移动机器人导航:激光SLAM技术详解与路径规划策略
下载需积分: 10 | PPTX格式 | 5.4MB |
更新于2024-07-18
| 34 浏览量 | 举报
移动机器人导航是现代信息技术领域的一个重要分支,它涉及到机器人在复杂环境中的自主定位、路径规划以及避障能力。本讲义将深入探讨以下几个关键知识点:
1. **导航系统架构**:
移动机器人导航通常包括四个主要组件:地图创建、定位系统、路径规划和避障机制。导航系统的工作原理可以分为两个主要架构:基于模型的导航和基于行为的导航。前者依赖于对环境的完整建模或功能性的横向分解,而后者则是不完全建模或行为导向的纵向分解,强调环境认知和自下而上的定位。
2. **地图创建**:
地图是机器人导航的基础,它包括多种类型,如3D栅格地图、拓扑地图和几何地图。地图的创建可以通过人工测绘、卫星航图、车辆测绘SLAM(同步定位与地图构建)等技术实现。SLAM技术是一种实时构建环境地图并同时进行自主定位的方法,核心在于环境相对位置的确定,如夜间着陆灯标和走廊岔口的处理。
3. **定位系统**:
定位系统包括多种定位技术,如惯性导航(利用加速度计)、全球卫星导航系统(如GPS)、天文导航、无线电导航以及组合导航(如惯性与GPS的集成),各有优缺点。组合导航通过多传感器信息融合提高定位精度,避免单一传感器的局限。
4. **路径规划与避障**:
路径规划是根据特定性能指标寻找从起点到终点的最优或次优路径,同时避开障碍物。路径规划策略有战略和战术层面,涉及长期目标的设定和短期问题的解决。避障是规划过程中必不可少的一部分,确保机器人的安全移动。
5. **SLAM技术**:
SLAM技术的核心在于同步定位与环境建模,机器人在移动的同时更新其位置并构建环境地图。这在2D激光雷达SLAM中尤为重要,通过激光扫描数据来估计机器人位置并构建周围环境的精确地图。
6. **环境表示与建模**:
环境建模是导航的关键,通过特征提取、网格化、拓扑结构等方式,将现实世界转化为机器人可以理解的形式,便于导航决策。
7. **导航架构的结合**:
实际应用中,可能采用混合导航架构,结合基于模型和基于行为的方法,以兼顾全局和局部信息,实现更高效、精确的导航。
总结起来,移动机器人导航是一门综合性的技术,涵盖了硬件、软件和算法等多个层面,旨在让机器人在复杂环境中自主、高效地完成导航任务。随着技术的进步,未来将会有更多创新和融合,使得机器人在各种场景下的导航能力得到进一步提升。
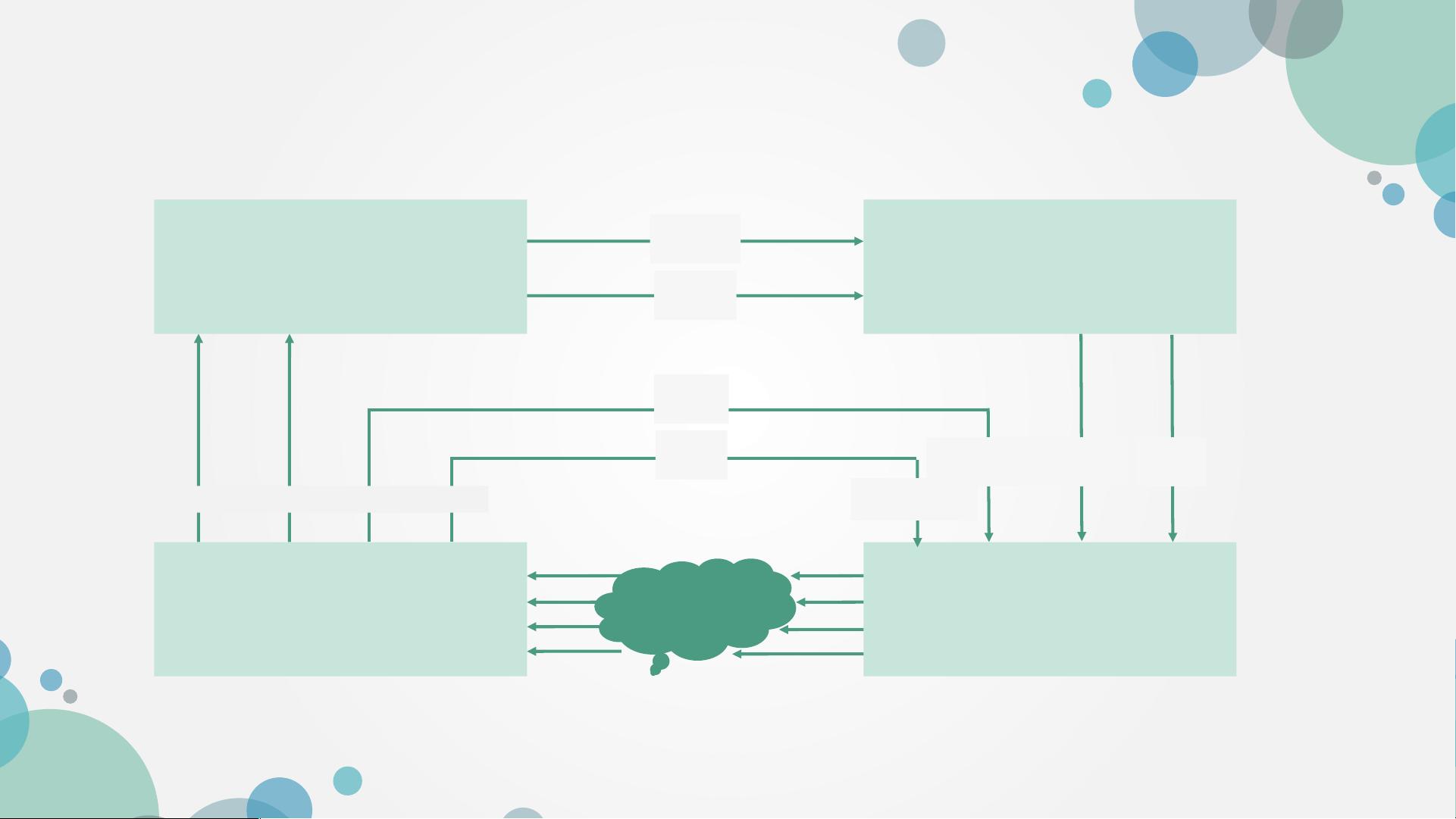
组合导航架构
定位
运动控制环境感知
环境认知
真实环境
位置
地图
构建局部地图
位置
地图
避障 路径
行为感知
位置反馈
剩余33页未读,继续阅读
相关推荐





hyakkiyak
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
