探索SerDes:从用户视角解析复杂数模混合设计
需积分: 41 181 浏览量
更新于2024-07-18
12
收藏 1.22MB DOCX 举报
SerDes,即Serializer-Deserializer(序列/解序列器),是现代集成电路特别是FPGA设计中不可或缺的一部分,主要用于在高速串行接口中实现并行数据的转换和通信。随着技术的发展,从PCI到PCIe、ATA到SATA、并行ADC接口到JESD204以及Serial RIO等各种高速接口,都广泛采用SerDes来提升数据传输速率和带宽效率。
1. SerDes的重要性在于解决并行接口的局限性。在传统并行总线接口中,如系统同步和源同步,随着接口频率的提高,时钟skew(时钟传播延时差异)、dataskew(数据位间延时差异)以及数据和时钟之间的不一致性等问题会限制数据的有效传输窗口。系统同步接口需要在接收端进行补偿,但PVT(过程、电压、温度)变化会导致补偿困难;而源同步接口虽然能减轻clockskew的影响,但仍然受限于设备性能和环境条件。
2. SerDes的核心功能包括数据序列化(将并行数据转换为串行)、同步(提供稳定的时钟信号)和解序列化(在接收端恢复原始并行数据)。在SerDes设计中,关键的组成部分包括:
- 无时钟信号:虽然通常我们会提到SerDes工作需要时钟,但在实际中,SerDes内部会通过锁相环(PLL)或其它同步技术来生成所需的时钟,确保数据的正确传输。
- 加重和均衡:为了补偿信号在传输过程中可能遇到的失真,SerDes通常会采用加重技术,即在信号中添加额外的幅度或能量,以提高接收端的信噪比。均衡则是通过调整信号的幅度和相位来抵消信号衰减和噪声的影响。
- 抖动与误码:抖动指的是信号周期的随机变化,它可能导致数据包中的比特错误。误码则是指数据传输过程中实际接收比特与理想比特的不符。SerDes设计需考虑如何最小化抖动,同时通过错误检测和纠正机制来处理误码。
- 抖动类型:常见的抖动类型包括时钟抖动(clk jitter)、数据抖动(data jitter)以及相位抖动(phase jitter)。它们之间相互关联,需要通过精心的设计和控制来确保系统的稳定性和可靠性。
3. 在一个32位数据并行总线的示例中,对于发送端的skew、走线引入的延时、时钟抖动以及接收端触发器采样窗口的要求都非常高。这意味着SerDes设计不仅要考虑硬件实现的挑战,还要充分考虑信号完整性(Signal Integrity)问题,以保证数据在长距离传输后的正确性和可靠性。
SerDes作为现代FPGA设计中的关键技术,其工作原理涉及复杂的数模混合电路设计,需要对时钟同步、信号质量控制和抖动管理有深入理解。对于初次接触SerDes的工程师来说,深入学习和实践这些概念至关重要。尽管SerDes设计具有挑战性,但它对于提高系统性能和适应高速接口标准至关重要。
便维护和测试,还会包括控制和状态寄存器,环回测试,)D 测试等功能。见图 &,。
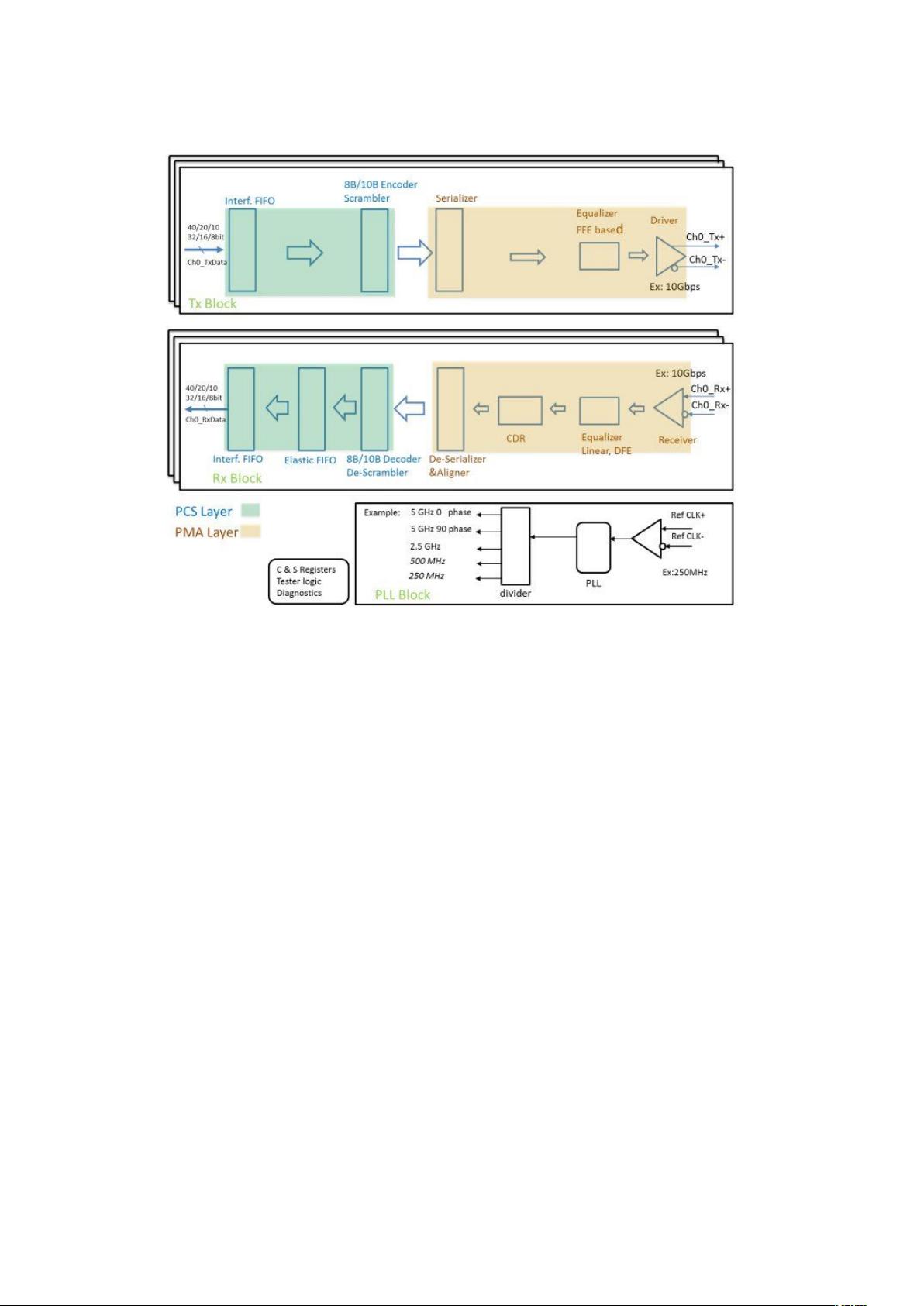
Figure 2.1 Basic Blocks of a typical SerDes
图中蓝色背景子模块为 层,是标准的可综合 ;* 数字逻辑,可以硬逻辑实现,
也可以使用 软逻辑实现,相对比较容易被理解。褐色背景的子模块是 ; 层,是数
模混合 ;0;* 电路,是理解 区别于并行接口的关键,也是本文要讨论的内容。
发 送 方 向 $! 信 号 的 流 向 C# 软 逻 辑 送 过 来 的 并 行 信 号 , 通 过 接 口
*#*"#送给 >D,'D 编码器>D,'D#-或扰码器,以
避免数据含有过长连零或者连 ,。之后送给串行器进行 并E串 转换。串行数据
经过均衡器FA调理,由驱动器-B发送出去。
接收方向)!信号的流向"#外部串行信号由线性均衡器 0# FA或

剩余36页未读,继续阅读
2020-07-13 上传
2023-10-14 上传
点击了解资源详情
2018-10-28 上传
2016-07-18 上传
2022-04-07 上传
2024-01-16 上传

shaoqifeng
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
