摄像机定标:计算机视觉关键技术概述
需积分: 25 178 浏览量
更新于2024-07-18
收藏 375KB PDF 举报
计算机视觉中摄像机定标是关键技术,它涉及到如何从摄像机捕获的二维图像中推断出三维世界的信息。在《自动化学报》2000年第26卷第1期的一篇文章中,作者邱茂林、马颂德和李毅对该领域的研究进行了深入的综述。
文章首先介绍了引言部分,指出计算机视觉的核心任务之一就是利用摄像机图像来解析物体的三维几何结构,这依赖于摄像机的成像几何模型,包括焦距、视场角、内参矩阵等参数。这些参数的精确估计即摄像机定标,是整个计算机视觉系统的基础。早期在摄影测量学领域已有大量关于摄像机定标的研究,但由于计算机视觉的应用需求,近十多年间,学术界对此展开了广泛而深入的研究。
摄像机定标的方法多种多样,论文将其划分为不同的类别进行分析和比较。常见的方法有直接法,如基于特征点的法(如棋盘格法、特征匹配法)、自标定法(通过图像内部特征进行参数估计)、结构光法(利用结构化光源和相应的算法确定摄像机参数)以及基于物理模型的方法(如双目视觉、多视图几何)。每种方法都有其适用场景和优缺点,例如,直接法简单直观,但可能对环境和光照条件敏感;自标定法对光照变化适应性强,但需要足够丰富的内部特征。
文章还讨论了摄像机定标在计算机视觉中的应用特点。首先,摄像机定标是实时性和精度的关键,这对于自动驾驶、机器人导航、增强现实和虚拟现实等领域至关重要。其次,随着深度学习的发展,相机校准与深度估计、立体视觉和三维重建紧密相连,优化了三维重建的精度和效率。此外,摄像机定标还为相机网络、多视图融合和全景图像处理等提供了基础。
这篇综述不仅概述了摄像机定标的历史背景,还详细比较了不同方法的理论原理和实际应用,为计算机视觉研究人员提供了全面的参考框架。在未来的研究中,随着技术的不断进步,摄像机定标方法将继续发展和完善,以满足不断增长的计算机视觉应用场景的需求。
自动化学报000106
机坐标系与三维物体空间坐标系之间的线性变换关系,没有考虑成像时任何的非线性补偿问题并将相
应的参数引入约束方程.然而到后来,直接线性变换方法改进扩充到能包括这些非线性因素,并使用非
线性的手段求解时,直接线性变换方法这个术语却没有改变.这段说明指出了直接线性变换方法具有两
种含义,一种含义是直接通过求解一组线性方程得到摄像机的有关参数;另一种含义是求解的过程不
排除使用非线性优化算法.
直接线性变换方法是对摄影测量学中的传统方法的一种简化.尽管从得到的直接线性变换矩阵可以
求取摄像机的内部参数和外部参数,但也可以不必这样做.与摄影测量学中的传统方法相比,更符合计
算机视觉中应用问题的要求和所使用的CCD摄像机的特点,成为连接摄影测量学的计算机视觉之间的
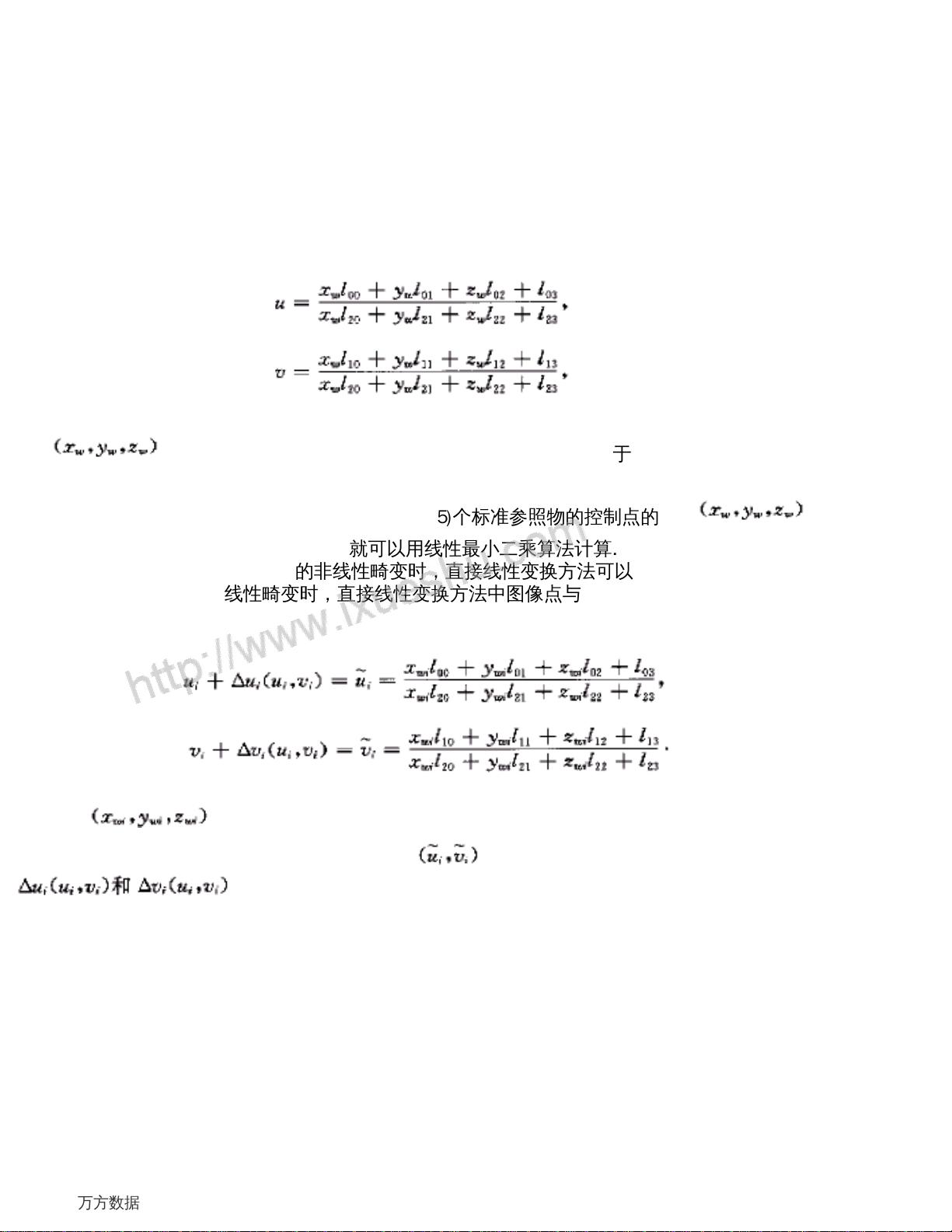
桥梁.两个领域都可以使用直接线性变换方法对摄像进行标定.直接线性变换方法所使用的模型是
其中 是三维物体空间中控制点的坐标,(u,v)是图像上对应于三维控制点的图像点的坐
标,l
ij
是直接线性变换方法的待定参数.
不失一般性,我们可以令l
23
=1.如果知道N(N>5)个标准参照物的控制点的坐标
及其对应的图像上的坐标(u,v),11个参数就可以用线性最小二乘算法计算.
当不考虑摄像机成像过程镜头的非线性畸变时,直接线性变换方法可以划分为我们下面将要讨论
的一类定标方法.当考虑非线性畸变时,直接线性变换方法中图像点与三维空间中控制点的对应关系则
是
在这里, 是标准参照物上的控制点坐标,且(u
i
,v
i
)是标准参照物上控制点对应的实际
图像坐标.这些图像点利用数字图像处理技术获得.
是校正后的图像点坐标.
是在图像点(u
i
,v
i
)处的镜头畸变校正.
由此我们可以看出,在直接线性变换方法中,非线性畸变因素的引入是非常方便的.
•Dainis•和•Juberts•在文[6]中给出了利用直接线性变换方法进行摄像机定标的结果,他们的
系统是为了准确的测量机器人的运动轨迹.该系统能够实时地测量出机器人的运动轨迹,但并不要求定
标算法对系统的标定是实时的.
2.2 利用透视变换矩阵的摄像机定标方法
从摄影测量学中的传统方法可以看出,刻划三维空间坐标系与二维图像坐标系关系的方程一般说
来是摄像机内部参数和外部参数的非线性方程.如果忽略摄像机镜头的非线性畸变并且把透视变换矩阵
中的元素作为未知数,给定一组三维控制点和对应的图像点,就可以利用线性方法求解透视变换矩阵
中的各个元素.
严格来说,基于摄像机针孔模型的透视变换矩阵方法与直接线性变换方法没有本质的区别,而且
透视变换矩阵与直接线性变换矩阵之间只相差一个比例因子.基于两者都可以计算摄像机的内部参数和
file:///E|/qk/zdhxb/zdhx2000/0001/000106.htm(第 3/13 页)2010-3-23 14:22:52
万方数据
剩余14页未读,继续阅读
110 浏览量
2021-09-28 上传
2021-09-28 上传
点击了解资源详情
130 浏览量
2021-09-30 上传
150 浏览量
点击了解资源详情
323 浏览量
2025-01-06 上传

YuanBster
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- NLP_practices:涉及日常实验室和作业
- HierarchicalComputerFileSystem:C ++程序,可模拟简单的分层计算机文件系统
- app开发之React Native教程合集.zip_zipapp lite
- Python二级编程题.zip
- laravel-web-to-pdf
- 大学物理实验目录及正文.rar
- v2ex-ios::globe_showing_Europe-Africa: v2ex - 创意工作者社区
- E-Comm-laravel
- 女性个人简历信息响应式网页模板
- 网上购物系统:AT Project Sem-5
- Python_ProgramingExperience_to_Pythonic。记录编程过程中遇到的一些问题和解决资料.zip
- tcbot:Tcbot 是 IRC 到 WoW Channel 桥接机器人
- lein-git-inject:Leiningen中间件,它在构建时从环境git上下文中计算“版本”(请考虑最新标签)
- grbl1.1f20170801-stm32f103c8t6
- 微信小程序Demo:小费计算器
- 《Python编程:从入门到实践》、《笨办法学Python》练习题.zip
