STM32驱动的智能自动往返小车设计:模糊控制与PWM应用
版权申诉
92 浏览量
更新于2024-06-29
收藏 730KB DOCX 举报
本篇设计报告详细介绍了湖南科技大学信息与电气工程学院的学生如何运用STM32F103微控制器为核心,开发一款自动往返电动小汽车的控制系统。该系统采用了嵌入式技术,特别是ARM Cortex-M3架构的STM32系列处理器,这反映了当前智能化发展中对于小型、高效和功能强大的微控制器的需求。
设计的关键组件包括反射式红外传感器用于路面黑线检测,利用PWM(Pulse Width Modulation)技术精确控制电动机的速度,实现小汽车在直线行驶时的动态调速、急刹车、停车和倒车等功能。模糊控制算法被用来优化速度调节,结合PWM脉宽调制技术,确保了车辆位置的高精度控制和恒速运行。
MATLAB仿真在此过程中起到了重要作用,通过仿真验证了系统的性能,特别是在速度变化平滑性的方面。STM32F103的选择不仅因其高性能、低功耗,还因为其丰富的外设和良好的成本效益,使得它在汽车电子、工业控制、医疗器械和玩具等领域有着广泛的应用前景。
在整个系统设计中,学生充分展示了他们的理论知识和实践能力,实现了小车自动记录往返时间、行驶距离,并通过蜂鸣器提示返回起点的功能。这不仅是一次技术实验,也是对学生工程实践能力和系统集成能力的锻炼。
总结来说,这篇报告深入探讨了STM32F103在自动往返电动小汽车控制中的应用,强调了其在现代嵌入式系统设计中的核心地位,以及模糊控制算法和PWM技术在提高系统性能中的关键作用。通过这个项目,学生们不仅掌握了STM32的使用,也提升了他们解决实际问题的能力和创新思维。
运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过
LCD 显示器实时显示小车运动参数;配置 STM32F103 通用定时器为 PWM 输出
模式产生 PWM 波,通过步进调节 PWM 波占空比参数控制电机的转速。
第一章 系统方案论证与分析
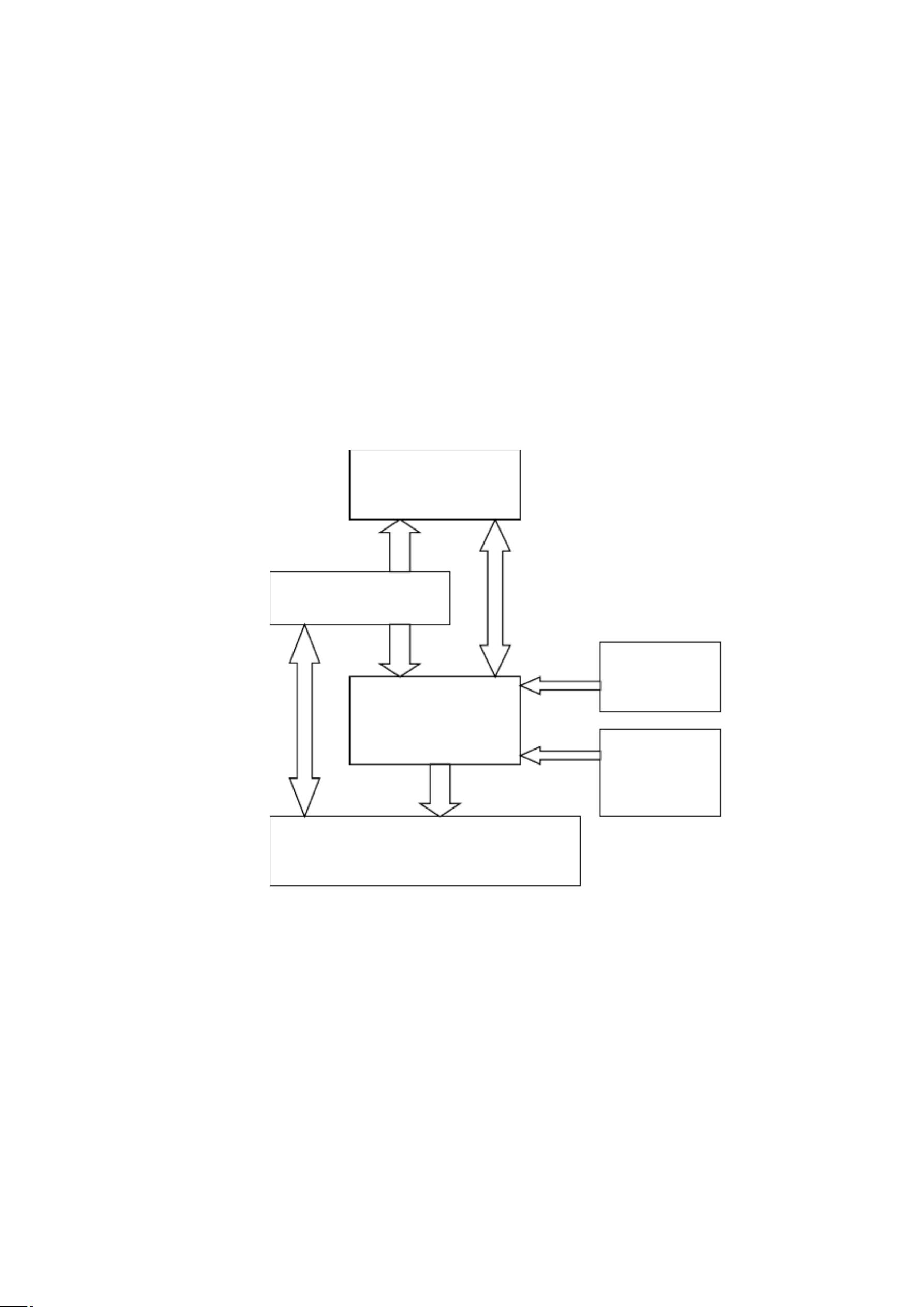
根据题目中的设计要求,本系统主要由主控单片机模块、电源模块、电机驱
动模块、黑线检测模块、测速模块以及液晶显示模块构成。本系统的方框图如下
图所示:
电源模块
STM32
黑 线 检 测 模
块
1、 主控单片机
根据题目要求,控制器主要用于控制电机的运动,黑线的检测以及相关信息
的显示。对于控制器的选择主要有以下两种方案:
方案一:采用 51 系列单片机作为控制器。51 系列单片机应用广泛,技
术成熟,但是运行速度慢,内部资源较少,且只有2 个定时计数器,不满足题目
要求。
方案二:采用 STM32 作为控制器。基于 Cortex- M3 内核的 STM32F10x 系
列芯片是新型的 32 位嵌入式微处理器,其性能优良,移植性好,提高了对直流
1
剩余14页未读,继续阅读
2022-06-25 上传
2022-06-22 上传
2022-06-25 上传
2022-06-27 上传
2021-09-13 上传
2023-02-22 上传

G11176593
- 粉丝: 6870
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
