手绘路线图驱动的动态环境交互视觉导航策略
99 浏览量
更新于2024-08-26
收藏 401KB PDF 举报
本文主要探讨了一种在未知动态环境中利用手绘路线图进行交互式视觉导航的方法。研究者针对移动机器人设计了一种创新的导航策略,结合高级手绘路线图和高效的图像匹配技术,以提高导航的精度和鲁棒性。
首先,关键步骤是根据较小偏差的原则从手绘路线中选择关键引导点。这些引导点将原始路线划分为多个可管理的片段,便于机器人在复杂环境中逐段执行任务。这种方法的优势在于能够适应手绘路线的不精确性,同时通过减少误差范围提高了导航的可行性。
在实际操作中,当机器人沿着每个路段行驶时,它会实时采集来自摄像头的图像数据。为了提升图像匹配的效率,研究者提出了一种预测估计方法,通过此方法可以快速识别出最具匹配可能性的图像。这里采用SURF(Speeded Up Robust Features)算法,这是一种广泛用于计算机视觉的高效特征检测器,能够提取稳定的局部特征点,并利用KD-Tree数据结构加速匹配过程。
接着,利用RANSAC(Random Sample Consensus)算法,研究者确定了参考图像与实时图像之间的投影变换矩阵。这个矩阵有助于理解参考图片在实时环境中的位置关系,从而准确定位机器人的位置,为路径规划提供依据。
整个导航流程是迭代的,机器人会持续地通过比较参考里程表与实时图像信息,不断调整其行动路径,避开动态障碍物。通过这种方式,即使在动态环境中,新提出的导航方法也能展现出显著的优势,包括更高的导航准确性和避开动态障碍的能力。
实验结果验证了这种方法的有效性,尤其是在面对不精确的手绘路线图时,新方法展现出在复杂动态环境中的导航效率和稳定性。这项研究成果对于那些依赖视觉信息进行自主导航的移动机器人系统具有重要的理论和实践价值,可能对未来的机器人导航技术发展产生积极影响。
X. Li et al.: An Interactive Visual Navigation Method Using a Hand-drawn-Route-Map in an Unknown Dynamic Environment
313
that is, there is a mapping relation
3
between L
and
Landmarks(.).
P
includes the jumping-off point S of
route, the terminal D and the route, along which mobile
robot doesn't really and entirely run. This path is sto-
chastic, flexible, and imprecise, which only guides mo-
bile robot to run according to its approximate tendency,
this is because there is no precise size and scale about
the real environment.
R
represents the initial approxi-
mate pose of mobile robot. There is a relaxing mapping
relation between it and the real one. In this paper, we set
out from the tendency of sketched route. The original
route is divided into several segments. every segment is
composed of two key boot points and curve. In order to
control mobile robot well and avoid accumulative errors
for frequent turns, we adopt the way of linear motion
between two key boot points. How to pick up key boot
points relies on the principle of lesser deviation. That is,
it not only reflects the original tendency of robot motion,
but only reduce the turn frequency of robot, so that we
can try to reduce the number of the key boot points. How
to pick up key boot points is shown in Figure 1, where
curve represents the original route sketched, the mini-
mum circle represents the process of discretization, the
bigger circle represents the candidate of key boot points,
and the biggest circle represents the key boot points
picked up. The key steps are listed as follows:
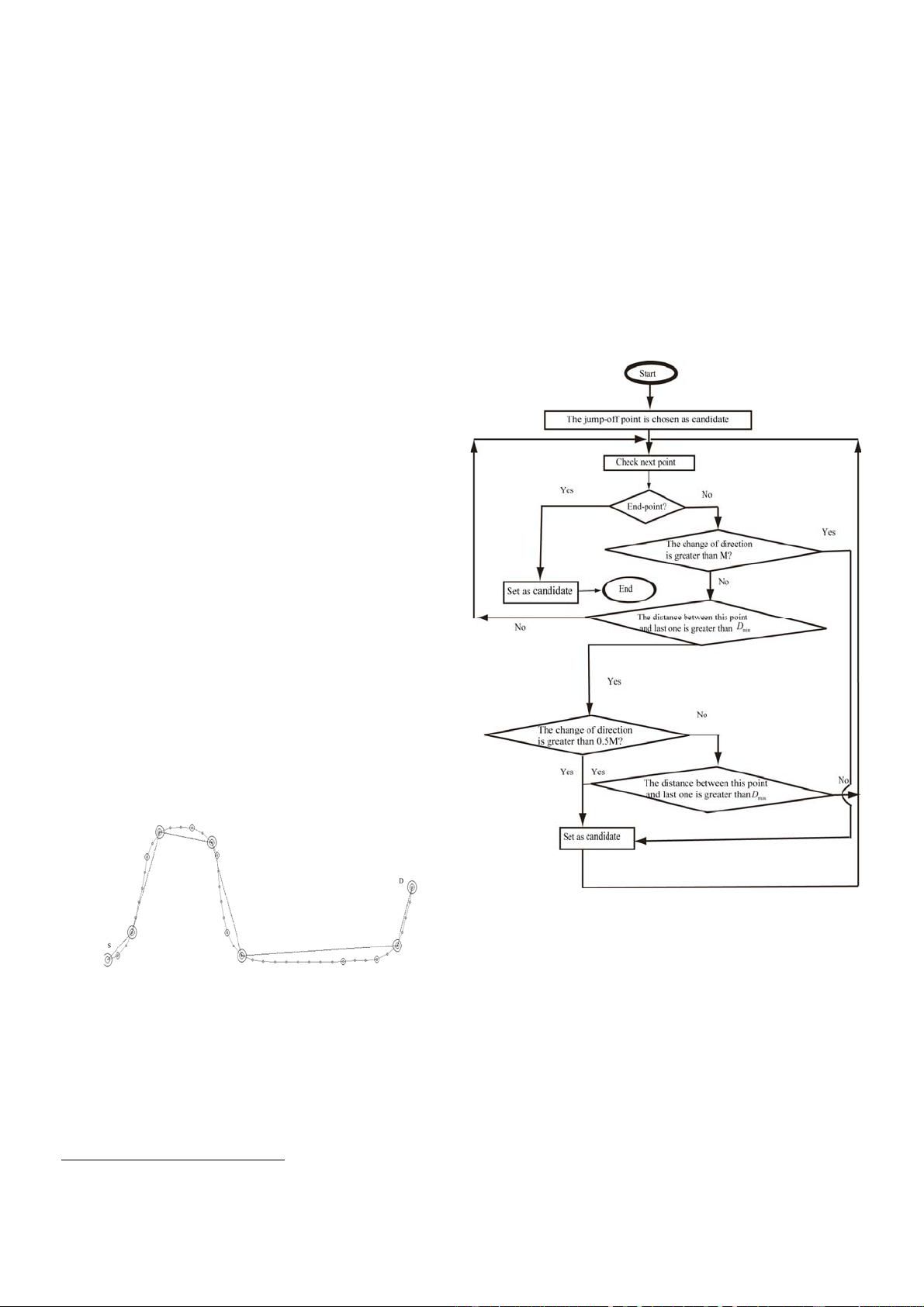
1) Pick up the candidate of key boot points. Start from
the jumping-off point, detect in turn every discrete point,
and set the threshold M of angle change, and set the
minimum and maximum distance threshold
min
D
and
max
D
. The particular flowchart is shown in Figure 2.
According to experience, we set M
20
o
=
,
min
1Dcm
=
,
and
max
8Dcm=
.
Figure 1. Draw a path and pick up its key boot points.
2) Pick up the key boot points. The key flowchart of
picking up the key boot points is shown in Figure 3.
i
T
represents the
i key boot point. T is the number of the
candidates of key boot points.
b
i and
e
i represent re-
spectively the beginning and ending detection points. H
3
The relative position relation among every landmarks in sketched
map is consistent to that in real environment.
represents the maximum number of candidates between
two key boot points.
be
ii
L represents the line segment
between the
b
i candidate and the
e
i one.
Max(Dist(p,
be
ii
L )) represents the maximum distance
among all discrete points p on original curve between
b
i and
e
i to the line
be
ii
L . D is the pixel distance be-
tween any two neighboring discrete points.
α
repre-
sents the threshold to decide whether to be a key boot
point. Here H=4 and
1.0
α
=
.
Figure 2. The flowchart of selecting some candidate points.
3. Rough localization of robot based on vision
In order to roughly localize robot by applying the vis-
ual information in the process of navigation, here two
necessary hypothesises are proposed as follows: 1) the
initial approximate distance of shooting picture is known
and there are abundant of environmental features. 2) The
angles between these landmarks and floor are kept no
greater change when mobile robot is running in the en-
vironment.
A. Acquisition of approximate distance
According to the model of pinhole, any one point in
space is transformed from camera coordinates to image
2
2
剩余11页未读,继续阅读
337 浏览量
2008-11-10 上传
2021-06-01 上传
2012-12-03 上传
2023-08-23 上传
2024-01-05 上传
2021-05-20 上传

weixin_38679233
- 粉丝: 2
- 资源: 872
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
