高鲁棒性车道线检测算法:基于多尺度重采样与实时跟踪
167 浏览量
更新于2024-09-01
收藏 871KB PDF 举报
"基于多尺度重采样的车道线检测算法,用于辅助驾驶,通过影像金字塔提高检测效率和准确率,实现在Android平台的实时检测。该算法利用水平方向的暗-亮-暗特征,结合二次曲线车道模型和卡尔曼滤波进行车道线跟踪,能够快速标定相机俯仰角,并在行车记录仪上稳定进行车道跟踪。"
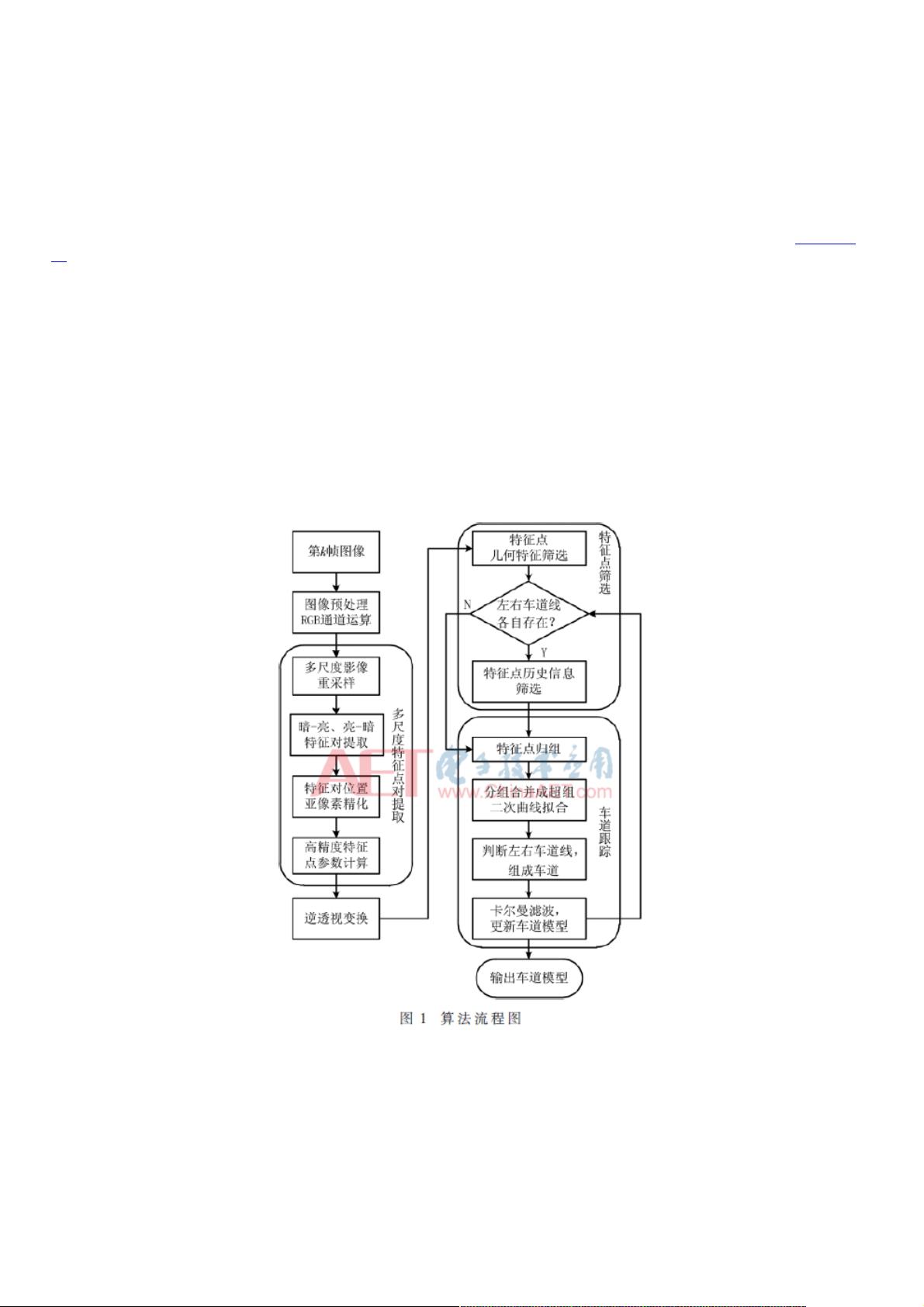
在高级驾驶辅助系统(ADAS)中,车道线检测是一个关键环节,主要依赖于低成本的单目相机。本文介绍的车道线检测算法采用了多尺度影像重采样技术,旨在解决传统方法在不同距离处可能存在的计算量大或特征点丢失的问题。首先,通过RGB三通道的通道运算生成灰度图像,再根据路面与相机的距离对图像进行分区重采样,形成影像金字塔,这样可以在多个尺度上有效地查找车道线特征点。
接着,算法利用水平方向上的暗-亮-暗特征,这些特征对应于车道线在图像中的表现,特别是在光照变化下的稳定性。同时,算法引入了二次曲线车道模型,更符合实际道路的几何形状。通过逆透视变换,将特征点转换到世界坐标系,便于后续的几何分析。如果上一帧已有检测结果,可以利用卡尔曼滤波进行跟踪,进一步提升车道线检测的连续性和准确性。
在特征点筛选和归组后,算法会进行超组的合并和模型拟合,以生成候选车道线。经过几何判断,筛选出对应的左右车道线。最后,应用卡尔曼滤波对左右车道线进行平滑处理,得到稳定的车道模型。整个流程通过精心设计,确保了在Android系统上实时运行的能力,尤其适用于行车记录仪等设备。
1.1部分详细介绍了透视变换和逆透视变换的原理,假设地面为平面,相机参数已知。相机坐标系与世界坐标系的关系被建立,以便进行坐标转换。通过这种方式,算法能够将图像中的车道线转换到与实际道路对应的位置,从而实现精确的车道线检测和车辆位置判断。
该算法结合了多尺度处理、特征检测、几何模型和滤波技术,为车道线检测提供了一个高效且鲁棒的解决方案,特别适合在移动设备上实现ADAS功能。
基于多尺度重采样的车道线检测基于多尺度重采样的车道线检测
提出了一种适用于辅助驾驶的高鲁棒性车道线检测算法。算法采用了根据距离的影像金字塔,有效提高了检测
效率和准确率,实现了Android平台的实时检测,使用水平方向暗-亮-暗特征、二次曲线车道模型和基于卡尔曼
滤波的跟踪实时提取跟踪路面车道线,实现相机俯仰角的快速标定。实验证明,基于简单特征和车道线模型算
法在Android系统的行车记录仪上可稳定地进行车道跟踪。
0 引言引言
高级驾驶辅助系统(Advanced Driver Assistance System,ADAS)快速发展,作为其中重要模块的基于视觉的车道线检
测也得到了大量研究。车道线本身设计是适合人类视觉系统处理的,单目相机成本低廉,因此目前车道线检测主流传感器是单
目相机
[1]
,本文提出的车道线检测方法也基于单目相机。
根据最终输出数据所在坐标,车道线检测方法可分为两类:一类直接在预处理后图像上使用直线或直线段检测方法
[2-3]
,无
需相机参数和路面几何参数的假设,输出参数为车道参数在图像坐标内,无法定量表达自车在车道内位置;另一类使用逆透视
变换(Inverse Perspective Mapping,IPM)将图像或特征转换到世界坐标系,生成鸟瞰图,优势在于输出坐标为可以直接判
断自车相对车道位置的世界坐标
[4-5]
。为满车道偏离检测对车道内位置的定量需求,本文算法采用基于IPM的方法。
算法采用简单亮-暗-亮特征,首先对图像RGB三通道进行通道运算生成灰度影像,根据路面据相机距离,对图像分区重采
样,在多尺度上查找特征点对,以克服同一尺度重采样造成的计算量大或远处特征点丢失问题。特征点逆透视变换到世界坐标
系后,根据几何特征初步筛选,若上一帧存在检测结果,根据上一帧结果进一步筛选特征点。特征点经筛选后首先在局部查找
相邻特征点归组并初步计算参数,然后根据组间空间位置进行合并得到超组(super group)并对超组进行模型拟合,得到候
选车道线,候选车道线经几何判断后查找出本车道左右车道线,最后对左右车道线使用卡尔曼滤波,得到最终车道模型。流程
图如图1。
1 多尺度影像重采样多尺度影像重采样
1.1 透视变换和逆透视变换透视变换和逆透视变换
采用和文献[4]中相同方法,假设地面为平面,相机内参数、外参数已知,如图 2,以相机光学中心为原点,定义世界坐标
系{F
w
}={X
w
,Y
w
,Z
w
},仅考虑相机俯仰角?琢和偏航角α,相机高度为h。
下载后可阅读完整内容,剩余8页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-11-22 上传
2020-10-16 上传
2021-05-22 上传
2021-02-04 上传
2021-05-18 上传

weixin_38736652
- 粉丝: 1
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- HybridCLR(华佗)+Addressable实现资源脚本全热更,实现逻辑看https://czhenya.blog.csd
- three+vite开发demo
- 用于注视估计和跟踪的L2CS-Net的官方PyTorch实现
- L2CS-Net视线估计MPLLGaze-0-model.zip
- JDBC数据库相关资料包
- LNTON羚通烟火识别算法、烟雾检测工具,支持图片、RTSP实时流、mp4文件中的烟火检测和烟雾识别,输出告警图片叠框,实用工具
- VB6.0与台达PLC通讯源码 包含X点Y点和DB的读写
- 勾月软件-管道计算(VB6.0源代码版).rar
- 魔改的家电销售订单管理系统python
- 数据库课设天天生鲜系统python+django+mysql
- CVE-2023-6548 和 CVE-2023-65的Citrix Netscaler/ADC-13.0-92.21 最新补丁
- pytorch练手数据集
- c++火车票管理以及购票策略
- springcloud资源
- springboot材料
- 数值分析实验报告,基于python语言实现
