Python实现的相机标定及其评价方法
版权申诉
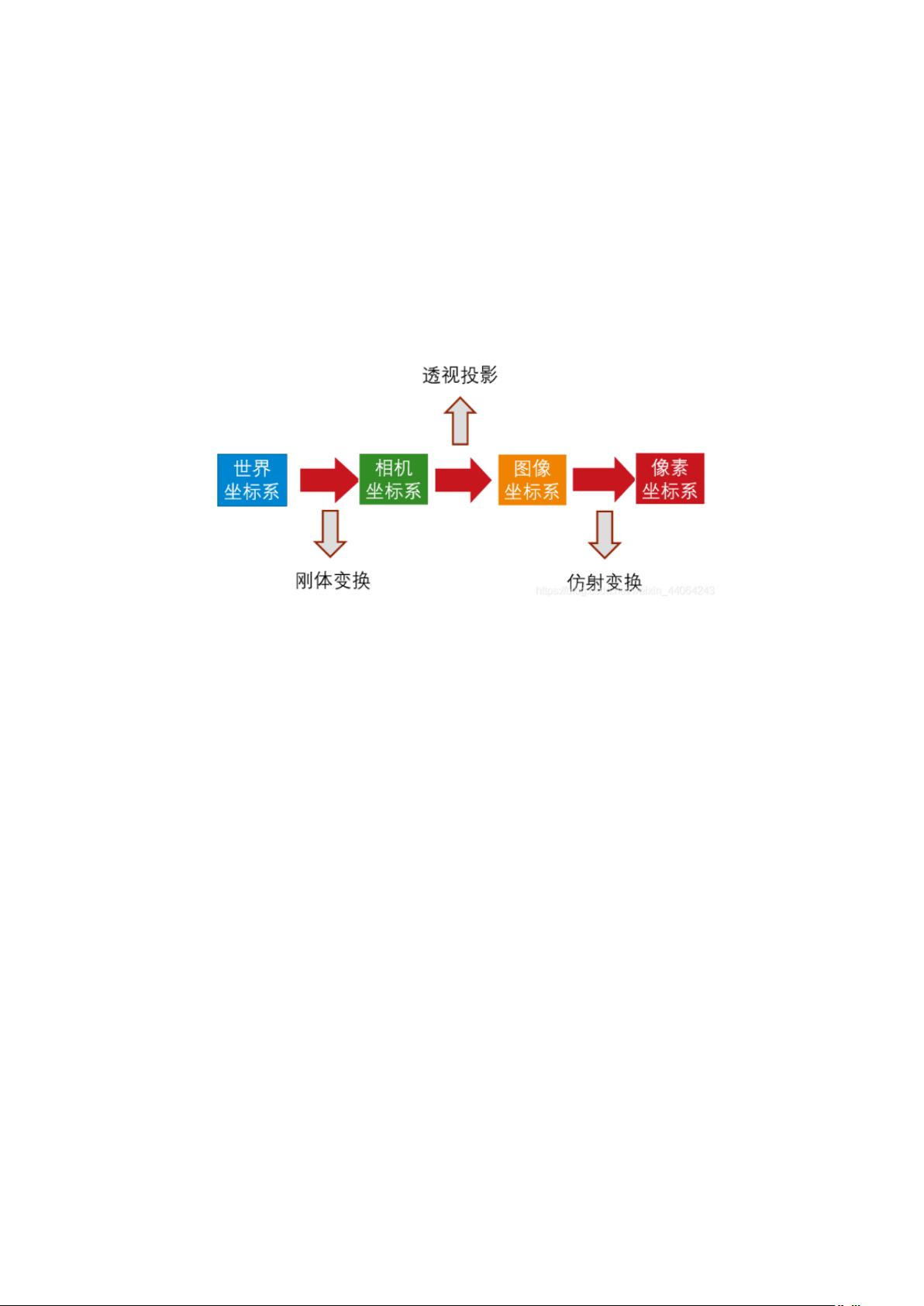
"基于Python的相机标定是一种利用计算机视觉技术,通过编程实现摄像机内部参数(如焦距、主点、视场角等)和外部参数(如旋转和平移矩阵)的估计过程。相机标定的核心是理解相机成像原理,涉及四个坐标系:世界坐标系、相机坐标系、图像坐标系和像素坐标系。
首先,相机标定的原理涉及到相机成像的数学模型,它描述了从世界坐标系到像素坐标系的变换过程。相机标定的目标是找出这些参数,以便于进行图像校正和三维重建。标定的主要目的是消除图像的畸变,并能将三维世界点映射到二维图像上。
在标定过程中,最常用的是平面标定法,它通过拍摄一张带有均匀间距格子的标定板(如棋盘格),从不同角度获取一系列图片。关键步骤包括:选择标定板作为特征点源,检测图像中的角点,然后根据已知的标定板几何尺寸和世界坐标系信息,将像素坐标转换为物理坐标。接着,通过这些数据,运用最小二乘法估计内参数矩阵(包括焦距、主点等),以及外参数矩阵(包括旋转和平移矩阵),形成投影矩阵。
最后,为了考虑相机的径向畸变,可能还需要进一步估计畸变系数,这通常通过极大似然法来优化估计精度。完成标定后,可以用于校正图像畸变,提高成像质量,并且能够将三维点准确地映射到图像上,这对于机器视觉、机器人导航和三维重建等领域至关重要。
总结起来,基于Python的相机标定是一系列科学计算和图像处理技术的结合,通过编程实现了摄像机模型的精确建模,是现代计算机视觉和机器人技术的基础之一。"
基于 python 程序设计语言的相机标定
一、相机标定的原理
(一)相机如何成像
相机成像系统中,共包含四个坐标系:世界坐标系、相
机坐标系、图像坐标系、像素坐标系。相机成像的原理:
1.世界坐标系
世界坐标系也称为测量坐标系,是一个三维直角坐标系,
以其为基准可以描述相机和待测物体的空间位置。世界坐标
系的位置可以根据实际情况自由确定。
2.相机坐标系
相机坐标系也是一个三维直角坐标系,原点位于镜头光
心处,X、Y 轴分别与相面的两边平行,Z 轴为镜头光轴,与
像平面垂直。
3.像素坐标系
像 素 坐 标 系 是 一 个 二 维 直 角 坐 标 系 , 反 映 了 相 机
CCD/CMOS 芯片中像素的排列情况。原点位于图像的左上角,
轴、轴分别于像面的两边平行。像素坐标系中坐标轴的单位
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐





hunter206206
- 粉丝: 559
 我的内容管理
展开
我的内容管理
展开







最新资源
- 英语词根词缀学习:掌握词汇的秘密武器
- Linux内核补丁应用指南
- 深入解析ASP.NET底层架构:Web请求的流转与处理
- EJB3.0初学者教程:从入门到实践
- Ajax入门到精通:基础教程与实战应用
- 微机原理课件:第四章汇编语言基础
- Linux系统与参考手册:C++编程指南
- C语言在嵌入式系统编程中的应用与技巧
- C#委托与事件深入解析
- 撰写优秀论文的策略与技巧
- Hibernate EntityManager 3.3.0.GA 用户指南
- 数字图像处理基础:从采集到理解
- 锐捷802.1x协议详解:客户端认证与扩展功能
- 探索HP-UX 11i在PA-RISC架构下的技术细节与内部原理
- Struts框架深度解析与实战指南
- Delphi 2007与AJAX技术结合的Web开发探索
