STM32多功能小车设计:蓝牙遥控与循迹功能
版权申诉
66 浏览量
更新于2024-06-29
1
收藏 704KB DOCX 举报
"基于STM32的多功能小车设计文档详细介绍了如何利用STM32F103微控制器实现一款具备循迹、蓝牙遥控、红外遥控和无线摇杆控制等功能的智能小车。文档涵盖了设计任务与要求、单元电路设计、测试结果、程序实现以及作者的收获与心得。"
STM32是意法半导体(STMicroelectronics)推出的基于ARM Cortex-M3内核的微控制器系列,以其高性能、低功耗和成本效益而受到广泛应用。在这款多功能小车的设计中,STM32F103作为主控芯片,负责处理各种传感器数据和控制电机动作。
1. **设计任务与要求**:
- 寻迹功能:确保小车能稳定地沿着单黑线行驶,避免偏离赛道。
- 红外遥控:通过红外遥控器进行小车的前进、后退、左转、右转等操作,支持连续按键控制。
- 蓝牙遥控:采用蓝牙模块作为从设备,手机作为主机,实现远程控制。
- NRF2401无线遥控:通过NRF2401无线通信模块,实现更远距离的遥控功能。
2. **单元电路设计**:
- **循迹模块**:可能采用了光敏传感器或磁性传感器,检测赛道上的黑白线变化,通过STM32处理信号以调整小车行驶方向。
- **驱动模块**:使用L298N电机驱动器,可同时驱动两个电机,具有四个逻辑驱动通道,为电机提供必要的控制信号和功率。
- **稳压模块**:为系统提供稳定的5V和7.8V电源,确保各个模块正常工作。
- **蓝牙模块**:可能使用了常见的蓝牙UART模块,与STM32通过串行接口通讯,实现无线连接。
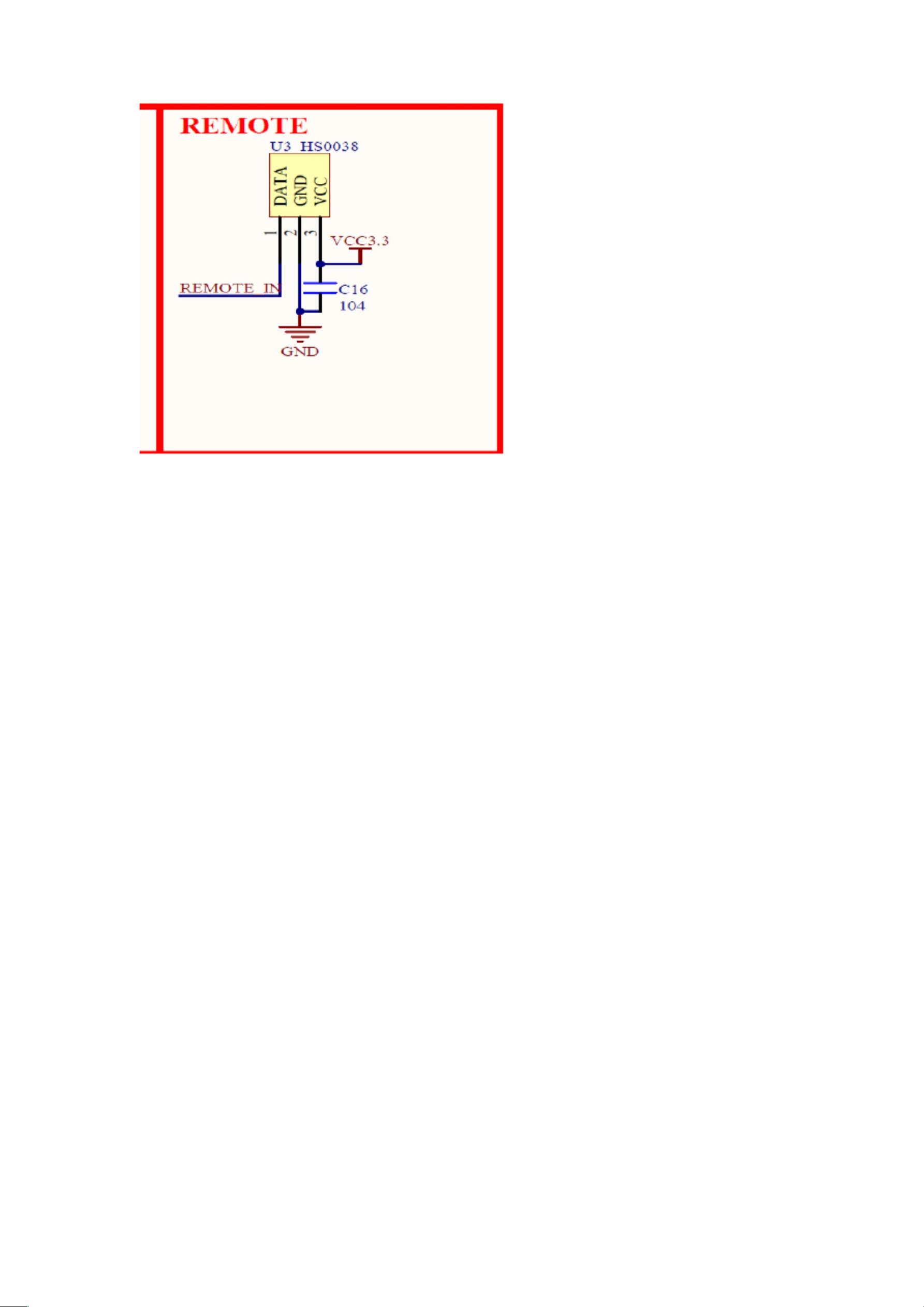
- **红外接收模块**:接收红外遥控器发出的信号,转换为数字信号供STM32解析。
- **无线摇杆遥控器**:可能包含NRF2401无线收发模块,通过左摇杆控制方向,右摇杆调节速度。
3. **测试结果**:
- 红外遥控功能正常,所有功能键响应良好,支持连续按键操作。
- 循迹模式在简单赛道上表现稳定,但面对较大弯度时需要调整速度。
- 蓝牙模式下,手机控制小车动作稳定,控制距离较远且无死角。
- 无线遥控模式下,摇杆控制方向效果佳,但速度控制受限于电机性能。
4. **程序实现**:
- 需要编写STM32的固件,包括IO输入输出模式设置、时钟配置、定时器应用、串口、ADC、SPI等接口的驱动程序。
5. **收获与心得**:
- 设计者通过该项目深入理解了STM32的使用,掌握了多个外围模块的配置和应用。
- 在实际操作中遇到了问题并解决了,如循迹效果优化、遥控器信号处理等,积累了实践经验。
这个项目为学习STM32的开发者提供了一个全面的实践案例,涵盖了硬件设计、软件编程以及实际应用测试的全过程。
6
剩余34页未读,继续阅读
2022-07-01 上传
2023-09-30 上传
2023-10-07 上传
2022-06-11 上传
2022-11-19 上传
2022-06-30 上传
2022-06-30 上传

G11176593
- 粉丝: 6917
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 迷宫商店
- lcdlibai,有趣的c语言源码,c语言项目
- perceiver-pytorch:在Pytorch中实现感知器(具有迭代注意的一般感知)
- Antena Zagreb Chrome Player-crx插件
- eslint-config
- python的学习笔记
- gerenciador-reservas
- wn21-discussion9-panjalee:wn21-discussion9-panjalee由GitHub Classroom创建
- 可二次开发MYSQLbishe015.zip
- 安迪兒美女報時-crx插件
- serv,c语言项目开源码,c语言项目
- imaqutils:为支持的图像采集设备查找硬件和创建对象的便捷功能。-matlab开发
- Python实用程序代码
- 附加功能:Node JS附加功能
- attentio-desk-app:使用Electron的Attentio桌面应用程序
- mocktail:免费,轻量级,可以运行带有漂亮界面的本地dockerized模拟服务器
