工控机驱动的常导中低速磁悬浮列车机械制动系统优化与设计
需积分: 6 10 浏览量
更新于2024-09-07
收藏 141KB DOC 举报
本文主要探讨的是基于工控机的常导中低速磁悬浮列车机械制动控制系统的设计与优化。磁悬浮列车作为一种先进的轨道交通系统,其机械制动在提高安全性和效率方面扮演着关键角色。传统的磁悬浮列车在设计上不仅考虑了电制动,还引入了机械制动和支撑滑块制动,以应对不同情况下的制动需求。
文章首先介绍了磁悬浮列车的基本概念和早期发展,特别是在2001年的实验线中,机械制动与电制动的结合展示了其重要性。然而,机械制动系统受外界环境影响较大,为了增强其可控性,研究人员引入了减速度控制方案,利用工控机、数控技术和数据采集技术进行集成。
机械制动系统的核心原理是采用气一液制动方式,通过比例阀、气液转换器和制动器协同工作。通过调整控制电流,可以精确控制制动器的油压,进而控制制动臂产生的夹持力。单个制动器的制动力足以应对磁浮列车的制动需求,而16台制动器的组合则能提供强大的制动力,确保列车在各种载重条件下都能实现有效的减速。
文章强调了在系统设计中的安全冗余,即在比例气压调节阀之外增设开关型电磁阀,以防止单一元件失效时影响制动性能。通过计算机的闭环控制,驾驶员可以根据所需减速度灵活操控制动过程,提升了驾驶的便利性和安全性。
建模部分未在提供的部分内容中详述,但可以推测,对机械制动系统的动态模型建立可能是为了进行仿真分析和优化控制策略。这可能包括对制动响应时间、制动力输出与减速度关系的数学表达,以及如何通过工控机实时处理传感器数据,根据实际运行条件调整制动参数。
总结来说,该文详细介绍了常导中低速磁悬浮列车的机械制动系统如何通过工控机实现自动化控制,强调了制动原理、控制策略以及系统安全性的提升。这对于磁悬浮列车的性能优化和可靠性保障具有重要意义。
基于工控机的常导中低速磁悬浮列车机械制动控制系统
1、前言
磁悬浮列车是一种轮轨非粘着传动、悬浮于轨道的新型轨道交通运输系统,
是介于铁路和航空之间的一种独特的运输方式。在 2001 年研制的第一辆常导
中低速磁悬浮列车实验线中,除了采用电制动以外,还设置了机械制动和支撑
滑块制动。实验表明,几种制动方式中,电制动和支撑滑块制动都达到很优的
效果。
为了达到更优的性能指标,对正在改型的第二辆常导中低速磁悬浮列车的
机械制动进行了改进。但是,机械制动受外界环境的影响很大,为了有条件地
改变制动力,有效地克服外界环境的影响,引入了减速度控制方案。本文利用
工控机、数控、数据采集等技术,对常导中低速磁悬浮列车的机械制动系统进
行了设计,实现了计算机控制的机械制动。整个制动系统由机械制动装置、工
控机、高速数据采集卡、开关量输入板、开关量输出板等组成,实现对常导中
低速磁悬浮列车机械制动的自动控制和监测。
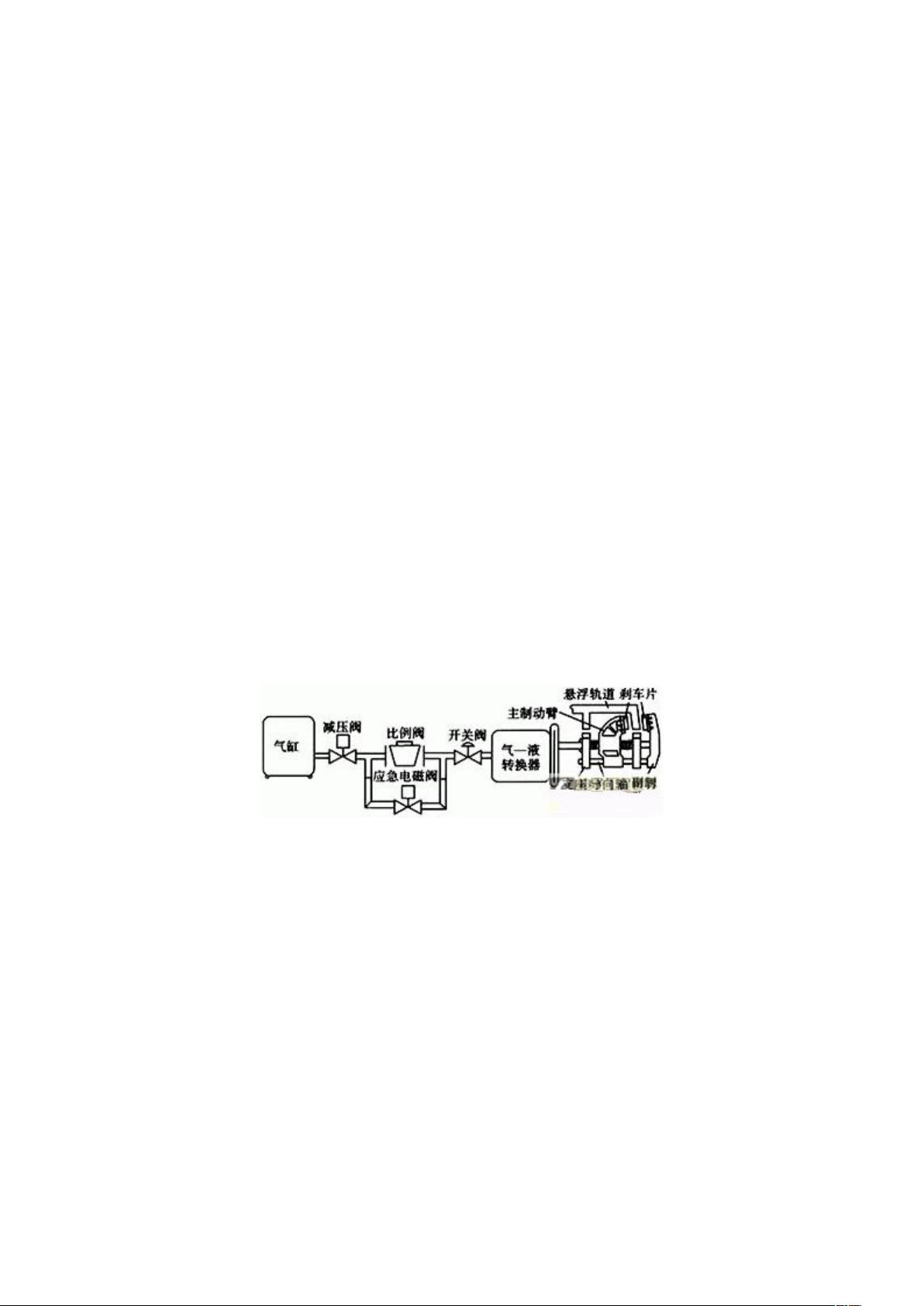
2、机械制动的制动原理
目前我校自行研制的改进型常导中低速磁悬浮列车的机械制动采用了气一
液制动方式,为了减小制动器的体积,制动的工作介质采用液压油。机械制动
气路结构如图 1 所示。
图 1 磁 悬 浮
列车机械制动
结构图
系统由比例阀、气液转换器、制动器组成。气压调节选用了电流型的比例
气压调节阀,其入口气压由恒压阀调节在 0.6MPa 左右。车辆的气液转换器的
最大增量气压设置为 0.4MPa,最大油压可以工作在 10MPa 左右,因此我们选
用转换比为 1∶25 的气—液转换器。当控制电流为 4~20mA 时,输出气压在 0
~0.4MPa 变化,制动器的制动油压相应在 0~10MPa 之间变化,每台制动器
的制动臂产生 0~9000N 的夹持力。如果摩擦片的磨擦系数在 0.3 左右时,单
台制动器的制动力可以大于 2500N。由于每辆车有 16 台制动器,共可产生大
于 40000N 的制动力,在磁浮车处于额定载重条件下(总重 30t 时),仅机械
制动即可产生大于 1.3m/s2 的减速度效果。
为了保证车辆在比例气压调节阀失效或需要紧急制动的情况下,仍然能够
完成制动目的,在比例气压调节阀侧还并联了一个开关型电磁阀,作为应急控
制之用。
因此,通过调节比例阀的电流就可以改变制动器的制动力,从而得到制动
下载后可阅读完整内容,剩余3页未读,立即下载
121 浏览量
2020-10-21 上传
121 浏览量
2022-06-20 上传
114 浏览量
2021-09-18 上传
2021-08-08 上传
2021-09-18 上传
2021-10-12 上传

weixin_38743506
- 粉丝: 352
 我的内容管理
展开
我的内容管理
展开







最新资源
- 普天身份证阅读器新版二次开发包发布
- C# 实现文件的数据库保存与导出操作
- CkEditor增强功能:轻松实现图片上传
- 掌握DLL注入技术:测试工具使用与探索
- 实现带节假日农历功能的jQuery日历选择器
- Spring循环依赖示例:深入理解与Git代码仓库实践
- ABB PLC液压阀门控制程序开发指南
- 揭秘4核旋风密版626象棋引擎的超牛实力
- HTML5实现的经典游戏:小霸王坦克大战源码分享
- 让Visual Studio兼容APM硬件信息的方法
- Kotlin入门:创建我的第一个应用
- Android语音识别技术研究报告与应用分析
- 掌握JavaScript基础:第8版教程源代码解析
- jQuery制作动态侧面浮动图片广告特效教程
- Android PinView仿支付宝密码输入框源码分析
- HTML5 Canvas制作的围住神经猫游戏源码分享
