使用Unity3D陀螺仪构建VR相机
"Unity3D基于陀螺仪实现VR相机功能"
在Unity3D中,陀螺仪是一个强大的工具,它可以捕捉设备的旋转信息,从而在虚拟现实(VR)环境中提供更真实的头部追踪体验。本教程将指导你如何利用Unity的内置陀螺仪功能创建一个VR相机控制器。
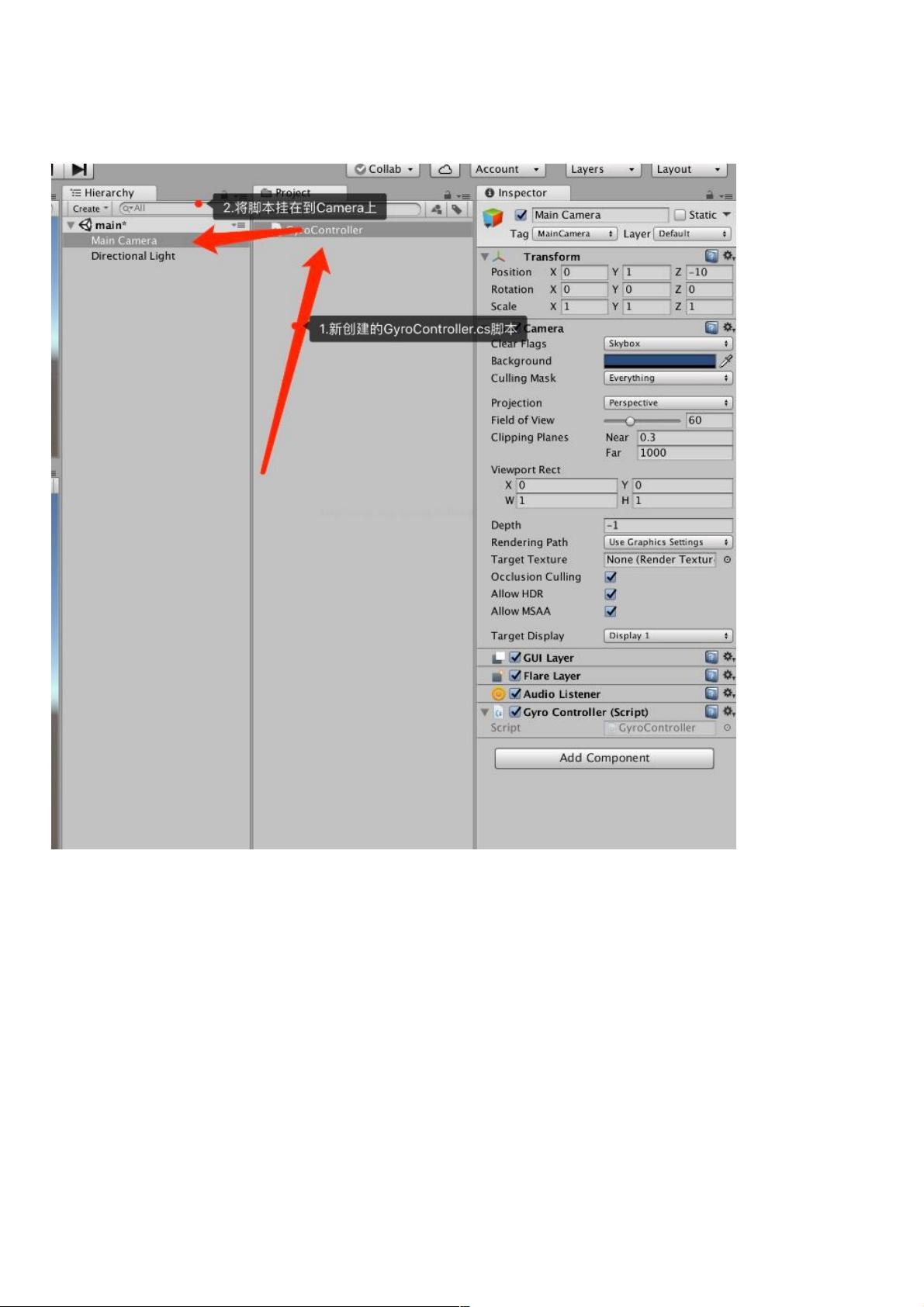
首先,我们需要创建一个新的C#脚本`GyroController.cs`,并将它附加到场景中的MainCamera游戏对象上。脚本中包含了一些关键字段,这些字段对于陀螺仪的校准和滤波至关重要:
1. `baseIdentity`: 这个四元数用于设置相机的基础朝向,通常设置为设备的默认朝向(例如,90度的Y轴旋转)。
2. `baseOrientation` 和 `baseOrientationRotationFix`: 这两个四元数用于存储设备的初始朝向和校准后的旋转。
3. `calibration` 和 `cameraBase`: 分别用于设备的校准和相机的基础旋转。
4. `gyroInitialRotation` 和 `initialRotation`: 存储陀螺仪启动时的旋转状态,用于初始化。
5. `gyroAvaiable` 和 `gyroEnabled`: 检查陀螺仪是否可用以及是否已启用。
6. `gyroOff`: 标记陀螺仪是否关闭。
7. `landscapeLeft` 和 `landscapeRight`: 用于处理横屏模式下的旋转。
8. `lowPassFilterFactor`: 低通滤波因子,用于平滑陀螺仪数据,减少抖动。
9. `offsetRotation` 和 `referanceRotation`: 用于计算和应用偏移旋转。
接下来,你需要在Update()函数中处理陀螺仪的数据更新。这里会涉及到对陀螺仪的读取、校准、滤波和应用到相机旋转的过程。例如,你可以使用`Input.gyro.attitude`获取陀螺仪的实时旋转,并结合`baseOrientation`进行调整。为了平滑数据,可以使用低通滤波,将新值与旧值按比例混合,减少快速旋转时的不稳定性。
此外,还要考虑设备的方向变化,如从横屏到竖屏的转换,这可能需要重新校准陀螺仪的参考方向。这可以通过检测设备方向变化并更新`referanceRotation`来实现。
最后,你需要在Start()函数中初始化陀螺仪,确保其可用并且启用。同时,你也需要在运行时监测陀螺仪的状态,以便在必要时关闭或重新启用它。
通过Unity的陀螺仪功能,我们可以创建一个响应性强且稳定的VR相机系统,提供给用户更加沉浸式的体验。这个过程涉及到了设备传感器的使用、数据处理和滤波技术,以及对Unity组件和游戏对象的操纵,是Unity VR开发中的一项基础技能。
Unity3D基于陀螺仪实现基于陀螺仪实现VR相机功能相机功能
Unity自带陀螺仪功能,今天就利用陀螺仪实现一个VR相机功能。步骤如下:
1、打开Unity,创建一个新的C#脚本GyroController.cs,并挂在MainCamera游戏对象上,如图:
代码如下:
using UnityEngine;
using System.Collections;
public class GyroController : MonoBehaviour
{
// Fields
private readonly Quaternion baseIdentity = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientation = Quaternion.Euler(90f, 0f, 0f);
private Quaternion baseOrientationRotationFix = Quaternion.identity;
private Quaternion calibration = Quaternion.identity;
private Quaternion cameraBase = Quaternion.identity;
private bool debug = true;
public static bool gyroAvaiable;
private bool gyroEnabled = true;
private Quaternion gyroInitialRotation;
public static bool gyroOff;
private Quaternion initialRotation;
private readonly Quaternion landscapeLeft = Quaternion.Euler(0f, 0f, -90f);
private readonly Quaternion landscapeRight = Quaternion.Euler(0f, 0f, 90f);
private const float lowPassFilterFactor = 0.1f;
下载后可阅读完整内容,剩余3页未读,立即下载
604 浏览量
2021-08-26 上传
点击了解资源详情
165 浏览量
点击了解资源详情
345 浏览量

weixin_38652058
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android MP3播放器开发教程:SD卡音乐全掌控
- 前端职训:美化并扩展打地鼠小游戏功能
- Neo4j与ElasticSearch集成教程与文件
- 升级版生命游戏开发体验:MFC与CButtonST类的应用
- 掌握不同版本ojdbc6.jar与ojdbc14.jar的差异及用途
- CHC软件:笔记本CPU降压节能降温绿色解决方案
- uni-app-tools:uniapp开发者的实用SDK工具库
- ADSelfService Plus实现高效AD域密码自助管理
- Struts2实现登录注册功能教程
- RobloxImageToScript工具:图像转换为Roblox脚本教程
- 宠物狗网站模版下载:精美图片,免费试用
- MVC权限管理Demo:结构分层与设计模式实践
- DsoFramer_V2.3.0.1源代码解析与技术细节
- VC 6.0中利用OpenCV实现视频显示与屏幕捕捉方法
- 快速制造铝合金消失模模具的工艺技术
- 组件游乐场:实时预览与编辑组件源的开源工具
