DENON RCD-M41 CD接收机详细操作指南与设置
版权申诉
102 浏览量
更新于2024-06-27
收藏 1.4MB PDF 举报
DENON天龙RCD-M41是一款CD接收机,其操作说明书详细介绍了设备的各个方面,旨在帮助用户充分利用这款产品的各项功能。以下是主要知识点的概要:
1. **连接方法**:
- 扬声器连接:包括扬声器电缆的连接步骤,以及如何根据设备类型(如低音炮、普通扬声器)进行连接。
- 模拟与数字设备连接:指南说明如何将RCD-M41与各种模拟输入(如收音机或其它音频设备)和数字输入(如数码音频设备)相连。
- FM天线和电源线的安装:确保正确的天线放置和电源线连接,以获得最佳信号。
2. **播放功能**:
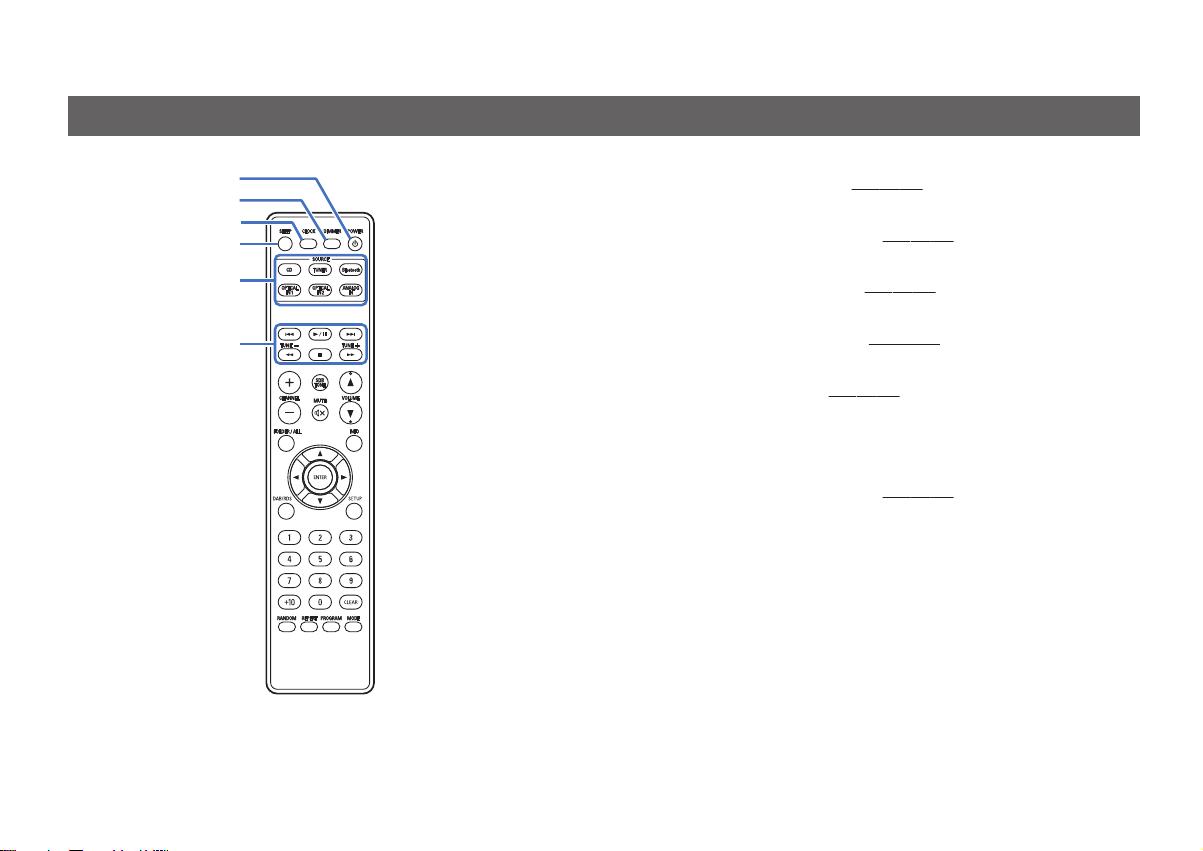
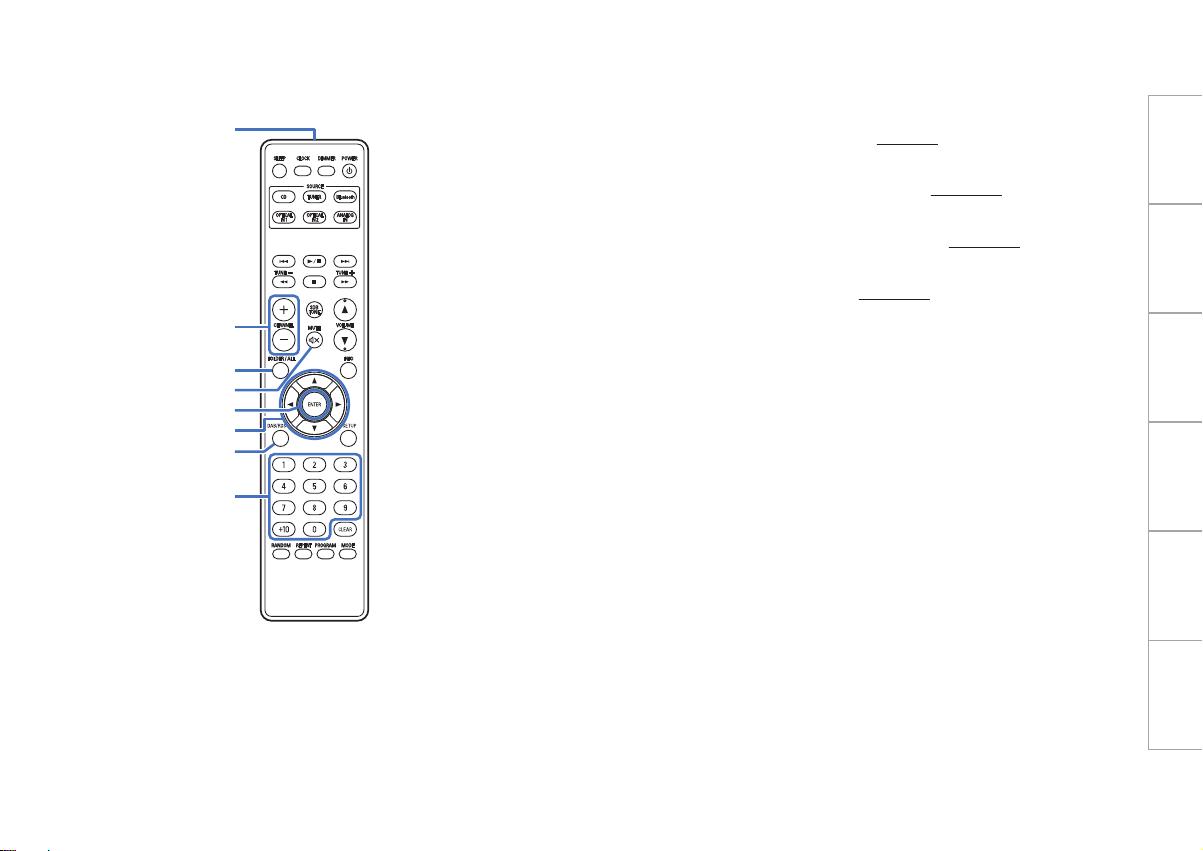
- 基本操作:涵盖如何开启和关闭电源,切换到待机模式,选择输入源,调整音量,以及播放不同类型媒体,如CD、DATACD、FM广播和蓝牙音乐。
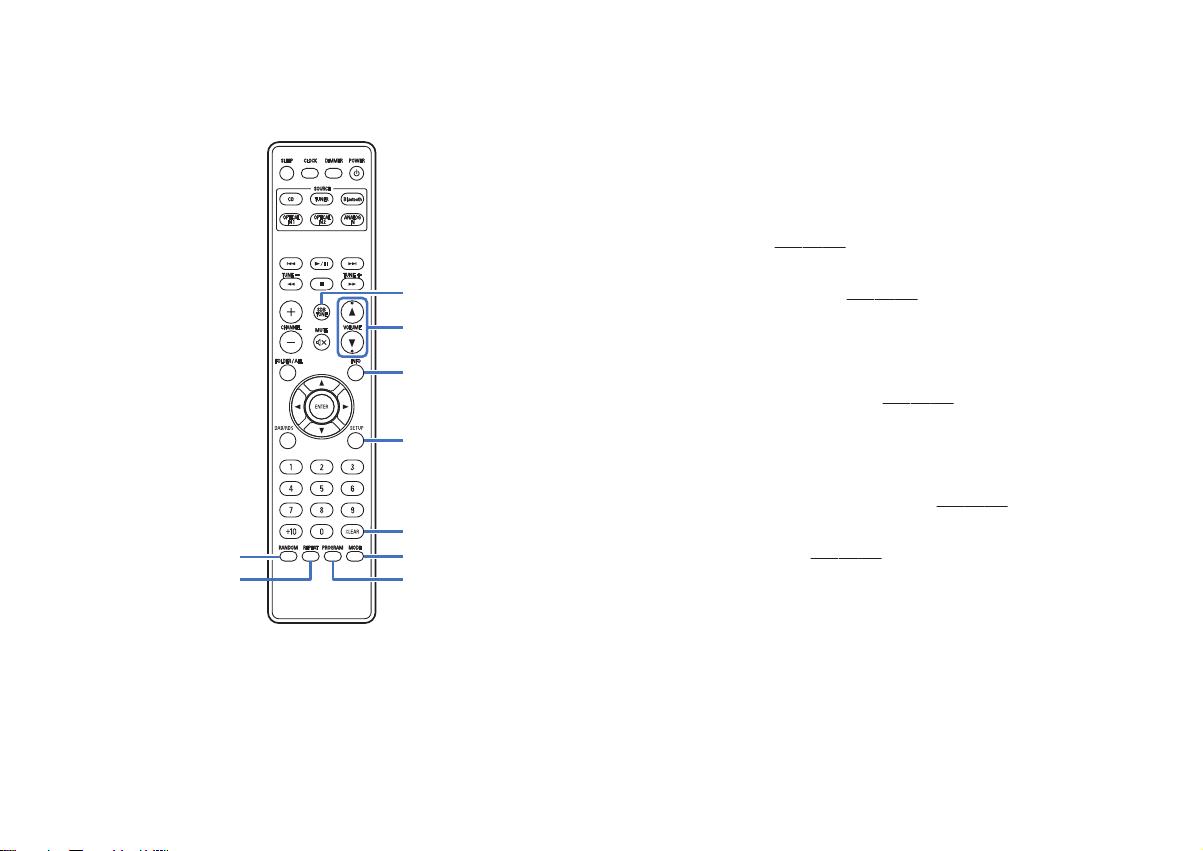
- 编程播放和自动/手动预设电台:用户可以按照设定顺序播放曲目,或者自定义FM电台预设。
- 数字输入和便捷功能:支持通过DIGITALIN和ANALOGIN接口播放音频,并提供了音调调节、睡眠定时器、时间显示和亮度控制等实用功能。
3. **设置选项**:
- 菜单操作指导:介绍如何进入不同设置,如时钟设置、报警设置、音量平衡、自动待机、CD自动播放、显示模式等。
- 提示与故障诊断:包含了设备运行时可能出现的常见问题及解决方法,以及如何执行恢复出厂设置和查阅保修和修理信息。
4. **安全与维护**:
- 附件清单:确保用户拥有所有必需的配件,如快速入门指南、安全说明、电池、遥控器、电源线、FM天线等。
- 使用注意事项:强调阅读和保存操作说明书的重要性,以及可能需要遵循的电台使用规定。
5. **附录**:
- 针对不同功能的深入说明,如播放DATACD的具体步骤、DIGITALIN和蓝牙设备的使用、以及关于光碟的信息。
- 最新功能记忆和术语解释:介绍了可能的新特性以及相关技术术语的定义。
- 商标信息、规格和索引,为用户提供完整的设备规格参数以及查阅方便。
DENON天龙RCD-M41操作说明书全面覆盖了设备的安装、连接、操作和维护各个层面,旨在帮助用户获得流畅的使用体验并解决潜在问题。通过详尽的指南,无论是初次使用者还是经验丰富的发烧友都能轻松掌握设备的操控技巧。
.
R
L
1
2
OPTICAL
DIGITAL IN
R L
ANALOG IN
SUB
WOOFER
OUT
SPEAKERS
t y
qwe r
FM 75
ANTENNA
A
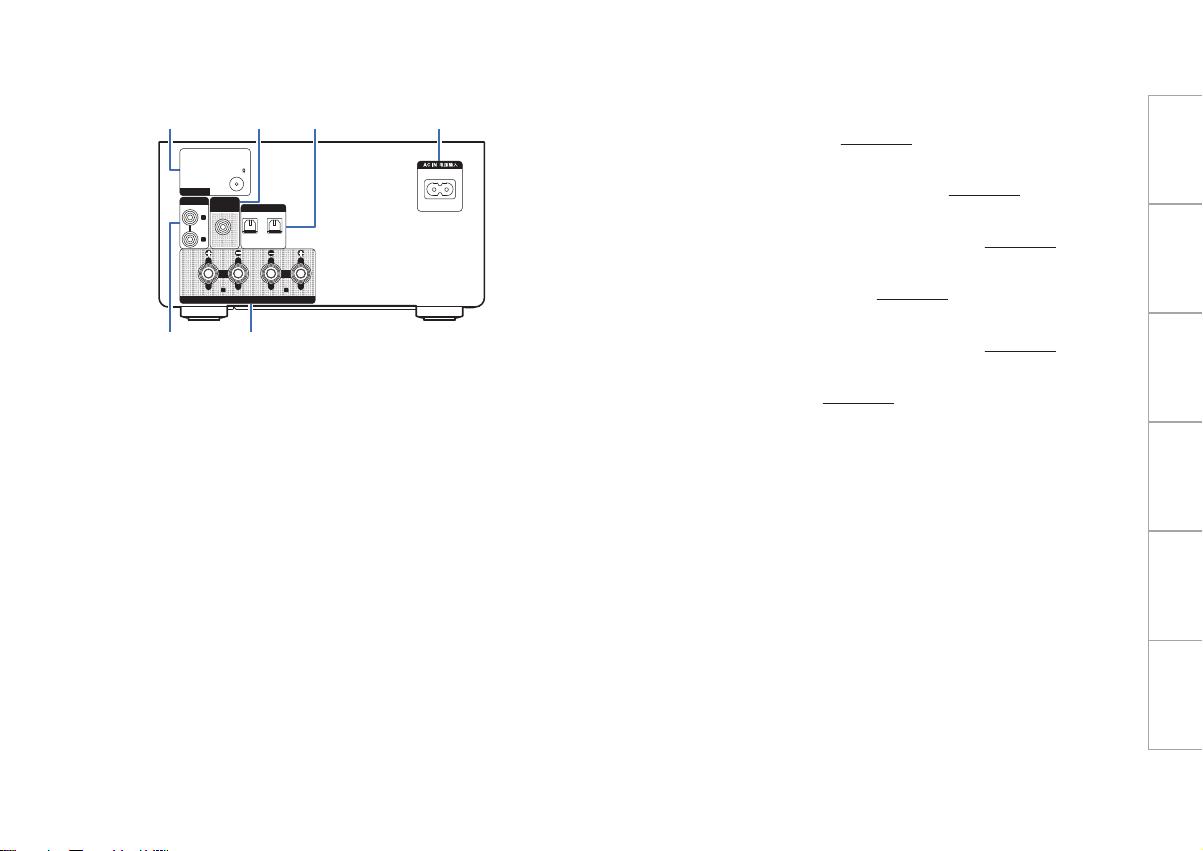
FM 天线(ANTENNA)端子
用于连接 FM 天线。 (v
第 21 页)
B
低音炮(SUBWOOFER OUT)端子
用于连接带内置放大器的低音炮。 (v 第 19 页)
C
数字音频(DIGITAL IN)端子
用于连接配备了数字音频端子的设备。 (v 第 20 页)
D
交流电引入插座(AC IN)
用于连接随附的电源线。 (v 第 22 页)
E
模拟音频(ANALOG IN)端子
用于连接配备了模拟音频端子的设备。 (v 第 20 页)
F
扬声器(SPEAKERS)端子
用于连接扬声器。 (v 第 18 页)
13
目录 连接方法 播放 设置 提示 附录
PrintingColor:Black
剩余75页未读,继续阅读
158 浏览量
477 浏览量
165 浏览量
2023-02-11 上传
2023-02-11 上传
158 浏览量
2023-02-11 上传
104 浏览量
106 浏览量

qingguo1979
- 粉丝: 40
- 资源: 7295
 我的内容管理
展开
我的内容管理
展开







最新资源
- CrystalDiskMark8
- 十九种不良生活习惯PPT
- Android-SecretCodes:Secret Codes是一个开源应用程序,可让您浏览Android手机的隐藏代码-Android application source code
- data-utils:围绕数据解析和转换的辅助函数集合
- bric_sheets_react
- yeelight:用于通过局域网控制yeeelight的nodeJS客户端库
- leetcode答案-daily_coding_problems:存储库包含我对DailyCodingProblem和InterviewCak
- 登录
- WechatApp-cinema:基于云开发的电影院订票微信小程序
- 资产负债管理
- STBlueMS_Android:“ ST BLE传感器” Android应用程序源代码-Android application source code
- crack:从Merb和Rails中复制的真正简单的JSON和XML解析
- cloud-dapr-demo:Dapr运行时演示和云提供商的无缝集成
- sherlock:夏洛克
- 熵权法 MATLAB实现,熵权法matlab实现+层次分析法,matlab源码.zip
- 组织设计与权力配置
