基于Kinect的机器人带噪语音识别:关键技术与优势
版权申诉
PDF格式 | 10.45MB |
更新于2024-07-01
| 40 浏览量 | 举报
本文主要探讨了人工智能领域中一项前沿技术——基于Kinect深度数据辅助的机器人带噪语音识别。Kinect是一款多传感器设备,以其独特的3D数据捕捉能力,在语音识别系统中发挥了重要作用。该研究旨在解决机器人在嘈杂环境下的语音感知问题,通过融合不同模态信息,提升语音识别的准确性和鲁棒性。
章节一,绪论部分,首先阐述了研究的背景和意义。随着人工智能的发展,尤其是机器人技术的进步,对机器人在复杂环境中的语音识别能力提出了更高要求。带噪语音识别是这一领域的关键挑战,因为实际环境中,机器人往往面临各种噪声干扰。作者提到,研究的目标是利用Kinect的深度数据来增强语音信号,并将其与音频和视觉信息结合起来,从而构建一个新型的多模态语音识别系统,以超越传统自动语音识别系统的性能。
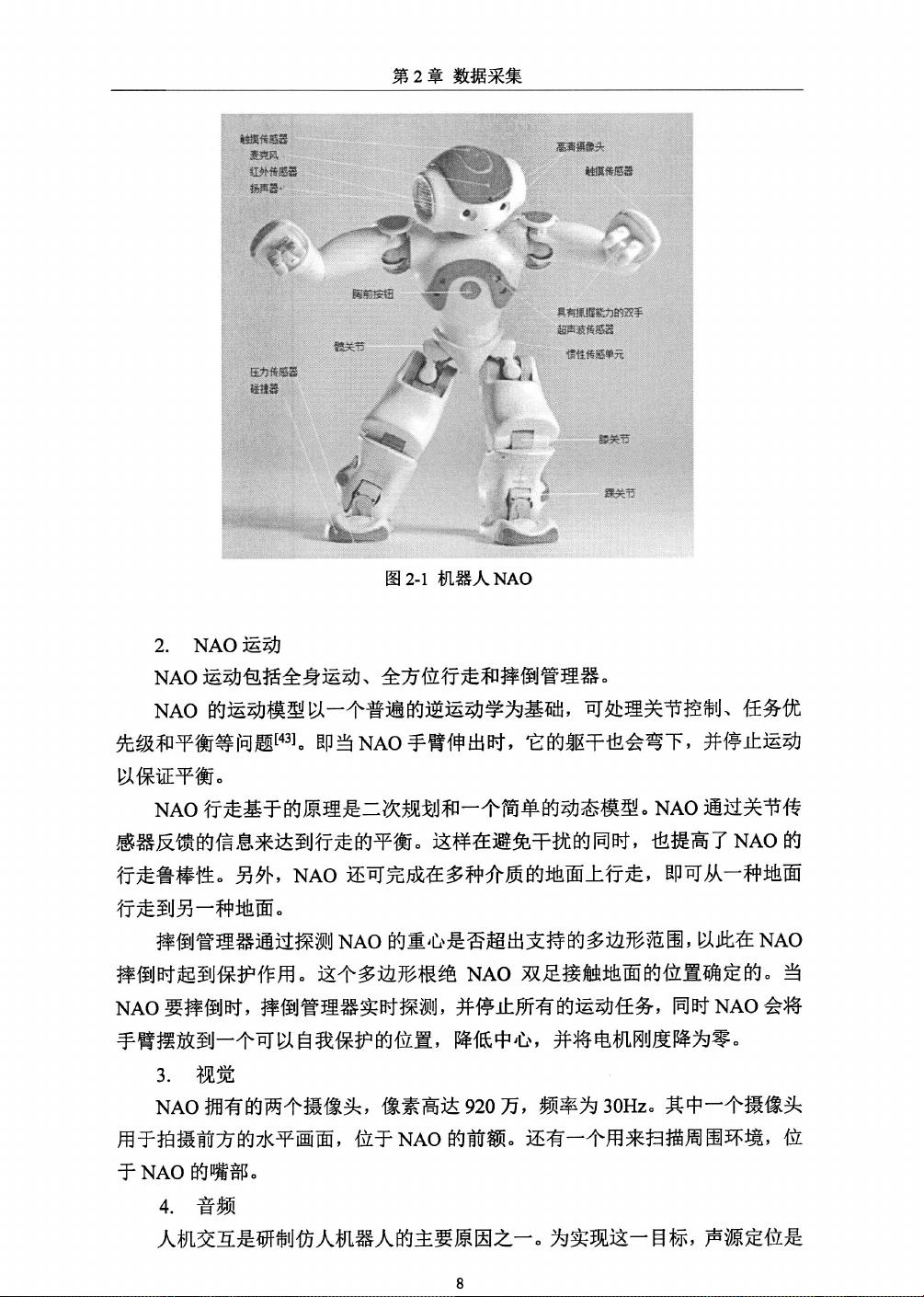
接下来,章节二介绍了数据采集的过程。研究者选择了机器人NAO作为实验平台,NAO因其灵活性和可编程性在人机交互中广泛应用。Kinect被选为数据采集工具,其硬件组成包括摄像头、深度传感器和红外传感器,这些组件共同提供丰富的3D空间信息。工作原理部分详细描述了如何利用Kinect获取实时的面部和环境数据,这些数据对于后续的语音识别至关重要。
章节三可能详细讨论了语音增强技术和音视频融合技术在本文中的应用。研究者可能针对如何处理机器人环境中的噪声,如背景噪音、机械噪声等,采用了先进的信号处理算法和技术。同时,将Kinect的深度信息与音频和视频信号融合,可能是通过特征级融合或者决策级融合,以提高识别的准确性和稳定性。
最后,实验结果和分析部分展示了在不同噪声条件下,基于Kinect的多模态系统相较于传统方法的优势。这些实验验证了所提方法的有效性,并可能对比了与其他同类研究的性能,以证明创新之处。
这篇论文的核心内容围绕着如何利用Kinect的深度数据改进机器人的语音识别能力,特别是在噪声环境下,通过多模态信息融合,提升识别性能,为未来人机交互和智能机器人在实际应用中的语音交互提供了新的解决方案。
万方数据
剩余53页未读,继续阅读
相关推荐



programhh
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解读SAP R/3主要模块及行业应用经典教材
- 野猪Dbg:强化调试工具,轻松破解强壳保护
- ThreeJs实现基础3D太阳系模型及其开发进展
- Python网络编程实战全解:Web框架至服务化完整流程
- MATLAB实现BCH编码与译码教程及结果分析
- 高效学习IBM-PC汇编语言程序设计要点
- 安卓基础教程与源码解析系列
- Struts2开发:成功配置完整jar包指南
- GMail标签窗格扩展神器:LabelPane Expander
- 掌握Markdown:程序员的轻量级文本标记语言
- STC15F408AS单片机核心板开发资料下载
- 云南大学软件工程实验报告:六大核心实验流程解析
- ASP技术实现BBS论坛源码分析与应用
- Arduino SR04超声波传感器库文件介绍
- 图像变形及插值功能实现与源码解析
- VC++多曲线控件集合:高效图表绘制解决方案
