模糊自适应PID控制在球杆系统中的应用研究
需积分: 37 99 浏览量
更新于2024-08-08
收藏 326KB PDF 举报
"球杆系统的控制方法研究 (2009年) - 彭秀艳,宫彬 - 哈尔滨工程大学自动化学院"
本文主要探讨了球杆系统的控制方法,这是一种具有非线性特性和不稳定性的问题。球杆系统中的小球在导轨上的滚动动态行为非常复杂,因此对它的精确控制是一项挑战。作者通过建立球杆系统的数学模型,旨在简化这个复杂的动态过程,并从中获取系统的传递函数。
传递函数是控制系统理论中的一个重要概念,它描述了一个系统输入与输出之间的关系,对于理解和设计控制器至关重要。作者基于所建立的数学模型,设计了一种模糊自适应PID控制器。PID(比例-积分-微分)控制器是一种广泛应用的反馈控制策略,它可以自动调整其参数以适应系统的变化,而模糊逻辑则为控制器提供了处理不确定性及非线性问题的能力。
模糊自适应PID控制器的引入,是为了克服传统PID控制器可能存在的局限性,特别是在应对球杆系统这种非线性系统的控制时。在Matlab的Simulink环境中进行的仿真试验,验证了该控制器的设计效果。仿真结果表明,模糊自适应PID控制器能够更有效地应用于球杆系统的控制,提高了系统的稳定性和性能。
关键词涉及到的主要知识点包括:
1. **球杆系统**:这是一个非线性不稳定系统,其动态特性复杂,通常用于测试和研究控制理论。
2. **数学模型**:系统建模是理解和控制动态系统的首要步骤,通过模型可以揭示系统行为并为控制器设计提供基础。
3. **传递函数**:控制理论中的关键工具,描述输入信号如何转化为输出信号,有助于控制器设计。
4. **模糊自适应PID控制器**:结合了模糊逻辑和PID控制的优点,能自适应地调整参数以优化控制性能。
5. **Matlab Simulink**:一个强大的仿真平台,常用于控制系统设计和分析,能直观展示控制器的效果。
6. **仿真试验**:在设计控制器后,通过仿真来验证其性能和可行性,这是理论研究与实际应用之间的桥梁。
该研究论文深入研究了球杆系统的控制问题,采用模糊自适应PID控制器解决了非线性系统的控制挑战,并通过Matlab Simulink的仿真验证了控制器的有效性,为类似系统的控制设计提供了参考。
第 卷第 期
应 用 科 技
Vol
年 月 AppliedScienceandTechnology Dec
doi jissn X
球 杆 系 统 的 控 制 方 法 研 究
彭秀艳宫彬
哈尔滨工程大学 自动化学院黑龙江 哈尔滨
摘要球杆系统是一个典型的非线性不稳定系统其中小球在导轨上滚动过程的动态描述十分复杂通过建
立球杆系统的数学模型简化后得到了整个球杆系统的传递函数根据传递函数设计模糊自适应PID 控制器
在 Matlab 中的 Simulink 环境下进行仿真试验来验证控制器设计效果通过仿真可以看出模糊自适应 PID 控制
更适于球杆系统的控制
关键词球杆系统数学模型模糊自适应控制
中图分类号TP 文献标识码A文章编号 X
Research of ball and beam system s control method
PENG XiuyanGONG Bin
College of Automation Harbin Engineering University Harbin China
Abstract Ball and beam system is a typical nonlinear instable system and the dynamic description of the ball
rolling on the rails is very complicatedThe systems transfer function is got through the establishment and simpli
fying of the systems mathematical modelThe fuzzy selfadaptive PID controller is designed according to the trans
fer functionThe controller performance is tested through simulation in the Matlab Simulink environment drawing
the conclusion that fuzzy selfadaptive control system is better than other methods in ball and bean system s con
trol
Keywordsball and beam systemmathematical modelfuzzy selfadaptive control
收稿日期
作者简介彭秀艳 女 教授博士主要研究方向系统建模预报及随机控制Emailpengxiuyanhrbeueducn
球杆系统是一个典型的多变量的非线性不稳
定系统是非线性控制理论的一个典型实验室课题
该系统通过电机操作驱动力矩的控制使刚性球稳定
在连杆的指定位置
通过建立球杆系统的数学
模型根据模型设计控制器并进行参数整定达到使
小球稳定在指定位置的控制目的
系统建模
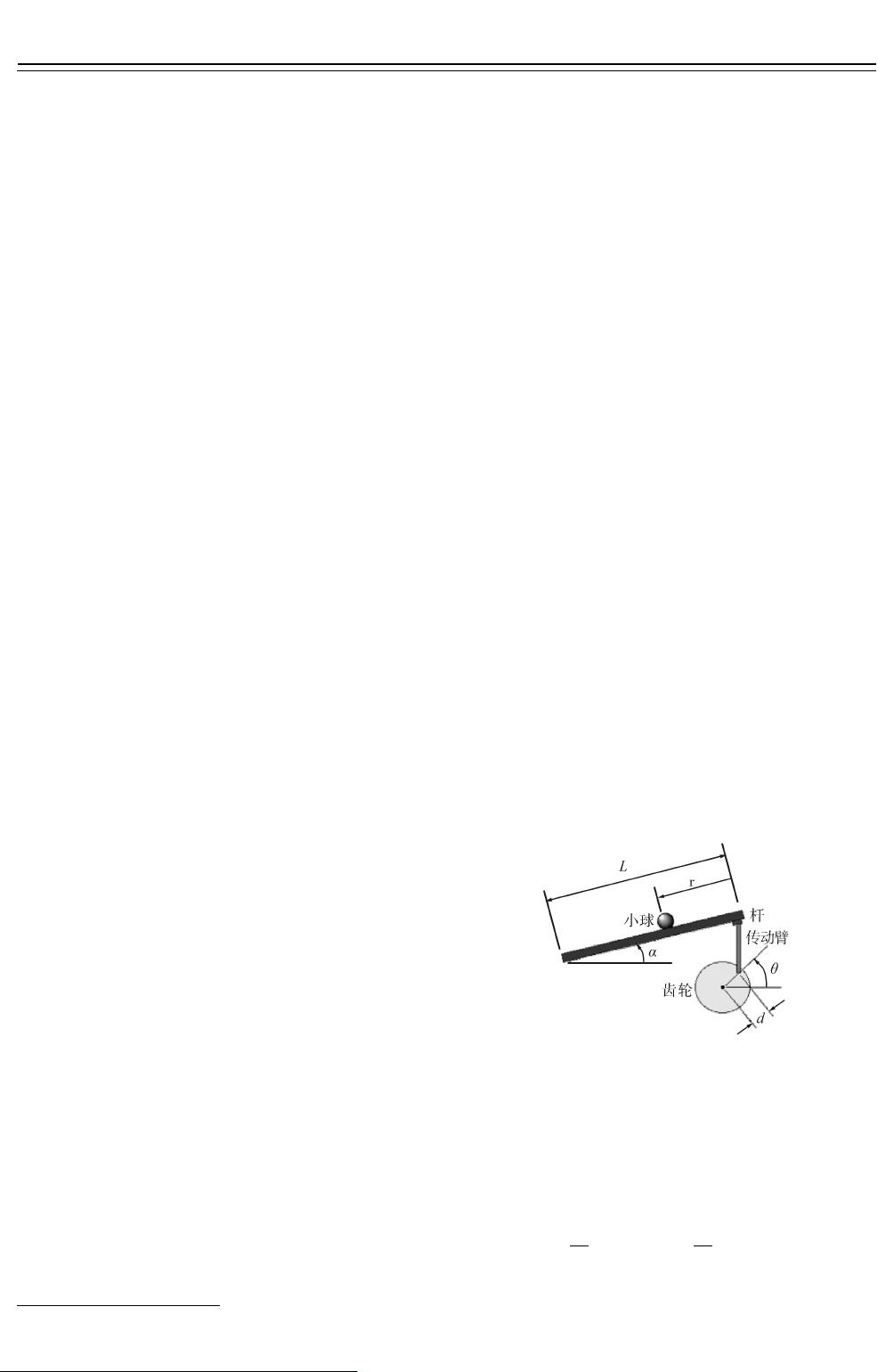
所用的球杆系统的机械结构如图 所示球杆
系统是一个典型的非线性系统其执行机构具有很
多非线性特性包括死区直流马达和带轮的传动
非线性位置测量的不连续性导轨表面不是严格的
光滑表面产生的非线性阻力对小球在导轨上滚动
的动态过程的完整描述是非常复杂的建模的目的
是对于该控制系统给出一个相对简单的模型
图 球杆系统机械结构图
根据拉格朗日方程设质量为 m 的刚体在直角
坐标系下的位置为xy 该坐标与广义坐标的关
系为x r cosy r sin这样求出小球沿广义
坐标 r 方向运动的动能如下
V
x
y
r
r
小球绕径向转动的动能为
下载后可阅读完整内容,剩余3页未读,立即下载
308 浏览量
183 浏览量
232 浏览量
272 浏览量
2021-09-26 上传
370 浏览量
232 浏览量
180 浏览量
101 浏览量

weixin_38689041
- 粉丝: 1
- 资源: 963
 我的内容管理
展开
我的内容管理
展开







最新资源
- 2009年凌阳最新的芯片选型参考资料
- domino URL命令
- E3Guide e3:tree的开发指南
- Serv-U FTP的建立和维护手册(PDF)
- 基于S3C2440的嵌入式LINUX系统移植的研究与实现
- 基于ARM的嵌入式视频监控系统客户端设计实现
- LINUX操作系统实时性的分析与改进策略
- windows xp sp2不是提供远程桌面共享-远程计算机已结束连接
- SQL21自学通edit
- STM32硬件设计手册
- ubuntu_pocket_guide_and_reference.8109283240.pdf
- More Effective C++(中文版).pdf
- as3.0组件详细使用与开发教程
- 你必须知道的495个C语言问题
- Flex ActionScript 3.0 Cookbook 中文版
- 学习jsp自定义标签
