"UWBIMU融合室内定位导航技术研究及实施建议"
需积分: 0 27 浏览量
更新于2024-03-21
1
收藏 3.84MB PDF 举报
室内定位与导航技术的影响;第二、分析基于 UWB/IMU 融合的定位与导航系统架构,包括传感器选择、数据融合算法、信息融合策略等;第三、通过实验验证基于 UWB/IMU 融合的室内定位与导航技术在不同场景下的性能表现,包括定位精度、稳定性、实时性等指标;第四、针对实验结果讨论系统存在的不足之处,并提出改进思路和方向;第五、总结论文研究工作,展望 UWB/IMU 融合技术在室内定位与导航领域未来的发展趋势。通过本文的研究,可以得出结论:基于 UWB/IMU 融合的室内定位与导航技术具有较高的定位精度和稳定性,在实际应用中具有广阔的发展前景,将为室内定位与导航技术的进一步发展提供重要参考。
在国内外研究现状方面,本文进行了系统性的综述分析,并指出了目前室内定位技术的主要问题所在。由于单一定位系统存在着一定的局限性,因此需要利用多传感器融合的方式来提高定位精度和稳定性。本文针对这一问题,结合 UWB(Ultra Wideband)测距技术和惯性导航系统,提出了一种新的定位与导航技术方案。通过对单一定位系统特征与固有缺陷的分析,本文设计了适用于不同应用场景的状态估计模型,包括基于卡尔曼滤波算法的多基站无线定位与惯性导航系统、基于图优化模型的单基站与行人航迹推算系统等。
在实验验证部分,本文通过对基于 UWB/IMU 融合的室内定位与导航技术在不同场景下的性能进行测试,得出了系统具有较高的定位精度、稳定性和实时性的结论。对系统存在的不足之处进行了深入分析,并提出了改进思路和方向。最后,对论文的研究工作进行总结,展望了基于 UWB/IMU 融合技术在室内定位与导航领域未来的发展趋势,强调了该技术在实际应用中的潜在优势和重要性。
综上所述,基于 UWB/IMU 融合的室内定位与导航技术是当前室内定位技术的重要发展方向之一。通过本论文提出的技术方案,可以有效提高室内定位精度和稳定性,为无人机、目标跟踪、VR/AR、扫地机器人、服务机器人、无人驾驶等领域的应用提供更加准确的位置服务和环境感知能力。未来,基于 UWB/IMU 融合技术在室内定位与导航领域的发展将更加广泛和深入,为室内定位技术的进一步创新和发展提供重要的技术支持和指导。
基于 UWB/IMU 融合的室内定位与导航技术研究
4
Stirling、Soehren 和 Castaneda 等采用加速度计检测加速或减速运动分割步行姿
态[8],[9],[10];Woodman、Cavallo 和 Rantakokko 等学者采用陀螺仪检测角速
度判断步行姿态[11][12][13]及其 Judd 结合加速度计和陀螺仪来实现步态检测
[14]。Jimenez 报告了根据阈值算法的检测误差:0.1%(加速度计)和 0.2%(陀螺
仪)[15]。ZUPT 算法意味着开环惯性数据积分在脚的摆动阶段才会发生。目前基
于 ZUPT/INS 系统通常表现为数米级别的误差。2005 年,ZUPT 首次由 Foxlin
运用在 NavShoe项目中的行人导航系统上下文中,并报告了良好的效果[16];2013
年德国卡尔斯鲁厄学院 Zwirello 采用 ZUPT 算法,采样加速度计、陀螺仪、磁力
计数据估计行人步长和步态[17]。
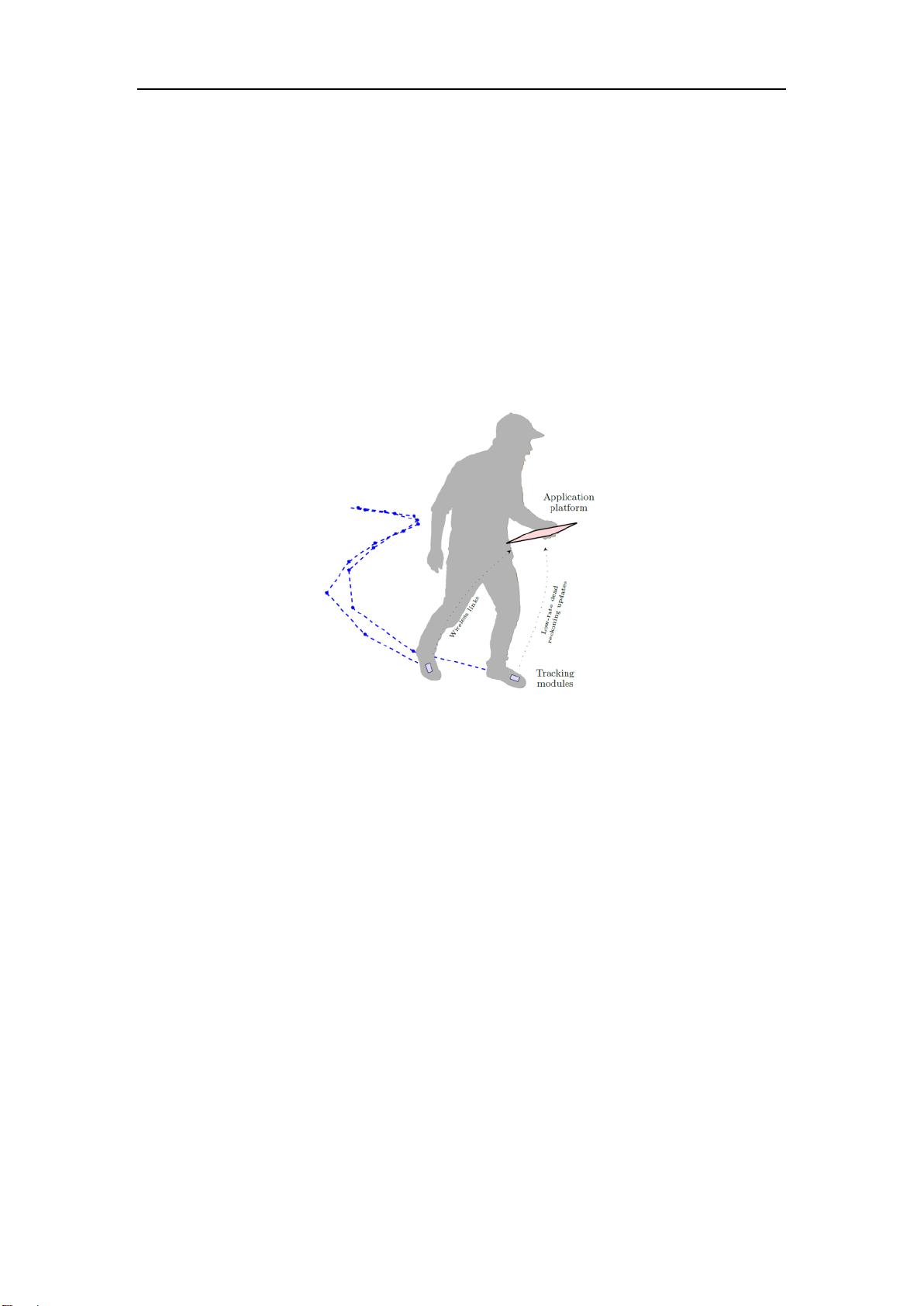
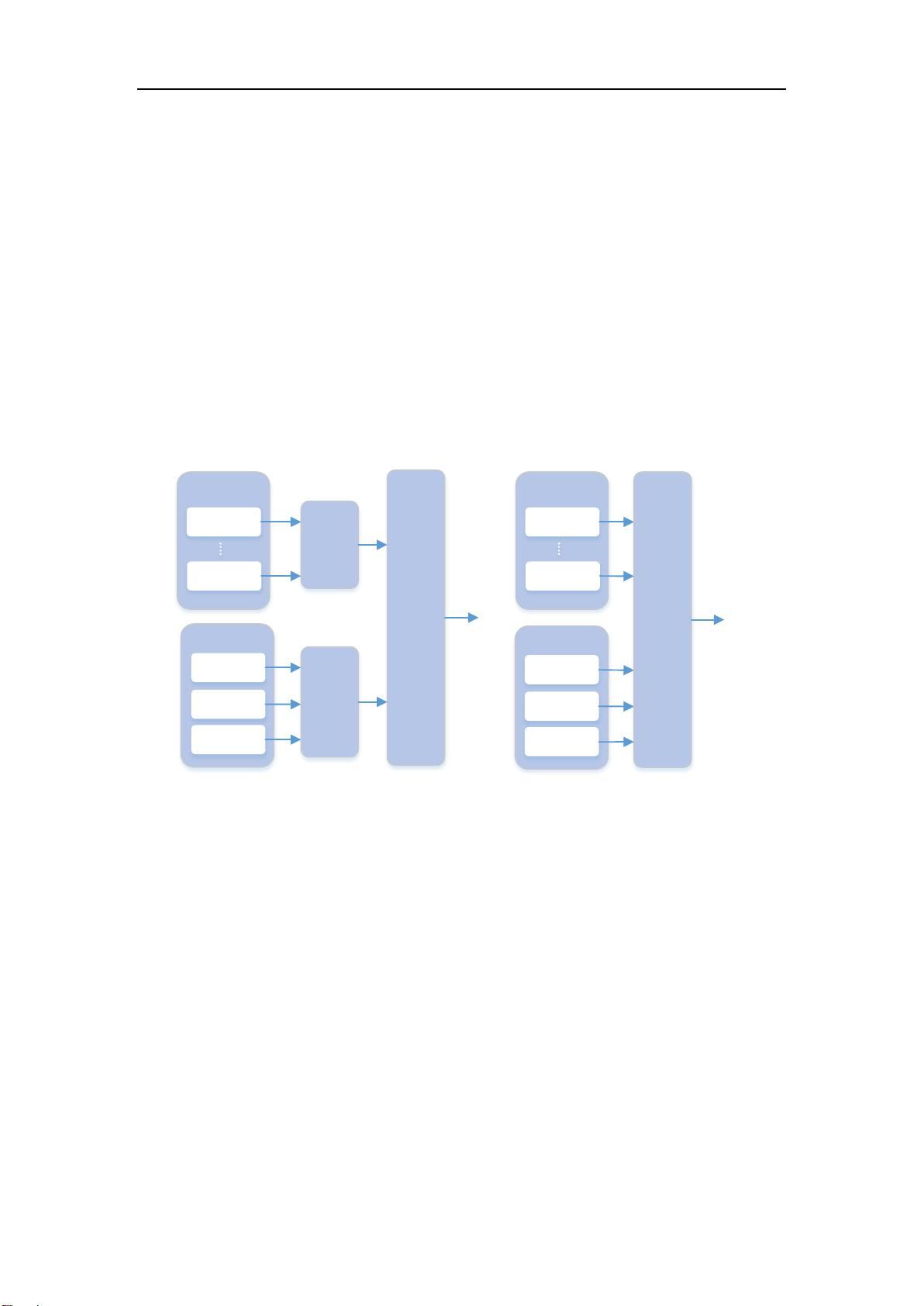
图 1.3 基于步态识别的行人航迹推算系统
然而站姿检测存在局限性,运动中衣物的变形和反弹会引起惯性传感器进行
附加的运动,这表明结合先验知识的阈值算法[18]计算出来的站姿周期并不够准
确。同时论文中大多测试通常在已知用户的初始位置并且被告知沿规定的路径行
走而不停止的情况进行。很少考虑更自然的情况,使用者可能避开障碍物,可能
坐下来挥动自己的双腿,可能漫无目的地漫步,或可能执行一些不寻常的活动,
如跳跃或跳绳。这种情况下基于 Foot-mounted 惯性导航应用实用性大大降低。
尽管如此,ZUPT 为主的 INS 已被证明在与建筑地图相结合,提供良好的中期跟
踪精度。
1.2.3 微惯性测量单元的研究现状
微惯性测量组件(Micro Inertial Measurement Unit,MIMU)是一种新兴、发展
迅速的微型惯性传感器。微惯性测量组件通常由加速度计和陀螺仪组成,它能够
测量载体的线性加速度和旋转角速度,因测量精度低、随机噪声大、受温度影响


剩余95页未读,继续阅读
2021-05-01 上传
2021-02-04 上传
2021-06-20 上传
2021-05-18 上传
2021-05-24 上传
2021-05-27 上传

王向庄
- 粉丝: 25
- 资源: 344
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
