改进的随机游走图采样算法:解决现有问题与新方法
PDF格式 | 388KB |
更新于2024-08-27
| 181 浏览量 | 举报
"基于随机游动的图采样是当前在大规模图数据处理中被广泛采纳的基本技术,用于高效地收集均匀节点样本。本文主要针对三种常用的随机游动图采样算法进行深入分析:重权随机游动(Re-weighted Random Walk, RW)、Metropolis-Hastings随机游动(Metropolis-Hastings Random Walk, MH)以及最大度随机游动(Maximum Degree Random Walk, MD)。
首先,作者指出这三种算法在实际应用中存在一些局限性。RW算法可能过于偏向于频繁访问高度连接的节点,导致采样结果非均匀;MH算法虽然能够提供更好的全局采样效果,但由于其接受/拒绝机制,采样效率可能会降低;而MD算法虽然简单易实现,但它可能导致采样集中于具有高度连接性的局部区域,牺牲了全局视角。
为了克服这些算法的不足,本文提出了两个新的随机游动图采样方法:拒绝控制的Metropolis-Hastings算法(Rejection-Controlled Metropolis-Hastings, RCMH)和广义最大度随机游动算法(Generalized Maximum Degree Random Walk, GMD)。RCMH算法通过调整接受/拒绝策略,在保持局部连通性和全局采样之间找到了一个平衡点,从而改善了RW算法的非均匀性问题,同时又避免了MH算法的效率瓶颈。另一方面,GMD算法则在保留MD算法的优点——对全局结构的敏感性的同时,通过更精细的设计来减少局部聚集现象,使得采样更具多样性。
本文不仅对现有随机游动图采样算法进行了深入剖析,还提出了创新的方法来改进其性能,为大规模图数据的分析和挖掘提供了更为有效和均衡的工具。这不仅有助于提高图采样的效率,也对实际应用中的网络数据分析、推荐系统和社交网络研究等领域具有重要意义。"
where S is the set of sampled nodes and w
rw
(u) ∝ 1 /d
u
denotes the weight of node u. Note that here the weight
w
rw
(u) can be up to any multiplicative constant.
It was shown that the above estimator can be interpret-
ed using the importance sampling (IS) framework [9], [23].
Specifically, instead of drawing nodes from the target dis-
tribution, the IS framework samples nodes from a different
and easily implemented trial distribution [ 12]. In the RW
algorithm, the target distribution is the uniform distribution
π
u
, and the trial distribution is π
rw
. According to the IS
framework [12], the importance weight for a node u is
given by w
rw
(u)
Δ
= π
u
(u)/π
rw
(u)=2m/nd
u
∝ 1/d
u
meeting the definition in Eq. (2). It was turned out that
the estimator E
π
rw
(f) is asymptotically unbiased [12], i.e.,
E
π
rw
(f) → E
π
u
(f) as n →∞. The variance of the estimator
E
π
rw
(f) depends on the variance of f(u)w
rw
(u).Iff(u) is
uncorrelated with w
rw
(u)=π
u
(u)/π
rw
(u), such variance
relies on the similarity between π
u
(u) and π
rw
(u). Intuitively,
the closer the trial distribution π
rw
and the target distribution
π
u
are, the lower the variance of the estimator E
π
rw
(f).Liu
in [12] proposes a “rule of thumb” to quantify this intuition
which can also be used to measure the effectiveness of the
IS framework. Specifically, assume that there is an estimator
ˆ
E using N independent samples from the target distribution q
(q = π
u
in our case). Then, Liu’s “rule of thumb” states that
the numbe r of samples from the trial distribution p (p = π
rw
in our case) is at most N (1+var
p
(q(X)/p(X))) to ach ieve
the same variance as that o f
ˆ
E [12], [11], [24], [25]. As a
consequence, we strive to seek a trial distribution p such that
var
p
(q(X)/p(X)) (also called the χ-distance between q and
p [12])isassmallaspossible.
In RW, the trial distribution π
rw
is proportional to the
degree of nodes, while the target distribution is the uniform
distribution π
u
. As shown in our experiments, π
rw
is typically
far from the uniform distribution π
u
in many real-world
graphs. That is to say, there is a large deviation between the
trial and target distributions of RW in many real-world graphs.
By Liu’s “rule of thumb”, the effectiveness of RW depends on
the similarity between π
u
and π
rw
. Therefore, in many real-
world graphs, RW suffers from the large deviation problem.
Metropolis-Hastings random walk (MH). The MH algor ithm
is an application of the Metropolis-Hastings algorithm [26],
[27] for unbiased graph sampling. It makes use of a modified
random walk to draw nodes from the graph. In particular, it
modifies the transition p robabilities of a random walk so that
the walk converges into a uniform distribution. The transition
probability of MH is given by
P
mh
uv
=
⎧
⎨
⎩
1/d
u
× min{1,d
u
/d
v
},ifv∈ N(u),
1 −
u=w
P
mh
uw
,ifu= v,
0,otherwise,
(3)
where min{1,d
u
/d
v
} is the acceptance function of MH. Let
v ∈ N(u) be a neighbor of node u.WhenMHdrawsa
node v from N(u) with probability 1/d
u
, MH accepts v as
a sample with probability min{1,d
u
/d
v
}, and reject it with
probability 1 − min{1,d
u
/d
v
}. It h as turned out that the
stationary distribution of MH is π
mh
= π
u
=[1/n, ··· , 1/n]
[10], [1]. Therefore, the sample mean obtained by MH can be
directly used to construct an unbiased estimator for E
π
u
(f).
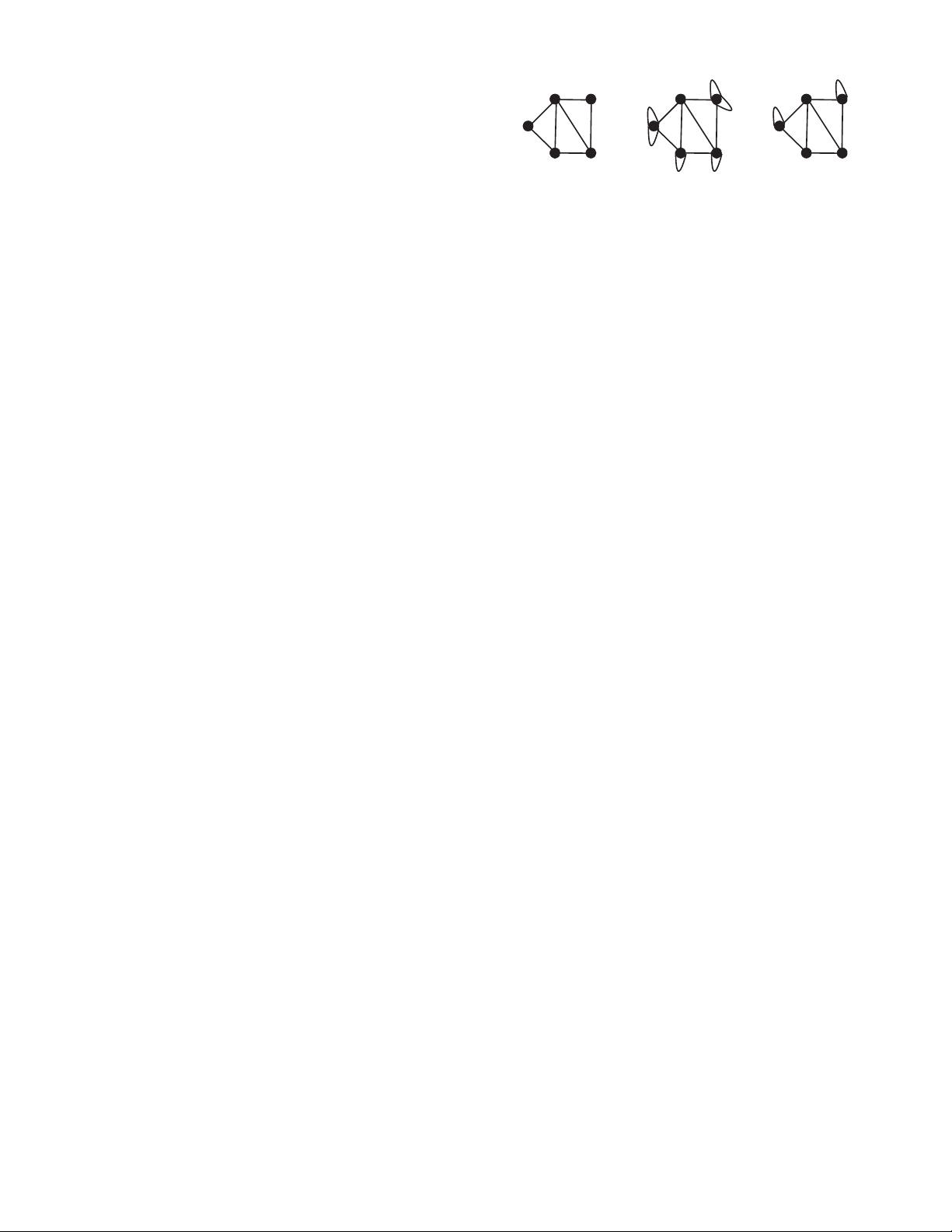
V1
V2
V3
V5
V4
(a)
V1
V2
V3
V5
V4
(b)
(c)
V1
V2
V3
V5
V4
Fig. 1: Running example
Using the language in IS framework, the trial distribution of
MH is equivalent to th e target distribution, i.e., π
u
= π
mh
.
This suggests that MH can overcome the large deviation
problem of RW. However, this is not free. To obtain the
uniform samples, MH has to reject a considerable number of
samples. In other words, to achieve the same sample size as
that of RW, MH g enerally needs to d raw a lot more nodes than
RW. In the setting o f unbiased graph sampling, the primary
costs of different algorithms are measured by the number of
nodes drawn by various algorithms [1]. If we fix the number of
nodes that different algorithms need to draw, then the number
of final samples obtained by MH is much smaller than that of
RW, which clearly degrades the performance of MH. Hence,
the MH algorithm suffers from the sample rejection problem.
Maximum-degree random walk (MD). The MD algor ithm
runs a random walk on a dynamically created regular graph to
collect nodes [7], [11]. The idea is that the algorithm modifies
the original graph into a regular graph by adding self-loops
on the nodes so that the degree of each node equals the
maximum degree of the o riginal graph . Note that this can
be done implicitly and on-the-fly. Specifically, when the walk
traverses a node u, the walk selects a neighbor node from N(u)
with probability 1/d
max
,whered
max
denotes the maximum
degree of the original graph. Following this process, in each
step, the walk stays at u with probability (d
max
− d
u
)/d
max
.
That is to say, th e walk traverses the self-loop with probability
(d
max
−d
u
)/d
max
. Fig. 1(a) and Fig. 1(b) illustrate the original
graph and the corresponding regular graph respectively. For the
graph in Fig. 1(a), the maximum degree is 4. Hence, each node
in the corresponding regular graph shown in Fig. 1(b) has a
degree of 4 including self-loops. The maximum-degree random
walk on a graph is equivalent to the traditional random walk
on the corresponding regular graph. This fact indicates that the
stationary distribution of the maximum-degree random walk is
a uniform distribution. As a result, the sample m ean obtained
by MD can be directly utilized to construct an unbiased
estimator for E
π
u
(f) [7]. Similarly, using the language in
IS framework, the trial distribution of MD is equal to the
target distribution π
u
. Therefore, MD can circumvent the large
deviation problem of RW.
MD also has its drawbacks. First, the algorithm will produce
many repeated samples, because MD needs to traverse the
self-loops. This issue worsens when the walk traverses the
low-degree nodes as these nodes must add many self-loops.
Note that too many repeated samples typically result in a large
variance for the random walk based samplers [2]. Thus, MD
suffers from the repeated samples problem. Second, MD re-
quires the knowledge of maximum degree which is impractical
in the context of unbiased graph sampling via crawling. To
overcome this problem, Bar-Yossef et al. [7] propose to set
a very large constant as the maximum degree. Clearly, this
929
剩余11页未读,继续阅读
相关推荐




13 浏览量

weixin_38555304
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
