并发广度优先搜索(iBFS)在GPU上的实现与优化
72 浏览量
更新于2024-08-25
收藏 1.17MB PDF 举报
"iBFS - Concurrent Breadth-First Search on GPUs - 2016 (ibfs_tcm18-284417)-计算机科学"
本文介绍了一种名为iBFS(并发广度优先搜索)的算法,该算法针对图形处理单元(GPU)进行了优化,用于高效执行多源节点的并发BFS。传统的BFS是一种关键的图算法,具有广泛的应用,例如在社交网络分析、路由算法和最短路径查找等领域。然而,同时进行多个BFS遍历以提高效率和探索更多可能性的需求催生了并发BFS的研究。
作者Hang Liu、H. Howie Huang和Yang Hu来自乔治华盛顿大学的电气与计算机工程系。他们设计并实现了iBFS,这是一种新的方法,能够有效地在GPU上运行并发BFS任务。以下是iBFS的核心特点:
1. **单一GPU内核**:iBFS创新地使用了一个单一的GPU内核来实现并发BFS,使得不同实例间的共享前沿能够被充分利用。这意味着不同BFS遍历可以并行进行,并且能够有效地协调共享数据,从而提高整体性能。
2. **基于出度的GroupBy规则**:iBFS通过基于出度的分组策略选择性地运行BFS实例。这一规则有助于最大化同一组内实例之间的前沿共享,减少了数据冗余和通信开销,进一步提升了性能。
3. **优化的位操作**:iBFS利用GPU上的高度优化的位操作技术,使单个GPU线程能够快速检查和处理大量信息。这提高了处理速度,使得在大规模图数据上执行并发BFS变得更为高效。
iBFS的这些设计不仅减少了GPU资源的浪费,还显著增强了并发性能。在大数据和复杂图形分析的背景下,这种优化对于提高计算效率至关重要。通过并发处理,iBFS能够更有效地应对大规模图结构中的并行任务,同时保持低延迟和高吞吐量。
iBFS是GPU计算领域的一个重要突破,它展示了如何通过创新算法设计和硬件特性利用,将图形算法的性能推向新的高度。对于需要处理大量图数据的领域,如社交网络分析、网络路由、生物信息学和机器学习等,iBFS提供了强大且高效的解决方案。
1
4
16
64
256
FB FR HW KG0 KG1 KG2 LJ OR PK RD RM TW WK
Frontier sharing percentage (log scale)
Top-down Bottom-up
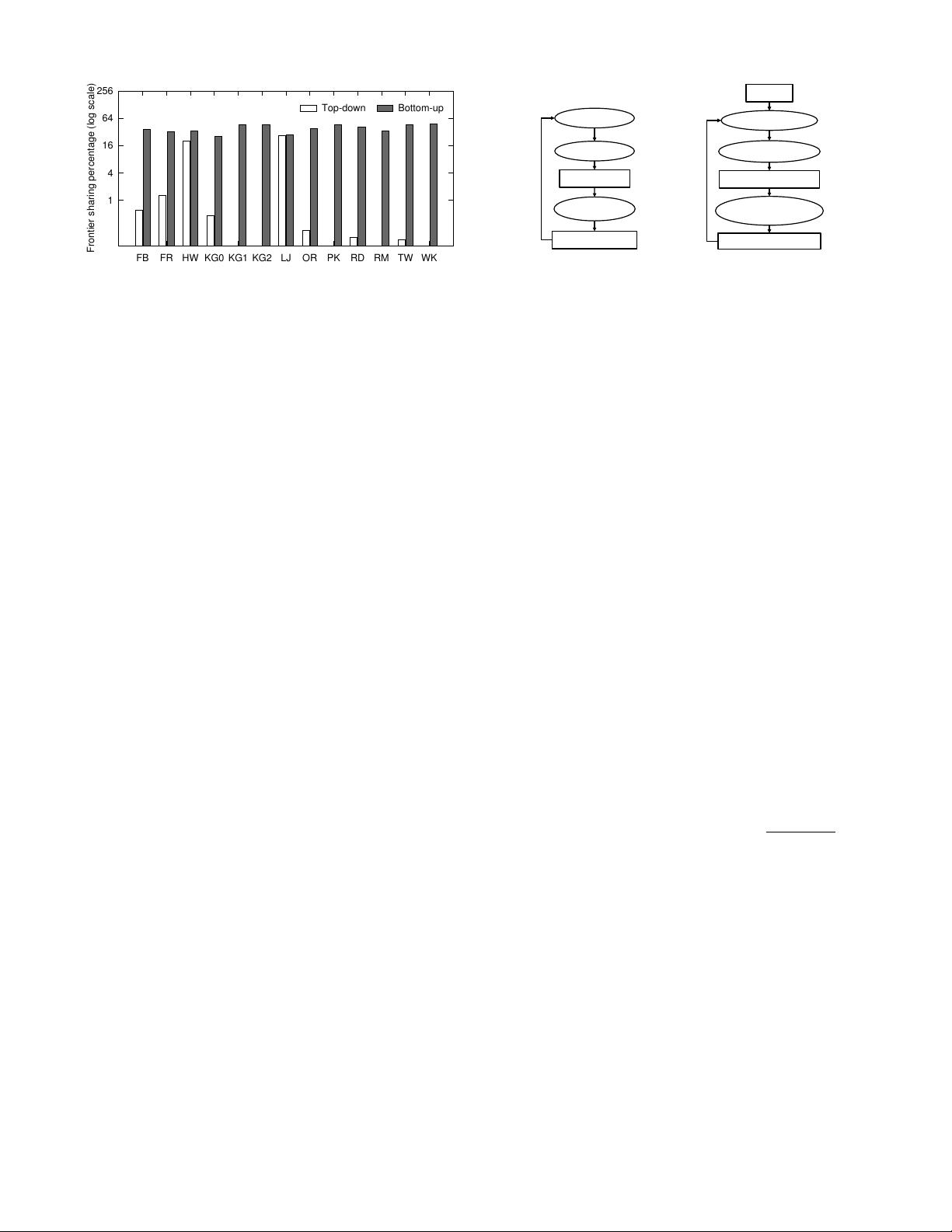
Figure 2: Average frontier sharing percentage between two differ-
ent BFS instances.
Among three tasks at each level, inspecting adjacent ver-
tices of the frontiers involves a lot of random memory ac-
cesses (pointer-chasing), accounting for most of the runtime.
This can be observed on four BFS traversals for both top-
down and bottom-up in Figure 1.
Concurrent BFS executes multiple BFS instances from
different source vertices. Using the example in Figure 1, four
BFS instances start from vertex 0, 3, 6, and 8, respectively.
A naive implementation of concurrent BFS will run all BFS
instances separately and keep its own private frontier queue
and status array. On a GPU device, each individual subrou-
tine is defined as a Kernel. Therefore, in the aforementioned
example, four kernels will run four BFS instances in parallel
from four source vertices. NVIDIA Kepler provides Hyper-Q
to support concurrent execution of multiple kernels, which
dramatically increases the GPU utilization especially when
a single kernel cannot fully utilize the GPU [34].
Unfortunately, this naive implementation of concurrent
BFS takes approximately the same amount of time as run-
ning these BFS instances sequentially, as we will show later
in Section 8. For example, for all the graphs evaluated
in this paper, sequential and naive implementation of con-
current BFS take average 52 ms and 48 ms, respectively,
with a difference in traversal rate of 500 million TEPS. The
main reason for such a small benefit is because simply run-
ning multiple BFS instances in parallel would overwhelm the
GPU, especially at the direction-switching level when a BFS
goes from top-down to bottom-up. At that moment each
individual BFS would require a large number of threads for
their workloads. As a result, such a naive implementation
may even underperform a sequential execution of all BFS
instances.
Opportunity of Frontier Sharing: iBFS aims to address
this problem by leveraging the existence of frontiers shared
among different BFS instances. Figure 2 presents the av-
erage percentage of shared frontiers per level between two
instances. The graphs used in this paper are presented in
Section 8. Top-down levels have smaller number of shared
frontiers (close to 4% on average) whereas bottom-up levels
have much more as high as 48.6%. This is because bottom-
up traversals often start from a large number of unvisited
vertices (frontiers in this case) and search for their parents.
The proposed GroupBy technique can improve the sharing
for both directions to 10× and 1.7×, respectively.
Potentially, the shared frontiers can yield three benefits in
concurrent BFS: (1). These frontiers need to be enqueued
only once into the frontier queue. (2). The neighbors of
shared frontiers need to be loaded in-core only once during
Status&Array&
Fron-er&Queue&
Expansion&
Inspec-on&
FQ&Genera-on&
Bitwise'Status'Array''
Joint'Fron2er'Queue'
Bitwise'Fron2er''
Iden2fica2on''
Bitwise'Inspec2on''
Joint'Expansion'
GroupBy'
(a) A Single BFS (b) iBFS
Figure 3: The flow charts of (a) BFS, (b) iBFS.
expansion. (3). Memory accesses to the statuses of those
neighbors for different BFSes can be coalesced. It is impor-
tant to note that each BFS still has to inspect the statuses
independently, because not all BFSes will have the same sta-
tuses for their neighbors. In other words, shared frontiers
do not reduce the overall workload. Nevertheless, this work
proposes that shared frontiers can be utilized to offer faster
data access and saving in memory usage, both of which are
critical on GPUs. This is achieved through a combination
of bitwise, joint traversals and GroupBy rules that guide the
selection of groups of BFSes for parallel execution.
3. iBFS OVERVIEW
In a nutshell, iBFS as shown in Figure 3, consists of three
unique techniques, namely, joint traversal, GroupBy, and
bitwise optimization, which will be discussed in Section 4,
5, and 6, respectively.
Ideally the best performance for iBFS would be achieved
by running all i BFS instances together without GroupBy.
Unfortunately, ever-growing graph sizes, combined with lim-
ited GPU hardware resources, puts a cap on the number of
concurrent BFS instances. In particular, we have found that
GPU global memory is the dominant factor, e.g., 12GB on
K40 GPUs compared to many TB-scale graphs.
Let M be GPU memory size and N the maximum number
of concurrent BFS instances in one group (i.e., the group
size). If the whole graph requires S storage, a single BFS
instance needs |SA| to store its data structures (e.g., the
status array for all the vertices), and for a joint traversal
each group requires at least |JF Q| for joint data structures
(e.g., the joint frontier queue), then N 6
M−S−|JF Q|
|SA|
. In
most cases N satisfies 1 < N i 6 |V |. In this paper, we
use a value of 128 for N by default.
Unfortunately, randomly grouping N different BFS in-
stances is unlikely to produce the optimal performance. Care
has to be taken to ensure a good grouping strategy. To il-
lustrate this problem, for a group A with two BFS instances
BFS-s and BFS-t, let JF Q
A
(k) be the joint frontier queue of
group A at level k, F Q
s
(k) the individual frontier queue for
BFS-s, and F Q
t
for BFS-t. Thus, |JF Q
A
(k)| = |F Q
s
(k)| ∪
|F Q
t
(k)| − |F Q
s
(k)| ∩ |F Q
t
(k)|, where |F Q
s
(k)| ∩ |F Q
t
(k)|
represents the shared frontiers between two BFS instances.
Clearly, the more shared frontiers each group has, the higher
performance iBFS will be able to achieve. Before we describe
the GroupBy technique in Section 5 that aims to maximize
such sharing within each group, we will first introduce how
iBFS achieves joint traversal in the next section which makes
parallel execution possible.
剩余13页未读,继续阅读
2022-09-14 上传
2021-05-24 上传
2021-10-03 上传
2020-05-21 上传
2021-09-29 上传
2021-10-03 上传
2013-05-15 上传
2024-10-29 上传
2024-10-29 上传

weixin_38519849
- 粉丝: 5
- 资源: 973
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
