移动用户协作相对定位:融合IMU惯性与UWB测距技术
165 浏览量
更新于2024-08-26
1
收藏 86KB PDF 举报
"该论文探讨了通过融合IMU惯性和UWB测距信息来实现移动用户的协作相对定位技术,旨在解决在无GPS或其他全局定位系统覆盖下的定位问题。在搜索与救援、社交互动等多用户应用中,相对定位具有重要意义。"
在本文中,作者Ran Liu, Chau Yuen, Tri-Nhut Do, Dewei Jiao, Xiang Liu 和 U-Xuan Tan提出了一种创新方法,利用惯性测量单元(IMU)和超宽带(UWB)测距设备的组合来克服单个技术的局限性。IMU可以实时监测设备的运动状态,例如加速度和角速度,从而推算出短时间内位置的变化。然而,由于累积误差的存在,长时间使用IMU会导致定位精度下降。
超宽带(UWB)技术则是一种无线通信技术,能提供高精度的距离测量,不受视线(LOS)限制,即使在有遮挡的情况下也能工作。UWB通过发送极短的脉冲信号来确定物体间的距离,但不提供方向信息,且通信范围有限,这使得仅依赖UWB无法无歧义地确定用户的位置。
为了解决这个问题,论文提出了一种结合IMU和UWB的方法,通过融合两者的优势,实现在没有全局定位信息的情况下,多移动用户的相对位置精确估计。这种方法可能包括实时校正IMU的累积误差,以及利用UWB提供的距离数据来修正和验证IMU的定位结果。通过这种方式,可以提高定位的稳定性和准确性,尤其是在室内或复杂环境中的定位性能。
论文的贡献可能包括算法设计、实验验证以及性能评估。通过实际测试和仿真结果,作者可能展示了该方法在不同条件下的表现,证明了其在减少定位不确定性、增强定位可靠性和拓展通信范围方面的有效性。这种融合技术对于未来智能物联网、机器人导航、无人机协同和增强现实等领域的应用具有重要的理论和实践价值。
这篇研究论文深入研究了移动用户之间的相对定位问题,提出了一种结合IMU和UWB的新方法,以克服单一技术的局限性,实现更精确、鲁棒的定位服务。这种方法对于扩展定位技术的应用场景,特别是在那些传统GPS无法覆盖的领域,具有显著的意义。
Cooperative Relative Positioning of Mobile Users by Fusing IMU
Inertial and UWB Ranging Information
Ran Liu, Chau Yuen, Tri-Nhut Do, Dewei Jiao, Xiang Liu, and U-Xuan Tan
Abstract— Relative positioning between multiple mobile users
is essential for many applications, such as search and res-
cue in disaster areas or human social interaction. Inertial-
measurement unit (IMU) is promising to determine the change
of position over short periods of time, but it is very sensitive
to error accumulation over long term run. By equipping the
mobile users with ranging unit, e.g. ultra-wideband (UWB), it is
possible to achieve accurate relative positioning by trilateration-
based approaches. As compared to vision or laser-based sensors,
the UWB does not need to be with in line-of-sight and provides
accurate distance estimation. However, UWB does not provide
any bearing information and the communication range is
limited, thus UWB alone cannot determine the user location
without any ambiguity. In this paper, we propose an approach
to combine IMU inertial and UWB ranging measurement for
relative positioning between multiple mobile users without the
knowledge of the infrastructure. We incorporate the UWB and
the IMU measurement into a probabilistic-based framework,
which allows to cooperatively position a group of mobile users
and recover from positioning failures. We have conducted ex-
tensive experiments to demonstrate the benefits of incorporating
IMU inertial and UWB ranging measurements.
I. INTRODUCTION
Indoor positioning systems are essential to provide many
public, commercial, and military services. Many researchers
concentrate on the absolute positioning in a global coordinate
system with respect to a specific infrastructure, where many
reference anchors with known positions are deployed. The
user measures the received signal strength (RSS) [1], time
of arrival (ToA) [2], or angle of arrival (AoA) [3] to anchors
and infers its position in the environment. A typical system is
the global positioning system (GPS), which utilizes the satel-
lites as anchors to provide position information in outdoor
environments with an accuracy of several meters.
In some scenarios, for example fire rescue within a build-
ing, the global positioning is not possible, since anchors
may not be deployed or not functional due to the accident.
Therefore, relative positioning of users without any external
infrastructure is appealing, which is the focus of this paper. In
the context of relative positioning as shown in Fig. 1, all users
are considered as equal peers and are able to obtain the range
information of its neighbors if they are in communication
This work is supported by Temasek Lab under Indoor Relative Positioning
System project (No. IGDST1302024), National Science Foundation of
China (No. 61550110244, 61601381, and 61471306), and National Defense
Scientific Research of China (No. B3120133002).
R. Liu, C. Yuen, T. N. Do, and U-X. Tan are with the Engineer-
ing Product Development Pillar, Singapore University of Technology and
Design, 8 Somapah Rd, Singapore, 487372 {
ran liu, yuenchau,
trinhut
do, uxuan tan}@sutd.edu.sg.
D. Jiao and X. Liu are with the School of Software and Microelectronics,
Peking University, Beijing, China, 102600
xliu@ss.pku.edu.cn.
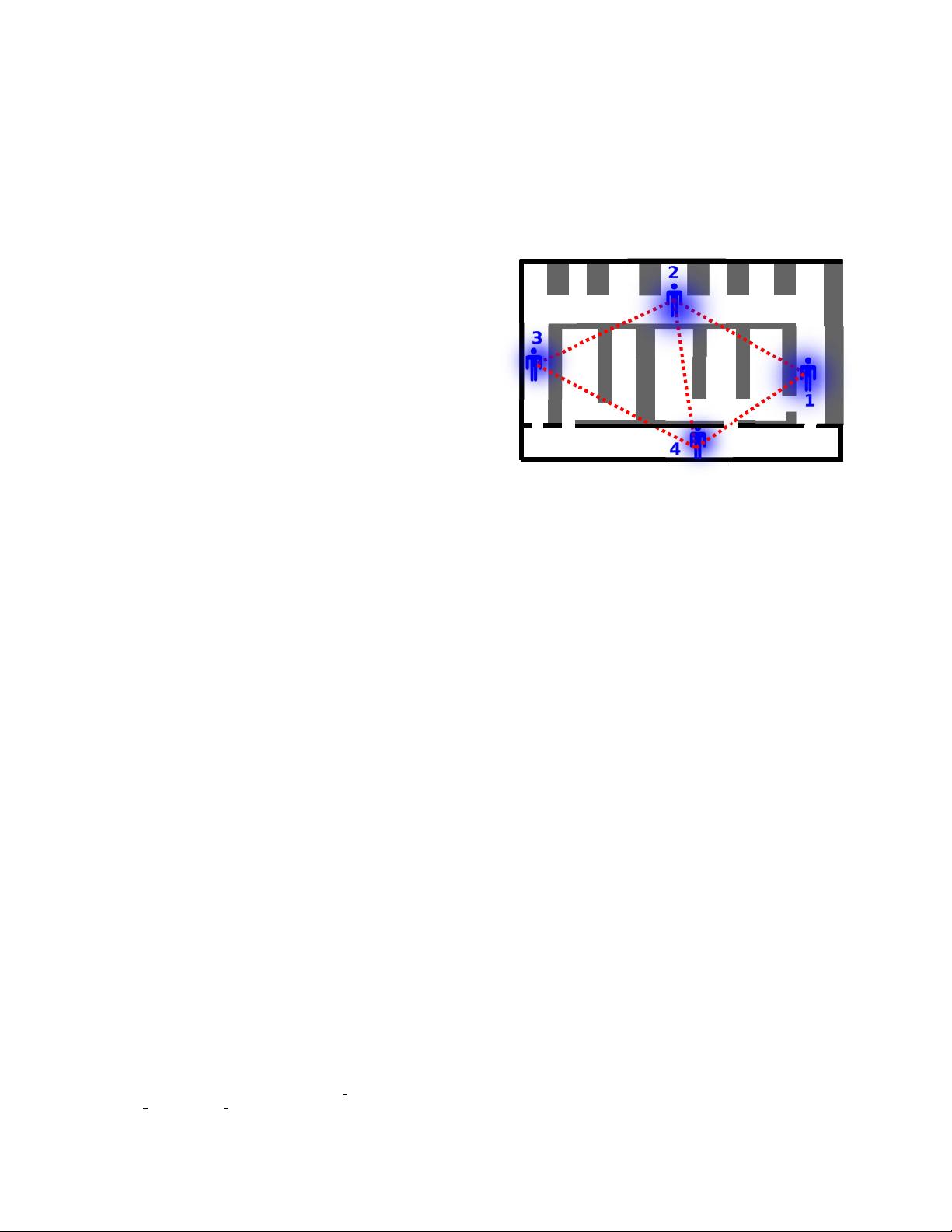
Fig. 1. Illustration of the relative positioning problem. We aim to
track the relative position of a group of mobile users by integrating the
inertial measurement provided by the IMU and the peer to peer ranging
measurement from the UWB. As our approach does not rely on any given
infrastructure, the environment is only used to validate our approach and
provide the ground truth. User1, User2, and User4 can range each other
using UWB, since they are close to each other. Due to the occlusion of the
concrete walls, User3 can not hear User1 through UWB. With the help of
IMU, we can cooperatively determine the relative positions of all users.
range. Additionally, the users carry inertial sensors, which
can measure their own movements. The goal is to determine
the relative position of all users in the network.
Dead reckoning (DR) [4] [5] determines one’s location
based on its previous position and speed, which is measured
by an IMU sensor or wheel encoder in the case of a mobile
robot. If the initial locations of the users are known, one
can use DR to determine the relative position of a group of
users. But the DR may not be accurate due to accumulative
error, which must be corrected or eliminated by other sources
of information. Anchors with known positions, for example,
can provide a measure to correct the positioning error, but
infrastructure-based anchors are not applicable in a number
of situations as mentioned previously. In this paper, we
propose using the peer to peer measurement to remove the
accumulative error for relative positioning estimation.
Many devices are able to provide peer to peer information,
for example camera, laser range finder, and wireless sensors.
Extensive research concerning relative positioning in a swam
behavior using vision or laser-based sensors have been done
in the area of robotics [6] [7]. The application of these
approaches are limited in uncontrolled environments, as it
is challenging for them to deal with the occlusions.
Due to the wide availability of RSS in many wireless
devices, a number of model-based or fingerprinting-based
techniques [8] [9] have been proposed to locate a device.
As compared to the visual-based sensors mentioned above,
the RSS is available even without line of sight. But the
2017 IEEE International Conference on Robotics and Automation (ICRA)
Singapore, May 29 - June 3, 2017
978-1-5090-4633-1/17/$31.00 ©2017 IEEE 5623
下载后可阅读完整内容,剩余6页未读,立即下载
128 浏览量
2019-07-13 上传
点击了解资源详情
2021-02-08 上传
2021-05-01 上传
2022-08-03 上传
Cooperative positioning for emergency responders using self IMU and peer-to-peer radios measurements
2021-02-08 上传
2019-05-13 上传
2021-10-04 上传

weixin_38520046
- 粉丝: 8
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
