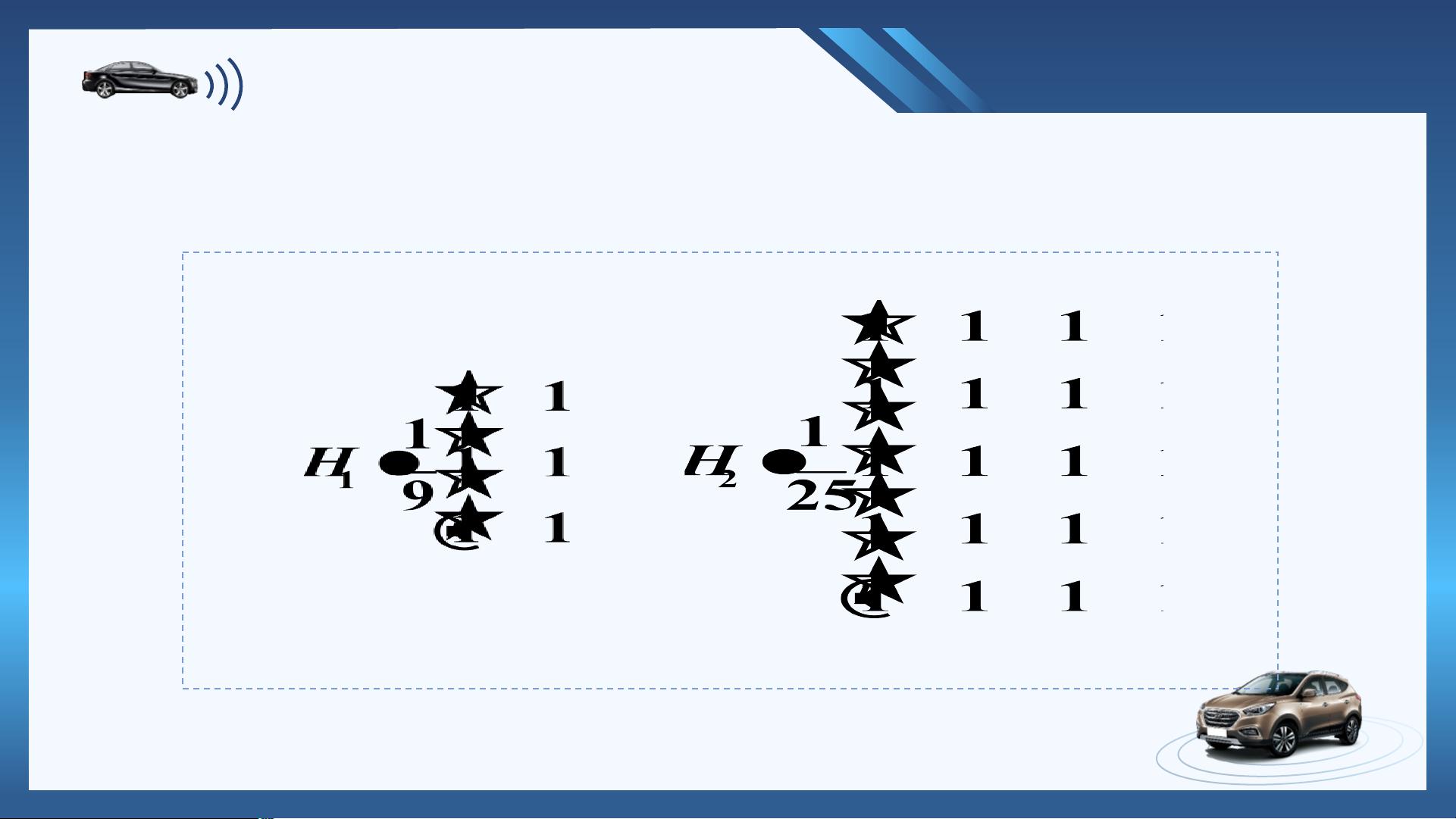
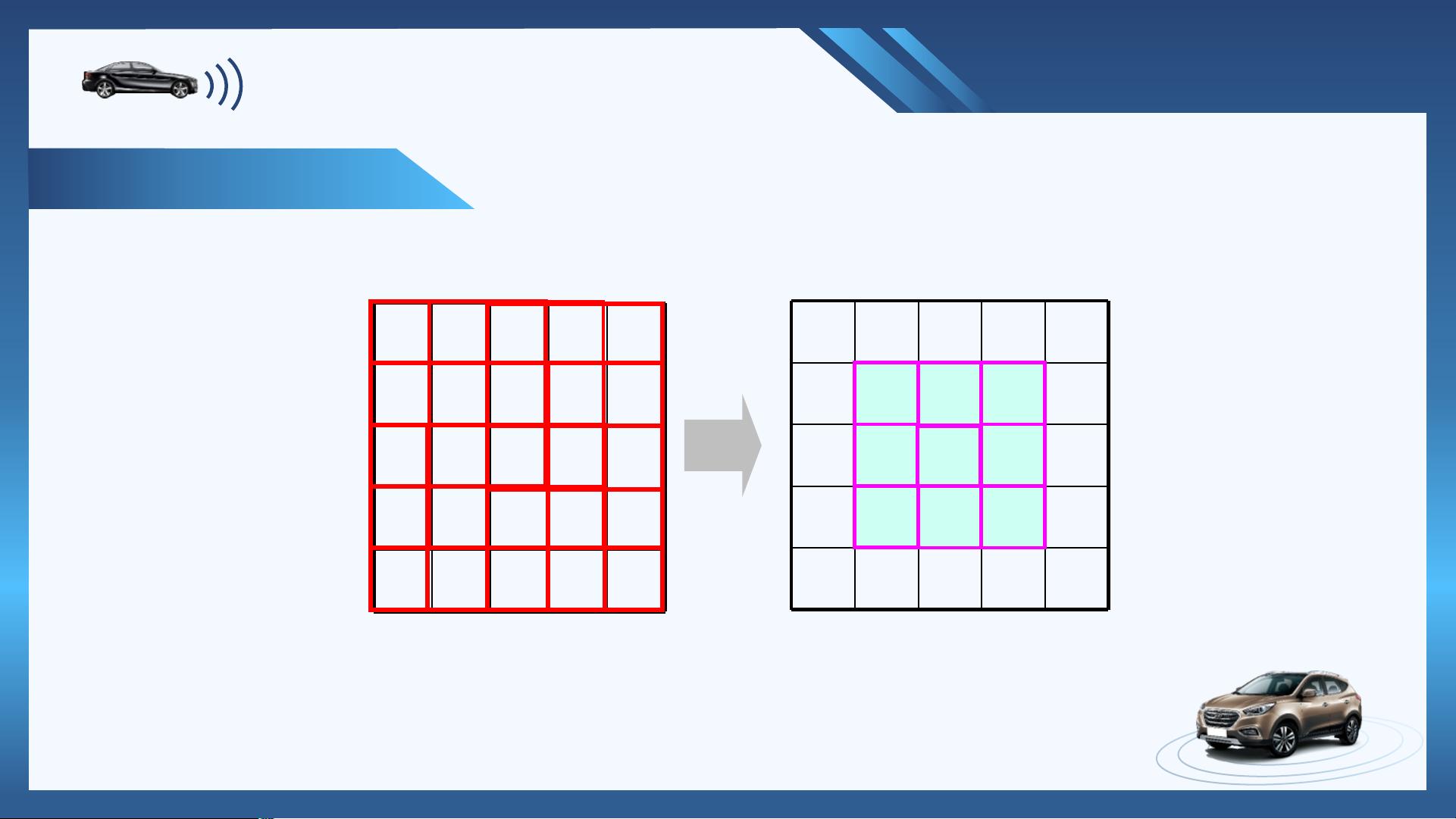
空间域平滑滤波包括线性和非线性两种。线性滤波中,常见的有均值滤波和高斯滤波。均值滤波是通过计算像素点邻域内的灰度值平均值来代替原像素值,例如使用3x3或5x5的模板。然而,这种方法在处理边界像素时可能没有进行处理,保留了原值。高斯滤波则使用高斯函数作为权重分配,其中标准差σ是决定滤波效果的关键参数。σ值较大时,滤波效果接近均值滤波,对图像平滑较为明显。
非线性平滑滤波中,中值滤波是最为典型的一种。中值滤波器不使用像素值的算术平均,而是选取邻域内的中值来替换中心像素值,特别适用于去除椒盐噪声。椒盐噪声表现为幅值近似的随机点,中值滤波能有效地去除这些点而不显著影响图像边缘。
高斯噪声则是一种遵循正态分布的噪声,均值滤波在处理高斯噪声时有一定效果,因为根据统计学原理,噪声的均值为0,可以通过计算均值来减弱噪声。然而,对于椒盐噪声,由于其均值不为0,均值滤波无法达到理想效果,此时中值滤波更为适用。
双边滤波是另一种结合了空域和频域信息的非线性滤波方法,它既考虑了像素的空间邻近性,又考虑了像素的灰度相似性。这种滤波器在保持边缘清晰的同时,能够有效地进行平滑,特别适合处理复杂的图像噪声场景。
在自动驾驶环境感知中,空间域平滑滤波技术的应用有助于提高传感器数据的质量,使得车辆能够更准确地识别道路、障碍物和其他交通参与者,从而实现更安全、更智能的驾驶。通过不断优化滤波算法,我们可以进一步提升自动驾驶系统的性能和可靠性。
空间域平滑滤波
常用的3 X 3和5 X 5的线性平滑简单均值模板
剩余25页未读,继续阅读
2022-11-23 上传
2022-11-23 上传
2022-11-23 上传
2022-11-23 上传
2022-11-23 上传
2022-11-23 上传
2022-11-23 上传

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- aws-sso-credentials-getter
- Win32 API中的自定义控件:标准消息
- tugasvuejs2:Tugas ke 2
- ToolsCollecting:收集各种工具,例如,Android 或 Web 开发等等
- terragrunt_sample
- shoutbreak:一个使用游戏机制进行本地化匿名消息传递的android 2.x应用程序(想想YikYak)
- DS-Algorithms:该存储库包含与数据结构相关的程序
- 跳棋:用php test.php运行的跳棋游戏
- 生活服务网站模版
- 2024.5.29 catkin-ws2.0
- WebBase
- yourls_zh_CN
- iap-verifier:应用内购买收据验证 API 的简单包装器
- gv-risingvoices-child-theme:gv-project-theme的子主题
- strapi-provider-email-mailjet:Strapi Mailjet的电子邮件服务提供商
- 农林牧副渔网站模版
