图神经网络的全面调查
下载需积分: 50 | PDF格式 | 1.6MB |
更新于2024-07-16
| 80 浏览量 | 举报
"这篇文章是关于图神经网络的全面调查,主要探讨了深度学习在处理非欧几里得数据,如复杂关系和对象间相互依赖的图数据时所面临的挑战,以及近年来图神经网络(GNN)的发展。文章提出了一个新的分类体系,将当前的GNN技术分为四大类:循环图神经网络、卷积图神经网络、图自编码器和时空图神经网络,并讨论了它们在不同领域的应用,同时总结了相关的开源代码、基准数据集和模型评估。此外,还指出了这个快速发展领域的未来研究方向。"
本文深入探讨了图神经网络,一种旨在处理非结构化数据,如图数据的深度学习方法。传统的深度学习技术在处理图像、视频、语音识别和自然语言理解等欧几里得空间数据上取得了显著成就,但面对复杂网络结构的数据时,其性能受限。图数据的复杂性在于它们包含的对象间的关系和相互依赖,这对现有机器学习算法提出了挑战。
作者提出了一种新的GNN分类框架,将其分为四类:
1. **循环图神经网络(Recurrent Graph Neural Networks)**:这类网络借鉴了循环神经网络(RNN)的概念,通过信息的序列传递来处理图的时间动态变化。
2. **卷积图神经网络(Convolutional Graph Neural Networks)**:受卷积神经网络(CNN)的启发,这些网络允许在图结构上进行类似卷积的操作,提取节点和边的局部特征。
3. **图自编码器(Graph Autoencoders)**:结合自编码器的思想,图自编码器试图学习图数据的低维表示,用于降维、去噪或生成新的图实例。
4. **时空图神经网络(Spatial-Temporal Graph Neural Networks)**:这类网络专门设计用于处理具有时间和空间维度的图数据,例如交通网络或传感器网络。
文章不仅概述了这些技术的基本原理,还详细介绍了它们在社交网络分析、推荐系统、生物信息学、化学分子结构分析和物理系统建模等多个领域的应用实例。此外,作者提供了重要的资源,包括开放源代码库、标准数据集和GNN模型的性能评估指标,这有助于研究人员和开发者进一步探索和实践图神经网络。
最后,作者展望了该领域的未来研究方向,可能包括更高效的模型架构、理论分析、可解释性以及对大规模图数据的处理能力提升等,以应对图神经网络在实际应用中遇到的新挑战。这篇综述为理解和研究图神经网络提供了一个全面而深入的视角。
JOURNAL OF L
A
T
E
X CLASS FILES, VOL. XX, NO. XX, AUGUST 2019 5
𝐆𝐫𝐚𝐩𝐡
𝑿
𝑹𝒆𝑳𝒖 𝑹𝒆𝑳𝒖
𝐎𝐮𝐭𝐩𝐮𝐭𝐬
𝐆𝐜𝐨𝐧𝐯
…
𝐆𝐜𝐨𝐧𝐯
…
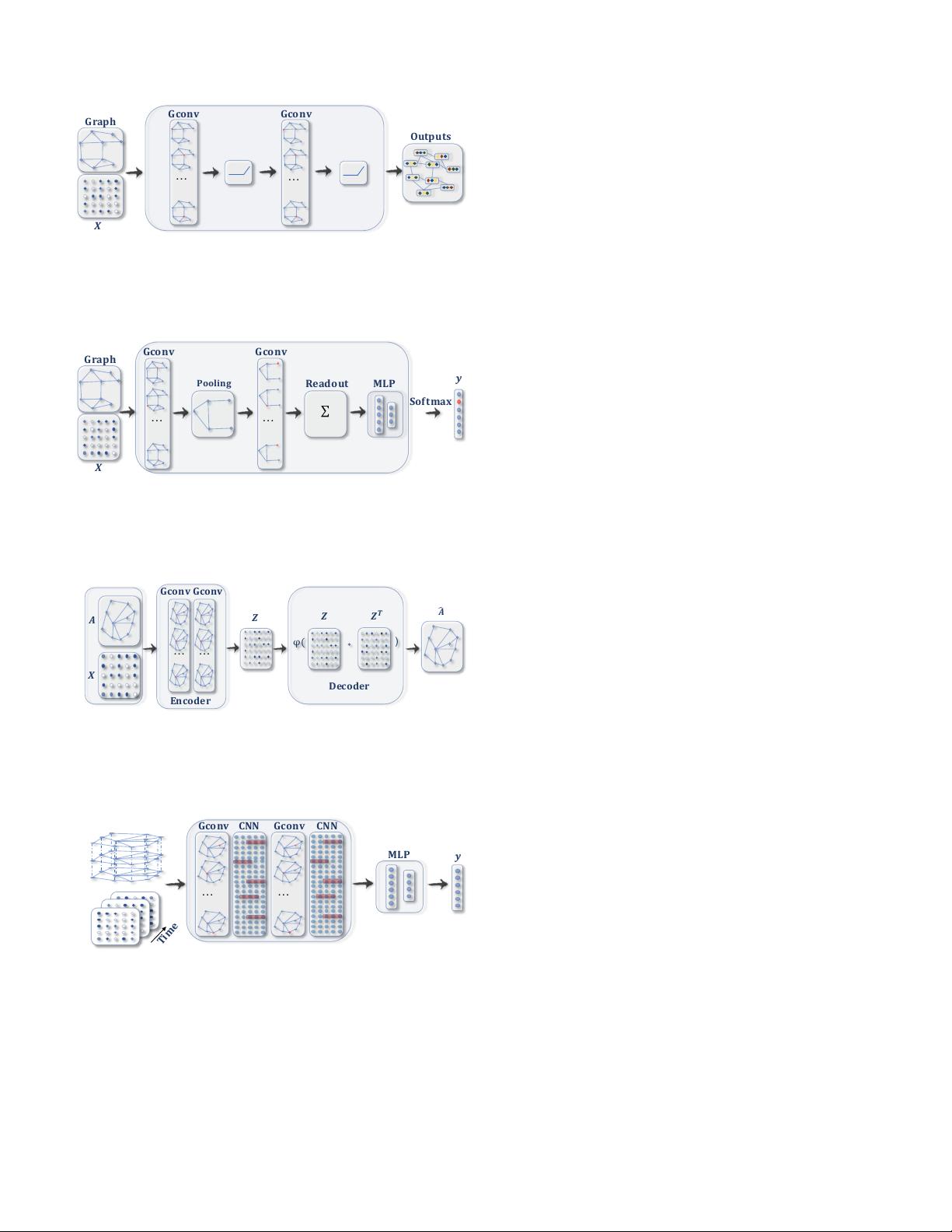
(a) A ConvGNN with multiple graph convolutional layers. A graph convo-
lutional layer encapsulates each node’s hidden representation by aggregating
feature information from its neighbors. After feature aggregation, a non-linear
transformation is applied to the resulted outputs. By stacking multiple layers,
the final hidden representation of each node receives messages from a further
neighborhood.
𝐆𝐜𝐨𝐧𝐯
𝐆𝐫𝐚𝐩𝐡
𝐑𝐞𝐚𝐝𝐨𝐮𝐭
𝐆𝐜𝐨𝐧𝐯
𝐏𝐨𝐨𝐥𝐢𝐧𝐠
𝐒𝐨𝐟𝐭𝐦𝐚𝐱
𝑿
… …
𝐌𝐋𝐏
𝒚
∑
(b) A ConvGNN with pooling and readout layers for graph classification
[21]. A graph convolutional layer is followed by a pooling layer to coarsen
a graph into sub-graphs so that node representations on coarsened graphs
represent higher graph-level representations. A readout layer summarizes the
final graph representation by taking the sum/mean of hidden representations
of sub-graphs.
𝒁"
φ (
𝒁
𝑻
𝒁
∗
)
𝑨
𝑿
𝑨
)
𝐃𝐞𝐜𝐨𝐝𝐞𝐫
𝐄𝐧𝐜𝐨𝐝𝐞𝐫
…
𝐆𝐜𝐨𝐧𝐯"𝐆𝐜𝐨𝐧𝐯
…
(c) A GAE for network embedding [61]. The encoder uses graph convolutional
layers to get a network embedding for each node. The decoder computes the
pair-wise distance given network embeddings. After applying a non-linear
activation function, the decoder reconstructs the graph adjacency matrix. The
network is trained by minimizing the discrepancy between the real adjacency
matrix and the reconstructed adjacency matrix.
𝑨
𝑿
𝐓𝐢𝐦𝐞
'''''𝐆𝐜𝐨𝐧𝐯''''𝐂𝐍𝐍''''''𝐆𝐜𝐨𝐧𝐯'''''𝐂𝐍𝐍
…
…
𝐌𝐋𝐏
𝒚
𝐓𝐢𝐦𝐞
(d) A STGNN for spatial-temporal graph forecasting [74]. A graph convolu-
tional layer is followed by a 1D-CNN layer. The graph convolutional layer
operates on A and X
(t)
to capture the spatial dependency, while the 1D-CNN
layer slides over X along the time axis to capture the temporal dependency.
The output layer is a linear transformation, generating a prediction for each
node, such as its future value at the next time step.
Fig. 2: Different graph neural network models built with
graph convolutional layers. The term Gconv denotes a graph
convolutional layer. The term MLP denotes a multi-layer
perceptron. The term CNN denotes a standard convolutional
layer.
ular way is to utilize the negative sampling approach
which samples a portion of node pairs as negative pairs
while existing node pairs with links in the graphs are
positive pairs. Then a logistic regression layer is applied
to distinguish between positive and negative pairs [42].
In Table III, we summarize the main characteristics of
representative RecGNNs and ConvGNNs. Input sources, pool-
ing layers, readout layers, and time complexity are compared
among various models. In more detail, we only compare the
time complexity of the message passing/graph convolution
operation in each model. As methods in [19] and [20] require
eigenvalue decomposition, the time complexity is O(n
3
). The
time complexity of [46] is also O(n
3
) due to the node pair-
wise shortest path computation. Other methods incur equiva-
lent time complexity, which is O(m) if the graph adjacency
matrix is sparse and is O(n
2
) otherwise. This is because in
these methods the computation of each node v
i
’s representa-
tion involves its d
i
neighbors, and the sum of d
i
over all nodes
exactly equals the number of edges. The time complexity of
several methods are missing in Table III. These methods either
lack a time complexity analysis in their papers or report the
time complexity of their overall models or algorithms.
IV. RECURRENT GRAPH NEURAL NETWORKS
Recurrent graph neural networks (RecGNNs) are mostly pi-
oneer works of GNNs. They apply the same set of parameters
recurrently over nodes in a graph to extract high-level node
representations. Constrained by computational power, earlier
research mainly focused on directed acyclic graphs [13], [80].
Graph Neural Network (GNN*
2
) proposed by Scarselli et
al. extends prior recurrent models to handle general types of
graphs, e.g., acyclic, cyclic, directed, and undirected graphs
[15]. Based on an information diffusion mechanism, GNN*
updates nodes’ states by exchanging neighborhood information
recurrently until a stable equilibrium is reached. A node’s
hidden state is recurrently updated by
h
(t)
v
=
X
u∈N(v)
f(x
v
, x
e
(v,u)
, x
u
, h
(t−1)
u
), (1)
where f(·) is a parametric function, and h
(0)
v
is initialized
randomly. The sum operation enables GNN* to be applicable
to all nodes, even if the number of neighbors differs and no
neighborhood ordering is known. To ensure convergence, the
recurrent function f(·) must be a contraction mapping, which
shrinks the distance between two points after projecting them
into a latent space. In the case of f (·) being a neural network,
a penalty term has to be imposed on the Jacobian matrix
of parameters. When a convergence criterion is satisfied,
the last step node hidden states are forwarded to a readout
layer. GNN* alternates the stage of node state propagation
and the stage of parameter gradient computation to minimize
a training objective. This strategy enables GNN* to handle
cyclic graphs. In follow-up works, Graph Echo State Network
(GraphESN) [16] extends echo state networks to improve the
2
As GNN is used to represent broad graph neural networks in the survey,
we name this particular method GNN* to avoid ambiguity.
剩余21页未读,继续阅读
相关推荐




weixin_40452238
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
