STM32驱动W24Q16 SPI闪存:三种工作模式解析
35 浏览量
更新于2024-09-02
收藏 527KB PDF 举报
"STM32驱动W24Q16涉及了如何在STM32单片机上操作W24Q16这款16Mbit的SPI Flash存储芯片。W24Q16通过SPI接口与STM32进行通信,但提供了三种不同的SPI工作模式:标准SPI、双SPI和正交SPI(QuadSPI)。每种模式在数据传输速度和引脚使用上有差异,正交SPI模式提供最快的读取速度,但需要更多的管脚。"
在STM32驱动W24Q16的过程中,首先要了解芯片的SPI接口工作方式。标准SPI模式是最基础的,包含CS、CLK、DI和DO四个引脚,WP和HOLD有其特定功能。双SPI模式中,DI和DO变为双向IO线,使用IO1和IO2,而WP和HOLD依然保留功能。正交SPI模式则使用全部信号线,数据线增加到4个,此时WP和HOLD不再具有原功能。
传输效率是不同SPI模式的主要区别。例如,读取数据时,虽然命令和地址的发送相同,但在数据传输阶段,第一种模式需要8个时钟周期输出一字节,第二模式只需4个,而第三模式仅需2个。这种差异意味着在相同时间内,正交SPI模式能更快地读取数据,但硬件连接更为复杂。
W24Q16的内存组织结构包括块、扇区和页三级。每个块为64KB,由16个4KB的扇区组成,每个扇区又包含16个256字节的页。这样的设计便于执行诸如擦除和写入等操作,因为擦除通常是以块或扇区为单位进行的,而写入则是以页为单位。
芯片内部有两个寄存器,用于存储状态信息。其中一个寄存器的第0位指示芯片当前是否处于忙碌状态,这对于写操作尤为重要,因为写操作之前必须等待芯片完成当前操作才能避免数据冲突。
在实际驱动开发中,STM32需要初始化SPI接口,配置相应的GPIO引脚,设置SPI模式,并编写控制代码来发送读写命令、地址和数据。此外,还需要处理等待时间、错误检测以及对芯片状态寄存器的读取,确保正确无误地执行读写操作。在进行写操作时,需要注意先检查芯片是否忙,以防止数据丢失或损坏。
总结来说,STM32驱动W24Q16的关键在于理解和应用不同的SPI模式,掌握内存布局以优化存取效率,并熟悉芯片的状态管理,从而实现高效、可靠的通信和数据存储。
stm32驱动驱动W24Q16
W24Q16是FLASH存储芯片,容量为16Mbit。注意是16Mbit,其实就是2M-byte。W24Q16采用的是spi总线。
但是这个spi总线有三种方式。
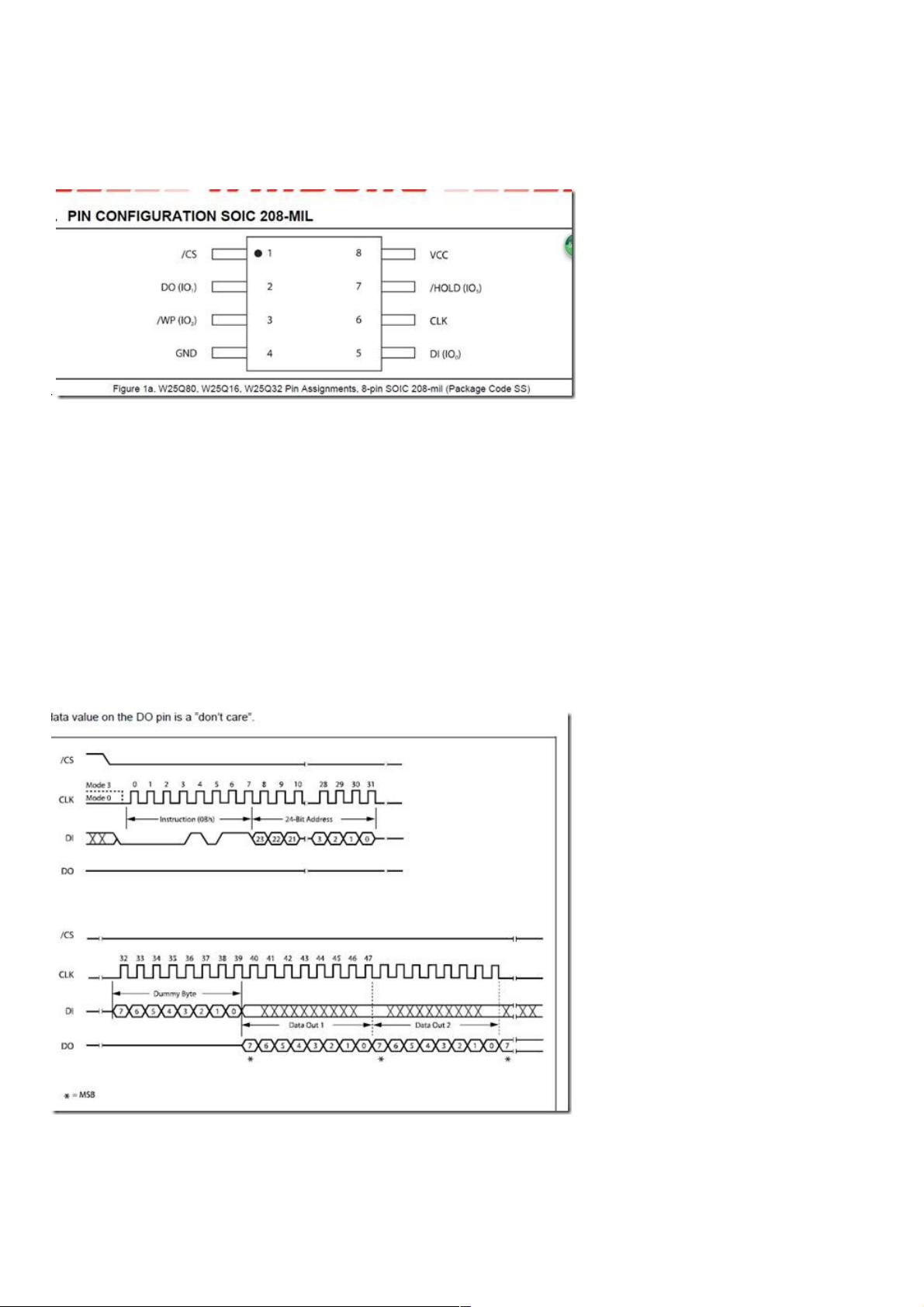
首先列下该芯片的管脚图:
第一种是标准spi(Standard)。即传统的四根线,CS片选信号,clk时钟信号,DI数据输入信号,DO数据输出信号。这个时
候,WP和HOLD有自己的功能。
第二种是双SPI模式(Dual SPI)。这个时候还是用到4根线,CS片选信号,clk时钟信号,不过这里的DI和DO变成双向的IO
线了,即用到了IO1和IO2。这个时候,WP和HOLD还是有自己的功能。
第三种是正交SPI模式(Quad SPI,这里暂且这么翻译)。这个时候会用到6根线,即所有信号线都使用了。CS片选信
号,clk时钟信号,这个还是一样,不过变化的是,数据线用到了4个,IO0-IO3。所以这个时候,WP和HOLD本身的功能就没有
了。
看看这三种模式的传输有什么区别。
其实三个都是用的SPI协议,即首先要CS片选有效,然后在clk的时钟下,发送数据和接收数据,不同的只是信号线的使用。
看看时序图,以读数据为例
第一种
第二种
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-11-14 上传
2006-03-16 上传
2023-05-19 上传
2010-04-29 上传
162 浏览量

weixin_38577648
- 粉丝: 3
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
