融合概率下界估计:二维激光雷达与摄像机标定新法
版权申诉
87 浏览量
更新于2024-06-27
收藏 954KB DOCX 举报
本文档探讨了一种新颖的二维激光雷达(2D LiDAR)与摄像机标定方法,该方法主要关注在基于观测概率有效下界的估计过程中,提高两种传感器间的相对姿态和位置估计精度。在现代无人车辆和机器人系统中,融合摄像机的高分辨率视觉信息与2D LiDAR的高精度距离信息至关重要。然而,2D LiDAR相较于3D版本,缺乏直接的点云与像素对应,使得外参数标定更具挑战性。
传统上,2D LiDAR与摄像机的标定方法主要分为两类:基于标定物的和自标定方法。基于标定物的方法,如Zhang等人的工作[4],利用棋盘格作为标定对象,通过估计两者间的相对运动并结合空间约束来找到初始参数。然而,这种方法存在旋转矩阵正交性问题,导致初始解的有效性不稳定性。文献[5]改进了这一方法,通过P3P问题处理“线-面”关系,但P3P问题本身存在多解和退化问题。
文献[6]和[7]分别通过虚拟三面体和多约束误差函数模型进一步提升精度,减少了这些问题。其他研究者也尝试了不同类型的标定物,如三角形模板[8]、V形板[9]、对折三角形带有棋盘格[10],甚至球体[11]和三维空间中的控制点[12],通过特定几何约束来增强标定的稳定性和准确性。
本文着重于提出一种基于观测概率有效下界的估计方法,这可能涉及统计建模,通过考虑实际观测数据的概率分布来优化标定过程,从而更准确地估计激光雷达和摄像机之间的相对关系。这种方法可能会减少标定过程中的一些不确定性,提高标定的鲁棒性和实用性,特别适用于复杂的环境和动态场景。通过这种方式,论文不仅解决了标定难题,还可能为融合系统提供更为可靠的基础,从而增强整个系统的性能和可靠性。
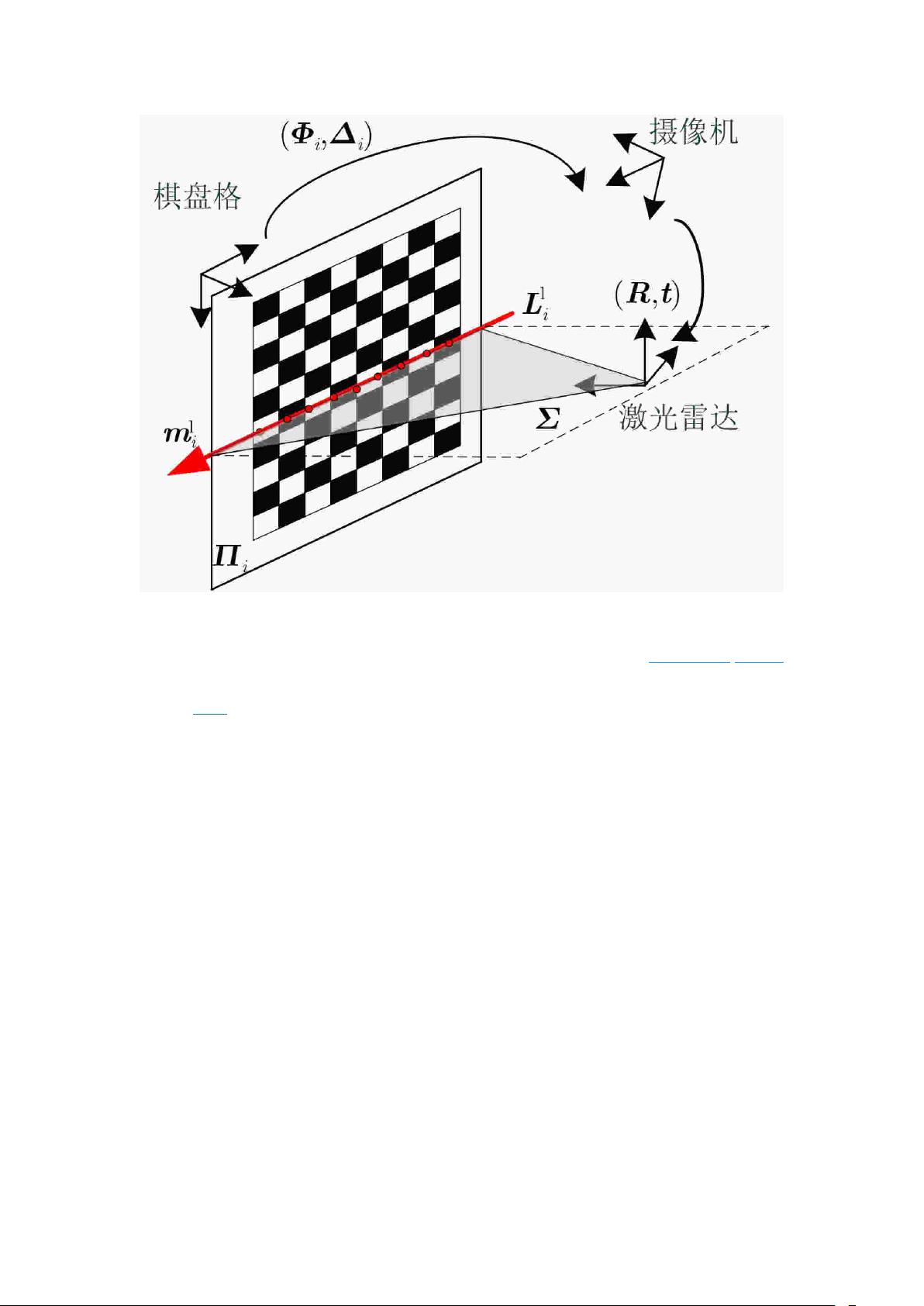
图 1 2 维激光雷达坐标系和摄像机坐标系转换关系
下载: 全尺寸图片 幻灯片
如图 1 所示,基于棋盘格的标定方法将棋盘格摆放在激光雷达和摄像机能观测到的不
同位置,利用激光雷达和摄像机同时获取多组“距离-图像”观测值。我们假定在摄像机坐标
系中第$ i $个棋盘格所在平面表示为${{\boldsymbol{\varPi}} _i}$,激光雷达扫描面
${\boldsymbol{\varSigma}}$和棋盘格平面${{\boldsymbol{\varPi}} _i}$在激光雷达坐标系中
相交于一条共面直线${\boldsymbol{L}}_i^{\rm{l}}$。最小解外参数标定方法思路是通过棋
盘格平面${{\boldsymbol{\varPi}} _i}$和共面直线${\boldsymbol{L}}_i^l$对应的 3 组 “线-
面”空间约束,建立关于标定参数${\boldsymbol{R}}$和${\boldsymbol{t}}$的约束方程,实
现激光雷达和摄像机之间的参数标定。
3. 最小解集合的分级聚类
传统最小解标定方法利用距离误差函数从解集合选择一个最小误差解。通过分析多解
的分布特点,本文发现距离误差函数存在多个局部最优值,由于噪声干扰,最小误差解可
能是某个局部最优值邻域的假解而丢失真解。因此,首先本文提出一种最小解集合的分级
聚类方法,通过对解集合进行聚类,将属于同一局部最优值邻域内的解划归为一类。目的
剩余14页未读,继续阅读
2023-02-23 上传
2021-11-18 上传
2023-02-23 上传
2022-12-15 上传
2023-02-23 上传
2023-03-06 上传

罗伯特之技术屋
- 粉丝: 4494
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







