"TI-TCAN4420.pdf: CAN收发器功能解析与控制逻辑详解"
67 浏览量
更新于2024-01-17
4
收藏 1.2MB PDF 举报
The TI-TCAN4420.pdf document provides detailed information on the CAN transceiver model TI-TCAN4420, which is a highly integrated device suitable for use in automotive and industrial applications. The transceiver features include TXD, RXD, VCC, GND, Polarity Control, SWCAN, HCAN, Dominant Time Out, OverTemp. DRIVER, UnderVoltage Mode and Control Logic, Bias Unit Logic Output, and VIO, as well as copyright information indicating the document is the property of Texas Instruments Incorporated. The document is part of the ProductFolder, which contains comprehensive information about the TI-TCAN4420 transceiver, including the option to OrderNow, access to TechnicalDocuments, and tools for further support and development. The detailed content of the document provides engineers and designers with the necessary information to understand, integrate, and utilize the TI-TCAN4420 transceiver in their systems, ensuring reliable and efficient performance in CAN communication applications.
6
TCAN4420
ZHCSH93 –DECEMBER 2017
www.ti.com.cn
Copyright © 2017, Texas Instruments Incorporated
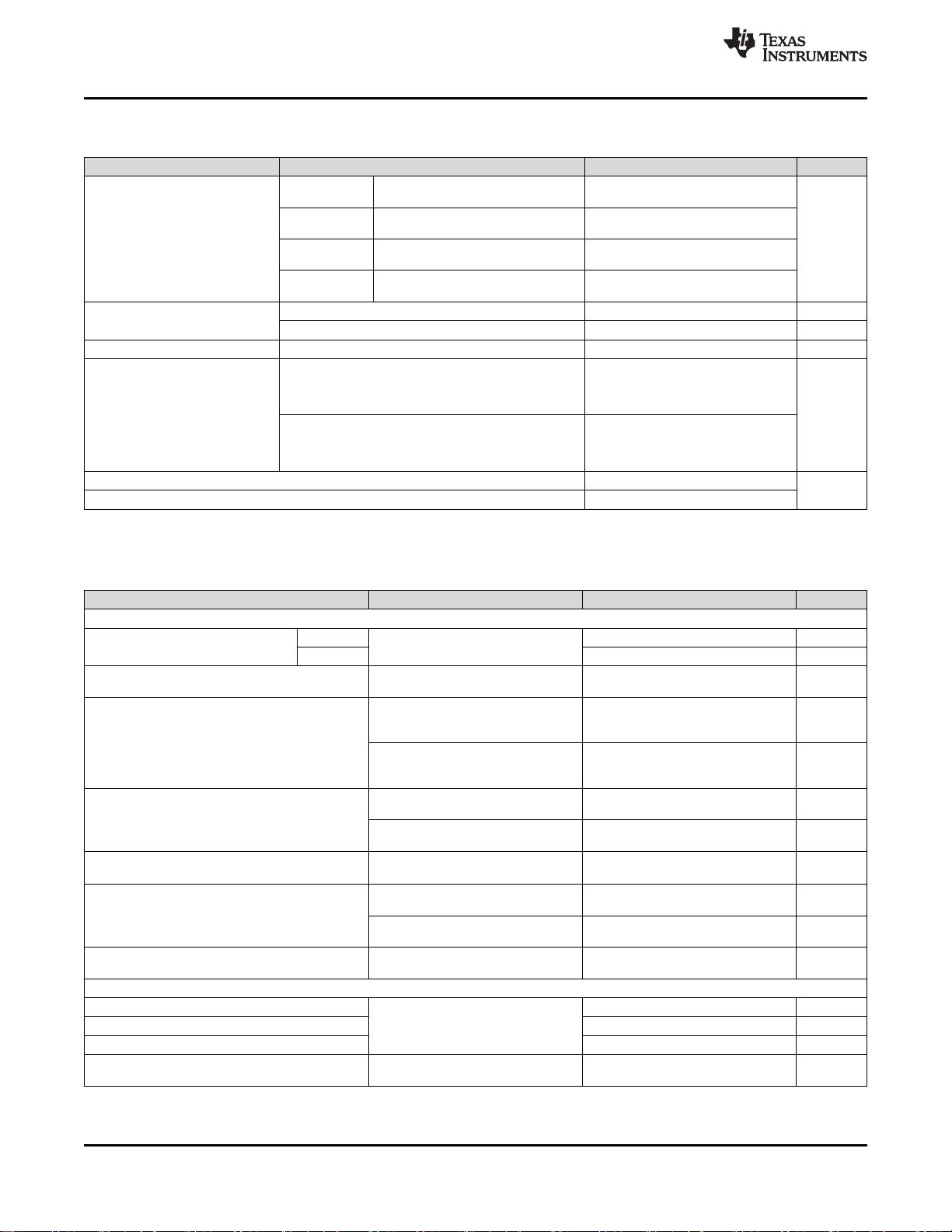
6.6 Power Supply Characteristics
over operating free-air temperature range (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
I
CC
Supply Current Normal
Mode
Dominant
See 图 6, TXD = 0 V, R
L
= 60 Ω, C
L
=
open,
55 70
mA
Dominant
See 图 6, TXD = 0 V, R
L
= 50 Ω, C
L
=
open,
60 80
Dominant with
bus Fault
See 图 6, TXD = 0 V, STBx = 0 V, CANH
= –25 V, R
L
= open, C
L
= open
100 180
Recessive
See 图 6, TXD = V
CC
, R
L
= 60 Ω, C
L
=
open, R
CM
= open, S or STB = 0 V
10 20
UV
VCC
Under voltage detection on V
CC
for protected mode 3.5 4.4 V
Hysteresis voltage 200 mV
UV
VIO
Under voltage detection on V
IO
for protected mode 1.3 2.7 V
P
D
Average Power
Dissapation
V
CC
= V
IO
= 5 V, T
J
= 25℃, R
L
= 60 Ω, Input to TXD at 250
kHz, 25% duty cycle square wave, C
L_RXD
= 15 pF. Typical
CAN operating conditions at 500 kbps with 25% transmission
(domiant) rate.
115
mW
V
CC
= V
IO
= 5.5 V, T
J
= 150℃, R
L
= 50 Ω. Input to TXD at
500 kHz, 50% duty cycle square wave, C
L_RXD
= 15 pF.
Typical high load CAN operating conditions at 1 Mbps with
50% transmission (domiant) rate and loaded network.
268
Thermal Shutdown Temperature 185
℃
Thermal Shutdown Hysterisis 15
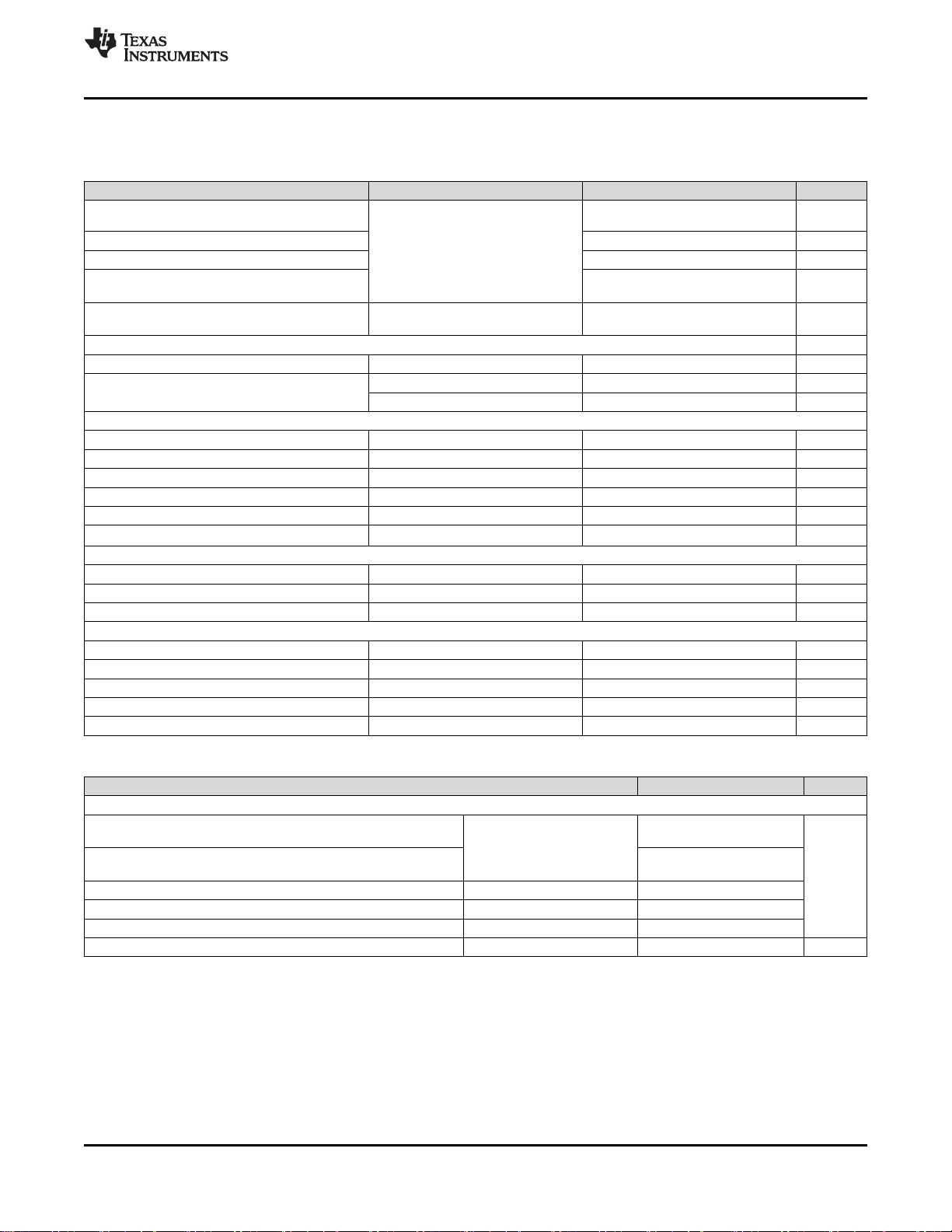
6.7 AC and DC Electrical Characteristics
All typical values are at 25°C and supply voltages of V
CC
= 5 V. R
L
= 60 Ω over operating free-air temperature range (unless
otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Driver Electrical Characteristics
V
O(D)
Bus output voltage
(dominant)
CANH
See 图 8 and 图 9, TXD = 0 V, R
L
= 60 Ω,
C
L
= open, R
CM
= open
2.75 4.5 V
CANL 0.5 2.25 V
V
O(R)
Bus output voltage (recessive)
See 图 6 and 图 9, TXD = V
CC
, R
L
= open
(no load), R
CM
= open
2 0.5 x V
CC
3 V
V
OD(D)
Differential output voltage (dominant)
See 图 6 and 图 9, TXD = 0 V, 50 Ω ≤ R
L
≤ 65 Ω, C
L
= open, R
CM
= open
4.75 V ≤ V
CC
≤ 5.25 V
1.5 3 V
See 图 6 and 图 9, TXD = 0 V, 50 Ω ≤ R
L
≤ 65 Ω, C
L
= open, R
CM
= open
4.5 V ≤ V
CC
≤ 5.5 V
1.3 3.2 V
V
OD(R)
Differential output voltage (recessive)
See 图 6 and 图 9, TXD = V
CC
, R
L
= 60
Ω, C
L
= open, R
CM
= open
–120 12 mV
See图 6 and 图 9,TXD = V
CC
, R
L
= open,
C
L
= open, R
CM
= open
–50 50 mV
V
SYM
Output symmetry (dominant or recessive)
(V
CC
- V
O(CANH)
- V
O(CANL)
)
See 图 6 and 图 9, R
L
= 60 Ω, C
L
= open,
R
CM
= open
–400 400 mV
I
OS(DOM)
Short-circuit steady-state output current,
Dominant
See 图 6 and 图 12, V
(CAN_H)
≤ –5 V,
CANL = open, TXD = 0 V
–115 mA
See 图 6 and 图 12, V
(CAN_L)
= 40 V,
CANH = open, TXD = 0 V
115 mA
I
OS(REC)
Short-circuit steady-state output current,
Recessive
See 图 6 and 图 12, –27 V ≤ V
BUS
≤ 32 V,
V
BUS
= CANH = CANL
–5 5 mA
Receiver Electrical Characteristics
V
IT
Input threshold voltage
See 图 10
500 900 mV
V
HYS
Hysteresis voltage for input threshold 120 mV
V
CM
Common Mode Range –12 12 V
I
IOFF(LKG)
Power-off (unpowered) bus input leakage
current
CANH = CANL = 5 V, V
CC
to GND via 0
Ω
5 µA
剩余31页未读,继续阅读
286 浏览量
261 浏览量
2022-11-14 上传
2022-12-16 上传
2022-12-16 上传
2022-12-16 上传
2022-12-16 上传
122 浏览量
119 浏览量

不觉明了
- 粉丝: 8301
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
