CAN总线入门详解:从基础到协议
需积分: 10 110 浏览量
更新于2024-08-01
收藏 1.87MB PDF 举报
"CAN入门书总线的介绍"
这篇资源是一本关于CAN总线的入门书籍,主要针对初学者,详细介绍了CAN 2.0的相关知识。CAN,全称为Controller Area Network,是一种国际标准化的串行通信协议,尤其在汽车行业中广泛应用。由于现代汽车电子控制系统的需求,如安全性、舒适性、环保和成本控制,CAN总线应运而生,旨在减少线束数量,实现多系统间的高效通信。
1. **CAN的应用示例**
CAN总线不仅在汽车领域得到广泛使用,还被应用于工业自动化、医疗设备、航空航天和楼宇自动化等多个领域。它能够有效地连接并控制各种电子设备,实现分布式系统之间的高效数据交换。
2. **总线拓扑图**
CAN总线通常采用两种拓扑结构:总线型和星型。总线型拓扑中,所有节点都直接连接到一条公共传输介质上;星型拓扑则是通过中央集线器将各个节点连接起来,提供更高的可靠性。
3. **CAN的特点**
- **错误检测与恢复**:CAN协议具备强大的错误检测和恢复机制,包括位错误检测、错误帧的发送等。
- **仲裁机制**:CAN采用非破坏性仲裁,允许节点同时发送数据,通过比较ID决定优先级。
- **位填充**:为防止连续相同位导致信号失真,CAN协议规定每五个连续相同的位后插入一个相反的位。
- **灵活的数据长度**:CAN支持不同长度的数据帧,可以适应不同应用场景的需求。
4. **CAN协议的基本概念**
包括帧的种类(数据帧、遥控帧、错误帧、过载帧)、位时序、同步机制以及错误处理等。数据帧用于传输实际数据,遥控帧用于请求数据,错误帧表示通信中出现的问题,过载帧用于延长总线空闲时间,帮助网络同步。
5. **CAN协议与标准规格**
ISO11898和ISO11519-2是两个重要的CAN标准,前者定义了物理层和数据链路层的规范,后者更关注车载网络的通信需求。它们在位时序、错误处理等方面存在差异,但都确保了CAN网络的可靠运行。
6. **错误状态和计数值**
CAN节点有多种错误状态,如主动错误、被动错误等,错误计数值则用于监测节点的错误状态,当超过一定阈值时,节点会进入错误被动或故障状态。
7. **硬件同步和再同步**
硬件同步是指节点通过物理层接收信号来同步其内部时钟;再同步是当接收的位与预期位不匹配时,调整接收器的采样点,确保正确接收后续位。
该入门书籍详细地介绍了CAN总线的基本概念、特点、协议以及相关标准,是学习和理解CAN通信协议的良好起点,尤其适合对CAN技术感兴趣的初学者。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 8 of 48
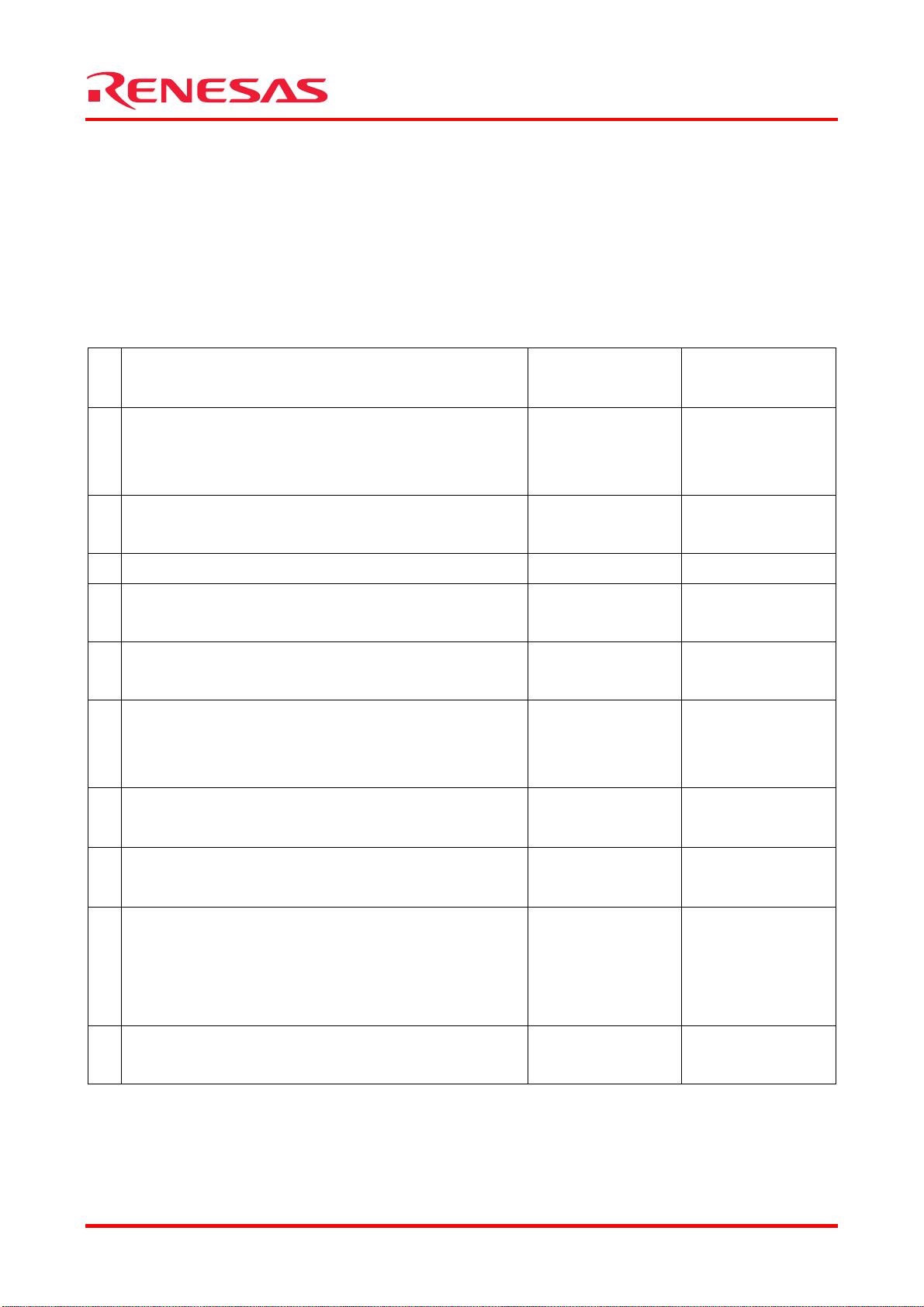
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
174 浏览量
2021-11-16 上传
2014-05-02 上传
2018-04-26 上传
2010-06-06 上传

xiaohui2356
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
