平衡滤波算法:整合加速计与陀螺仪测量
需积分: 10 103 浏览量
更新于2024-07-24
收藏 553KB PDF 举报
"这篇文档介绍了平衡滤波算法,也称为互补滤波算法,它主要用于姿态融合,例如在平衡平台中的应用。文档中还涉及到卡尔曼滤波等高级滤波技术。"
平衡滤波算法是一种简单但有效的解决方案,用于集成加速度计和陀螺仪的测量数据,以实现对平衡平台的稳定控制。该算法在机器人和无人机等领域广泛应用,因为它能够有效地融合两种传感器的输出,弥补它们各自的不足。
加速度计:
加速度计测量的是单位质量上的力(F=ma,因此a=F/m)。在重力作用下,它可以用来检测地球引力的方向。在正常情况下,一个2轴加速度计的X轴读数为0g,Y轴读数为-1g,表示垂直向下。通过分析加速度计在不同倾斜角度下的读数,可以确定设备的倾斜状态。然而,Y轴的读数对于小角度变化的敏感度较低,且不依赖于倾斜方向,因此在某些情况下可能不是非常有用。
陀螺仪:
陀螺仪则测量角速度,即旋转的速度。当设备静止时,其读数为零;设备旋转时,读数会变为正或负,指示旋转方向。陀螺仪对于检测快速动态变化非常敏感,但它不能提供长期的稳定性信息,因为陀螺仪的漂移会导致长期误差积累。
读取传感器值:
获取传感器数据的第一步是通过模拟到数字转换器(ADC)读取模拟输入,并将其转换为可用单位。这个过程需要进行偏置和尺度校正:偏置很容易找到,只需要观察传感器在静止状态下的读数;而尺度校正则需要知道传感器的最大量程,以便将模拟值映射到实际物理量。
滤波过程:
平衡滤波器的基本思想是结合加速度计和陀螺仪的输出。加速度计可以提供静态平衡信息,而陀螺仪可以跟踪动态变化。由于加速度计易受噪声和漂移影响,陀螺仪则随着时间积累误差,通过互补滤波,可以动态调整两者的权重,从而获得更准确的姿态估计。
卡尔曼滤波:
在更复杂的系统中,可能会使用卡尔曼滤波来进一步提高融合效果。卡尔曼滤波是一种统计滤波方法,能够考虑传感器之间的相关性和不确定性,提供最优的数据融合。它需要知道系统的动态模型和噪声特性,通过预测和更新步骤,不断优化状态估计。
平衡滤波算法是通过智能融合不同传感器数据来提高系统性能的关键技术。理解和应用这种算法,不仅可以提升平衡平台的稳定性,也能为其他需要姿态估计的应用提供有价值的参考。
A bit more about the accelerometer…
If it was necessary to have an estimate of angle for 360º of rotation, having the Y-axis
measurement would be useful, but not necessary. With it, we could use trigonometry to find the
inverse tangent of the two axis readings and calculate the angle. Without it, we can still use sine
or cosine and the X-axis alone to figure out angle, since we know the magnitude of gravity. But
trig kills processor time and is non-linear, so if it can be avoided, it should.
For a balancing platform, the most important angles to measure are near vertical. If the platform
tilts more than 30º in either direction, there’s probably not much the controller can do other than
drive full speed to try to catch it. Within this window, we can use
small angle approximation
and the X-axis to save processor time and coding complexity:
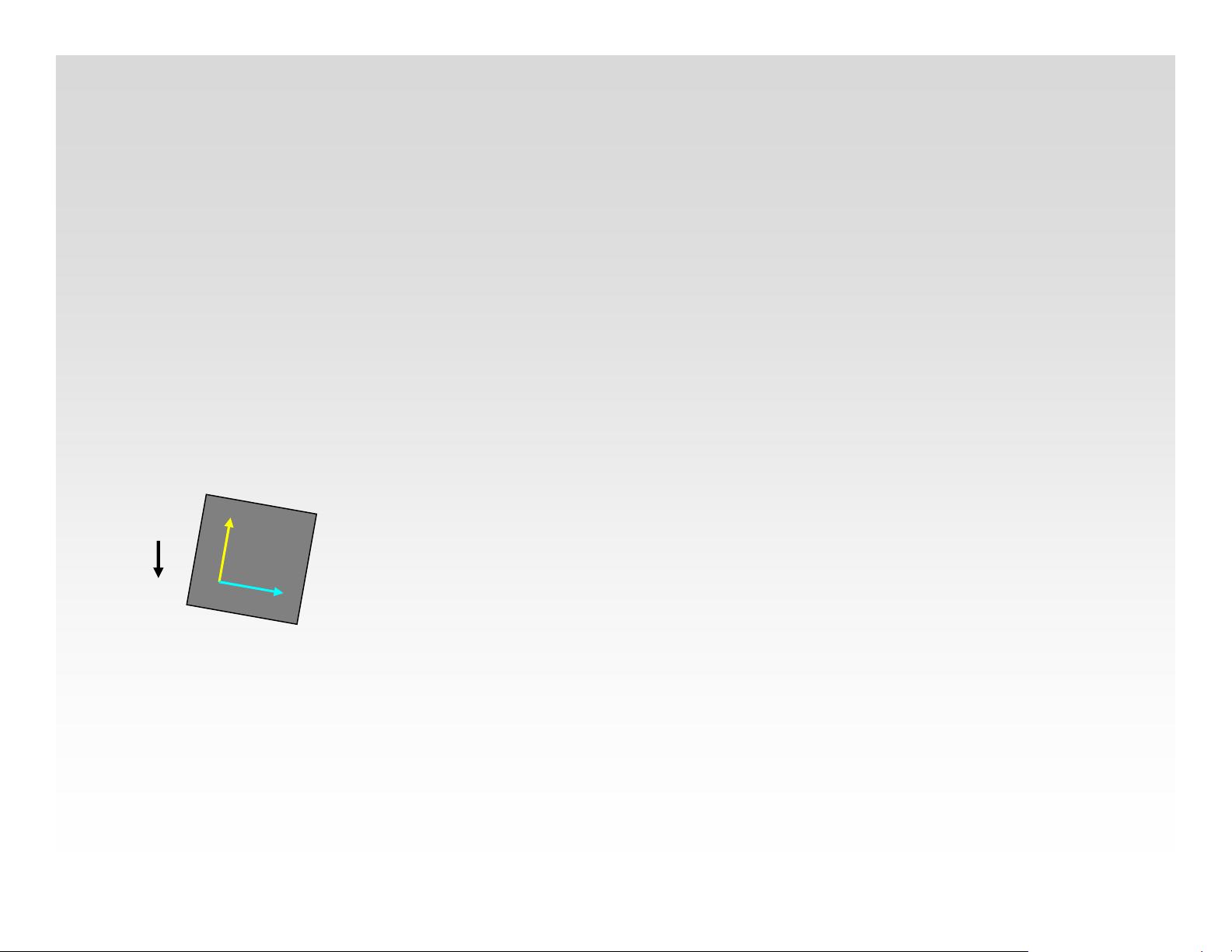
Y
X
g
Platform is tilted forward by and angle θ, but stationary (not accelerating
horizontally).
X-axis reads: (1g) × sin(
θ)
small angle approximation: sin(θ) ≈ θ, in radians
This works well (within 5%) up to θ = ±π/6 = ±30º.
So in the following bit of code,
x_acc = (float)(x_acc_ADC – x_acc_offset) * x_acc_scale;
x_acc will be the angle in radians if x_acc_scale is set to scale the output
to 1[g] when the X-axis is pointed straight downward.
To get the angle in
degrees, x_acc_scale should be multiplied by 180/π.
剩余19页未读,继续阅读
1175 浏览量
4545 浏览量
283 浏览量
185 浏览量
2582 浏览量
986 浏览量
168 浏览量
2022-04-08 上传

shiliang啤酒
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
