基于MSP430F169的光电跟踪伺服系统设计
35 浏览量
更新于2024-08-28
2
收藏 267KB PDF 举报
"四象限探测器光电跟踪伺服系统的研究"
本文主要探讨了四象限探测器光电跟踪伺服系统的实现方法,该系统旨在精确地跟踪光电目标。系统的核心是利用MSP430F169单片机进行信号采集、处理和控制,以确保伺服系统能有效地调整电机转速,从而实现目标物体的追踪。
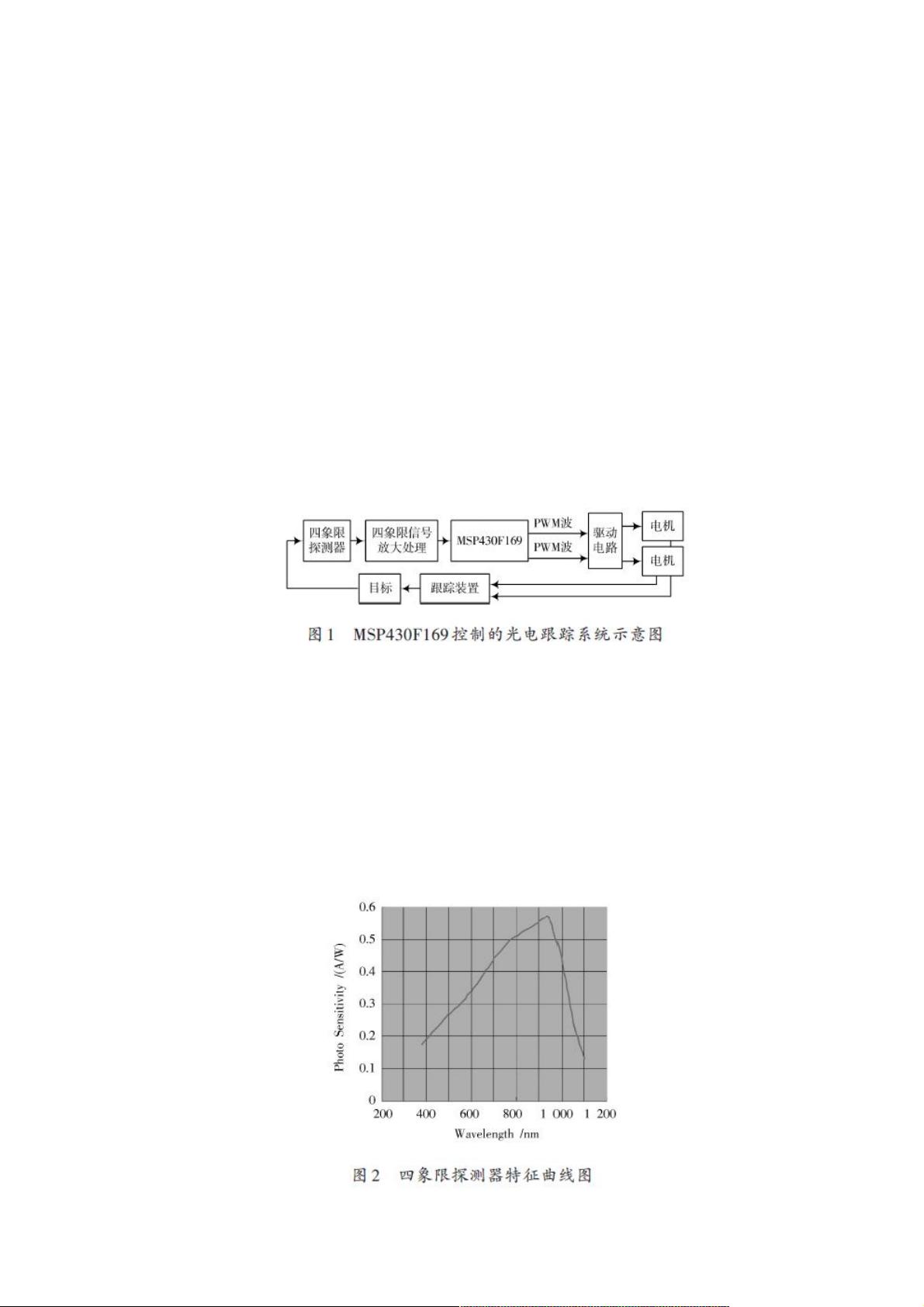
四象限探测器是系统的关键组件,它能够检测到380~1100nm范围内的光线,并在940nm波长时达到峰值响应。这种探测器的感光面被划分为四个象限,当光斑位于中心时,各象限接收的光强相同,以此来确定目标的位置。如果光斑偏离中心,不同象限的光强差异会产生误差信号,通过计算这些信号,可以计算出目标相对于探测器的偏移,进而调整电机的转动以保持对目标的跟踪。
MSP430F169单片机因其高集成度、丰富的内置模块(如12位ADC和16位定时器)和低功耗而被选为系统控制器。它负责执行AD采集,对采集到的信号进行滤波处理,消除噪声并提高信号质量。然后,单片机通过PID算法来计算出控制电机转速所需的指令。PID算法结合了比例、积分和微分三个元素,以实现快速、稳定且无振荡的跟踪性能。此外,MSP430F169的时钟功能用于生成PWM波,通过改变PWM波的占空比来精确控制电机的转速,从而实现对目标的精确跟踪。
伺服系统的工作流程包括以下几个步骤:首先,四象限探测器收集目标的光信号;然后,这些信号被MSP430F169的ADC转换成数字信号;接着,经过滤波处理,减少信号中的噪声和干扰;随后,PID算法计算出电机的控制信号;最后,通过PWM控制电机的转动,使跟踪装置能够沿着两个独立的轴向调整位置,实现空间旋转跟踪。
由于MSP430F169的低功耗特性,整个系统可以设计得更为紧凑和轻便,适合于需要长时间运行或移动应用的场合。通过这种方式,系统能够实现高精度的光电跟踪,适用于各种应用场景,例如天文观测、安防监控、太阳能跟踪系统等。
四象限探测器光电跟踪伺服系统通过巧妙地结合四象限探测器、MSP430F169单片机以及PID控制策略,实现了高效、精确的光电目标跟踪。这一技术的广泛应用潜力在于其能够在复杂环境中稳定地定位和追踪目标,为各个领域的自动化和智能化提供强有力的技术支持。
四象限探测器光电跟踪伺服系统的研究四象限探测器光电跟踪伺服系统的研究
摘要:为了实现光电跟踪目标,用四象限探测器检测目标物,利用单片机MSP410F169的AD采集,将采集到的
信号进行滤波,利用PID算法,以及单片机MSP410F169的时钟控制PWM波的占空比来调节电机的转速。通过
两个电机来实现跟踪装置的空间旋转跟踪目标物。 0 引言 MSP430 单片机具有集成度高、嵌入模块多
(如12位ADC、16位定时器等)、超低功耗等特点,在许多领域内得到了广泛的应用。对于一个伺服系统,要
经过信号的采集、转换、信号数字处理、信号控制等环节来完成指定任务。信号的采集过程和处理是一个重要
的环节,基于MSP430 光电跟踪伺服系统,一方面利用MSP430 单片机外
摘要:为了实现光电跟踪目标,用四象限探测器检测目标物,利用单片机MSP410F169的AD采集,将采集到的信号进行
滤波,利用PID算法,以及单片机MSP410F169的时钟控制PWM波的占空比来调节电机的转速。通过两个电机来实现跟踪装
置的空间旋转跟踪目标物。
0 引言
MSP430 单片机具有集成度高、嵌入模块多(如12位ADC、16位定时器等)、超低功耗等特点,在许多领域内得到了广
泛的应用。对于一个伺服系统,要经过信号的采集、转换、信号数字处理、信号控制等环节来完成指定任务。信号的采集过程
和处理是一个重要的环节,基于MSP430 光电跟踪伺服系统,一方面利用MSP430 单片机外设多的特点,尽可能使用一片芯
片,实现信号的采集、定时处理、PID算法、PWM 驱动,实现高精度测量的跟踪,另一方面,利用低功耗的特点实现小型
化。
1 光电跟踪的基本原理
MSP430F169控制的光电跟踪伺服系统示意图如图1所示,其特点是采用MSP430F169作为中央处理单元和控制器。
系统通过一个四象限光电探测器,其可探测到的波长范围是380~1 100 nm,当波长为940 nm时,输出的光功率达到峰
值。四象限探测器特性曲线图如图2 所示。四象限探测器的感光面的对称中心与直角坐标的零点O 重合,其正交方向分别对应
x 和y 坐标轴,并将感光面划分为四个象限阵元,四象限探测器原理示意图如图3所示。根据跟踪光斑在四象限的感光量不
同,可以计算出跟踪目标的偏差。当跟踪光斑中心与四象限中心重合时,对应着探测器的每个象限接收到的光信号强度相等,
经计算处理后得到的偏差信号,即误差信号为零,以确定跟踪对准。根据四象限探测器的特点,四象限接收到光信号后转换成
四路电流信号输出,通过I-V 转换电路,将电流信号转换成四路电压信号Ex1 ,Ex2 ,Ey1 ,Ey2 ,将电压信号进行滤波及放大处
理,利用MSP430F169内部的AD转换器采集数据,将采集到的电压信号经运算并归一化处理,然后采用自适应PID 算法,计
算出坐标偏移量Δx 和Δy ,并通过定时器产生PWM波的占空比来调节电机的速度,使电机能够平缓地到达目标位置。
2 硬件部分设计
硬件电路结构可分为:电源模块、控制模块、四象限探测器与成像模块、信号预处理、驱动电路等部分。
下载后可阅读完整内容,剩余4页未读,立即下载
2020-11-06 上传
2020-10-20 上传
2021-09-04 上传
2020-08-10 上传
2021-01-19 上传
2020-10-20 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38603259
- 粉丝: 5
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
