深海探测新突破:EfficientDet 提升水下物体检测性能
 已收录资源合集
已收录资源合集
需积分: 0 12 浏览量
更新于2024-08-03
收藏 2.16MB PDF 举报
"本文介绍了一个名为 DeepSeaNet 的项目,该项目致力于解决水下物体检测的难题,特别是针对含颗粒和杂质的盐水环境。研究人员在 Brackish 数据集中使用了 EfficientDet、YOLOv5、YOLOv8 和 Detectron2 等不同模型进行比较。Brackish 数据集包含了在能见度较低的 Limfjorden 水域拍摄的鱼类、螃蟹、海星等水生生物的注释图像序列。通过对比,发现 EfficientDet 在 mAP (平均精度均值) 上达到了 98.56%,优于其他模型,如 YOLOv3 (31.10% mAP)、YOLOv4 (83.72% mAP)、YOLOv5 (97.6% mAP) 和 Detectron2 (95.20% mAP)。此外,文章还提出了一个改进的 BiSkFPN 机制,即带有跳跃连接的 BiFPN 颈部,以进一步提升模型性能。"
在水下物体检测领域,由于环境条件的复杂性,传统的卷积神经网络 (CNN) 方法可能会遇到困难,且计算成本高。 EfficientDet 是一种高效的检测框架,它结合了 EfficientNet 的高效架构和 BiFPN 的特征金字塔网络,能够处理不同尺度的目标,从而在 Brackish 数据集上表现出色。YOLO (You Only Look Once) 系列是另一种广泛使用的实时目标检测算法,YOLOv5 和 YOLOv8 通过不断优化提升了检测性能,但仍然不及 EfficientDet。
YOLO 系列的最新版本,如 YOLOv8,引入了更多的优化,例如改进的锚框机制和更快的训练速度,使得它在检测精度上有显著提高。然而,尽管 YOLOv8 的 mAP 达到 98.20%,EfficientDet 仍以 98.56% 的 mAP 超过它,这表明在复杂环境下的检测能力上,EfficientDet 更具优势。
Detectron2 是 Facebook AI 研究院开源的一个通用目标检测库,它基于 Caffe2 构建,支持多种先进的检测算法。尽管 Detectron2 在 Brackish 数据集上表现良好,但其 mAP 仍低于 EfficientDet,表明在特定环境下,EfficientDet 的设计可能更适合处理水下视觉任务。
BiFPN(双向特征金字塔网络)是一种用于特征融合的结构,可以有效地利用多尺度信息。在本文中提出的 BiSkFPN 机制,通过添加跳跃连接,增强了特征的上下文信息传递,这可能是提升模型在水下环境中的检测性能的关键因素。
DeepSeaNet 项目通过对比不同模型在水下物体检测任务上的性能,强调了 EfficientDet 的优势以及 BiSkFPN 对于改善水下检测效果的重要性。这些研究结果为水下环境的自动化监测和保护提供了新的技术可能性,对于未来在海洋生物学、环境保护和水下机器人等领域有着广泛的应用前景。
3
recent works that has used EfficientDet algorithm along with
other OSOD. Secondly, I study FPN, PANet and BiFPN
bottlenecks used in OSOD algorithms. Finally, I study several
concepts form the related research that will be used in later
parts of the paper.
3.1-mynet: Improved EfficientDet using Attention
Mechanism (AM) – Multiclass Focal Loss (MFL):
A new method that uses AM to dampen the effect of noise
(caused by pollution, clouds, and climate) in remote sensing
images. This work [16] also modifies pooling in every layer
such that it can capture tiny class specific pixels and hence
uses exhaustive feature space. This approach increases
computational complexity but helps to achieve higher
accuracy. It is because of the residual deformable 3-D
convolution (RD3C) which extends the traditional 2-D
convolution operation to better capture object deformations
and variations in 3-D data (for e.g., space imagery or remote
sensing). Two basic operations that are used in the work are
3D-Convolutional operation and Geo-Spatial Deformable-3D
Convolutional Operation which is further explained in the
following equations. The standard 3D convolution operation
can be represented as:
where is the input volume, is the output volume, is the
convolution kernel, and , , and are the depth, height,
and width of the kernel, respectively. In RD3C, the 3D
deformable convolution operation is introduced before the
standard 3D convolution, which can be represented as:
where is the intermediate feature map obtained by the
deformable convolution operation, , , and are the
depth, height, and width of the offset kernel, respectively,
and is the learnable deformation offset applied to the
kernel. The deformation offset is learned from the input
features using a separate convolutional operation, which can
be represented as:
where
is the feature extraction function applied to the
input features,
is the set of learnable weights associated
with the
feature channel, and is the number of feature
channels. RD3C allows the convolution kernel to be
adaptively adjusted to the input features, which can better
capture the variations and deformations in 3D data, making
it well-suited for object detection tasks in high-resolution
remote sensing images of oil storage tanks.
3.2-Comparing YOLOv5 and EfficientDet
Mekhalfi et al., [17] initially perform a contrastive study and
provides enough evidence that proves, even though
EfficientDet results higher mAP but YOLOv5 can detect more
examples and has better generalization capabilities. They
reproduce results on EfficientDet and list out intuitions
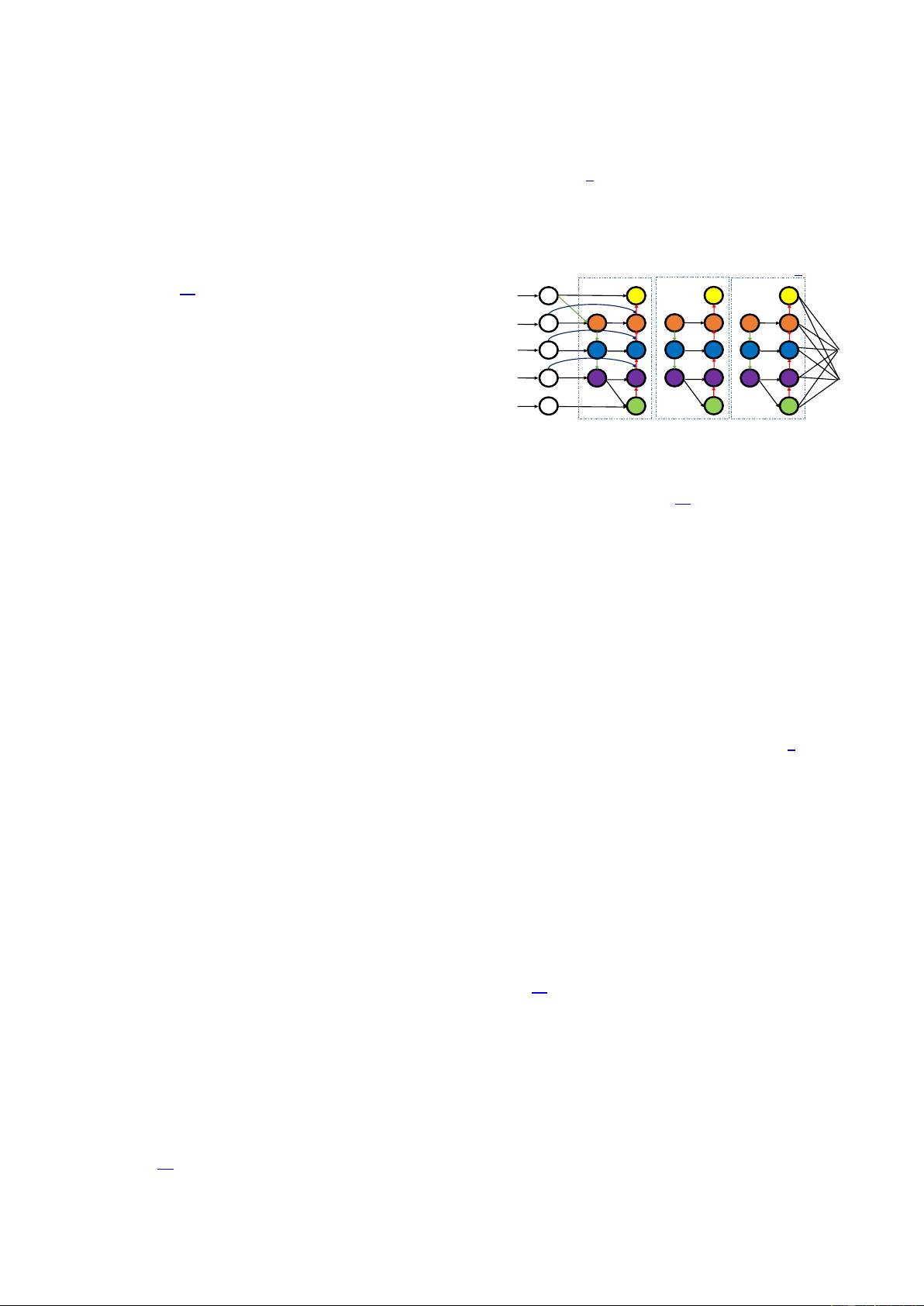
behind using BiFPN over FPN as follows:
1. Including nodes with one input edge will have a
smaller contribution in feature fusion. (Yellow nodes
in Figure 2)
2. Extra edge ties the input node to the output node.
(Green and blue edges from input to output nodes)
3. Each bidirectional path is considered as one feature
layer, repeated several times to enable high-level
feature fusion. (Up down arrows in Figure 2)
Figure 2 BiFPN Feature-Fusion (Bottleneck of original EfficientDet)
3.3-Automated Defect Detection: Modifying Backbone
Even though Medak et al., in [18] agree that object detection
algorithms require large amount of data to provide human-
level accuracy, they prove EfficientDet to be able to perform
SOTA results on realistic performance in Ultrasonic and
Forensics defect detection. They introduce a novel anchors
(sliding window) size finding mechanism for OSOD, a kind of
hyperparameter search. Anchors are predefined rectangles
used by one-stage detectors to predict object locations and
sizes. In this case, the hyperparameters are calculated using
a novel procedure that considers the aspect ratio of the
defects in UT images. This improves the detection of defects
with extreme aspect ratios and increases the model's
average precision. The complete novelty of this approach
can be explained with the following Algorithm 1. It involves
K-means clustering with Jaccard distance to calculate new
values for aspect ratios and scales, and finding the template
anchor size that is most like the calculated shape to
determine the scale factor. The final values greatly differ
from commonly used default values and were found to
improve the performance of the EfficientDet model in
detecting defects.
3.4-Multilayer 3D Attention Mechanism
The combination of feature fusion with multilayer attention
helps to extract features from low-level visibility keeping
feature channel intact for multi-scale inputs. This research
work [19] proposed a method for classifying military ships
from high-resolution optical remote sensing images using a
multilayer feature extraction network inspired by
EfficientDet trackers. In the proposed method, a multilevel
attention mechanism was used to effectively extract
multilayer features, and a deep feature fusion network was
constructed to locate and distinguish different types of ships.
In contrast, our approach for marine animal and species
detection uses a modified EfficientDet network with skip
connections to improve accuracy, rather than using the
proposed method. Residual connections are a type of skip
connection used in deep neural networks, but they have
some limitations compared to standard skip connections.
BiFPN Layer
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-09-15 上传
2024-09-30 上传
2024-09-03 上传
2024-01-28 上传
2021-02-03 上传
2021-02-19 上传

陈书予
- 粉丝: 2w+
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- MergeMarks-crx插件
- RMMapper(iPhone源代码)
- 淘宝新开店铺提取器.rar
- XinGePush:腾讯信鸽.NET SDK
- 多输入多输出MIMO系统广义奈奎斯特nyquist曲线绘制
- yashwanthkumarsuruneni:关于Y @ $ h
- 特效菜单 模块源码+例程-易语言
- sudoku
- 银河系访客
- Team-PI-Repo
- uCertify Proctoring-crx插件
- 智能巡检管理系统在电力线路巡检中的应用探究.rar
- 华南X79主板RAID驱动 适用于慢装系统.zip
- TRSDialScrollView(iPhone源代码)
- matlab代码字的大小-simLDPC:低密度奇偶校验码编码器和解码器仿真的MATLAB实现
- 测试
