Xilinx嵌入式开发:Ubuntu交叉编译环境搭建与Linux内核编译指南
需积分: 31 73 浏览量
更新于2024-07-15
收藏 5.22MB DOCX 举报
该文档详细介绍了如何在Ubuntu 16环境下搭建针对Xilinx数字板的交叉编译环境,包括了从基础概念、Xilinx产品系列介绍到具体的操作步骤,如Ubuntu下安装IA32-libs库、配置虚拟机的多网卡、设置NFS服务、下载交叉编译器、构建文件系统、安装Petalinux和Vivado、编译Linux内核、构建Device Tree Compiler以及烧录文件系统到Flash内存等。
1. 基础概述
- Flash内存:一种非易失性存储器,常用于保存设置信息和程序代码。分为NOR和NAND两种类型,NOR适合快速读取,NAND则在存储密度和写入速度上有优势。
2. Ubuntu 16搭建LINUX交叉编译环境
- IA32-libs库:在64位Ubuntu上安装32位库,用于支持某些32位软件。
- 虚拟机配置两块网卡:为了实现主机与虚拟机间的通信和数据传输,通常需要配置多网卡。
- NFS服务:网络文件系统,允许网络中的计算机共享文件和目录。
3. Petalinux安装(Windows下安装Vivado)
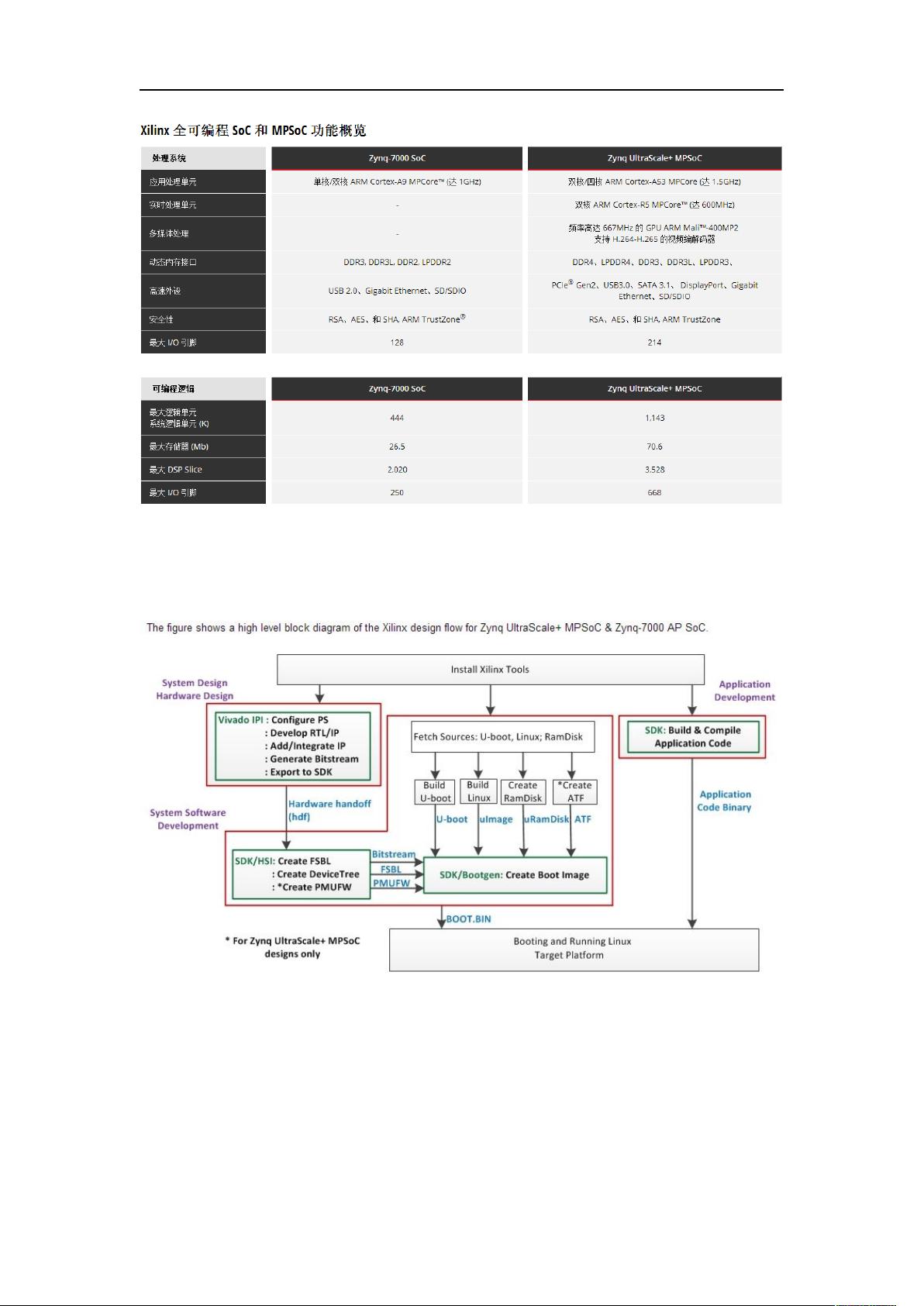
- Petalinux是Xilinx提供的嵌入式Linux开发工具,用于创建自定义的嵌入式Linux系统。
- Vivado是Xilinx的硬件设计工具,用于FPGA开发。
4. 编译LINUX内核
- 内核编译是定制嵌入式系统的重要环节,可以根据需求选择特定功能并优化性能。
5. Build Device Tree Compiler
- Device Tree是描述硬件信息的一种方式,用于在Linux启动时加载设备驱动和配置。
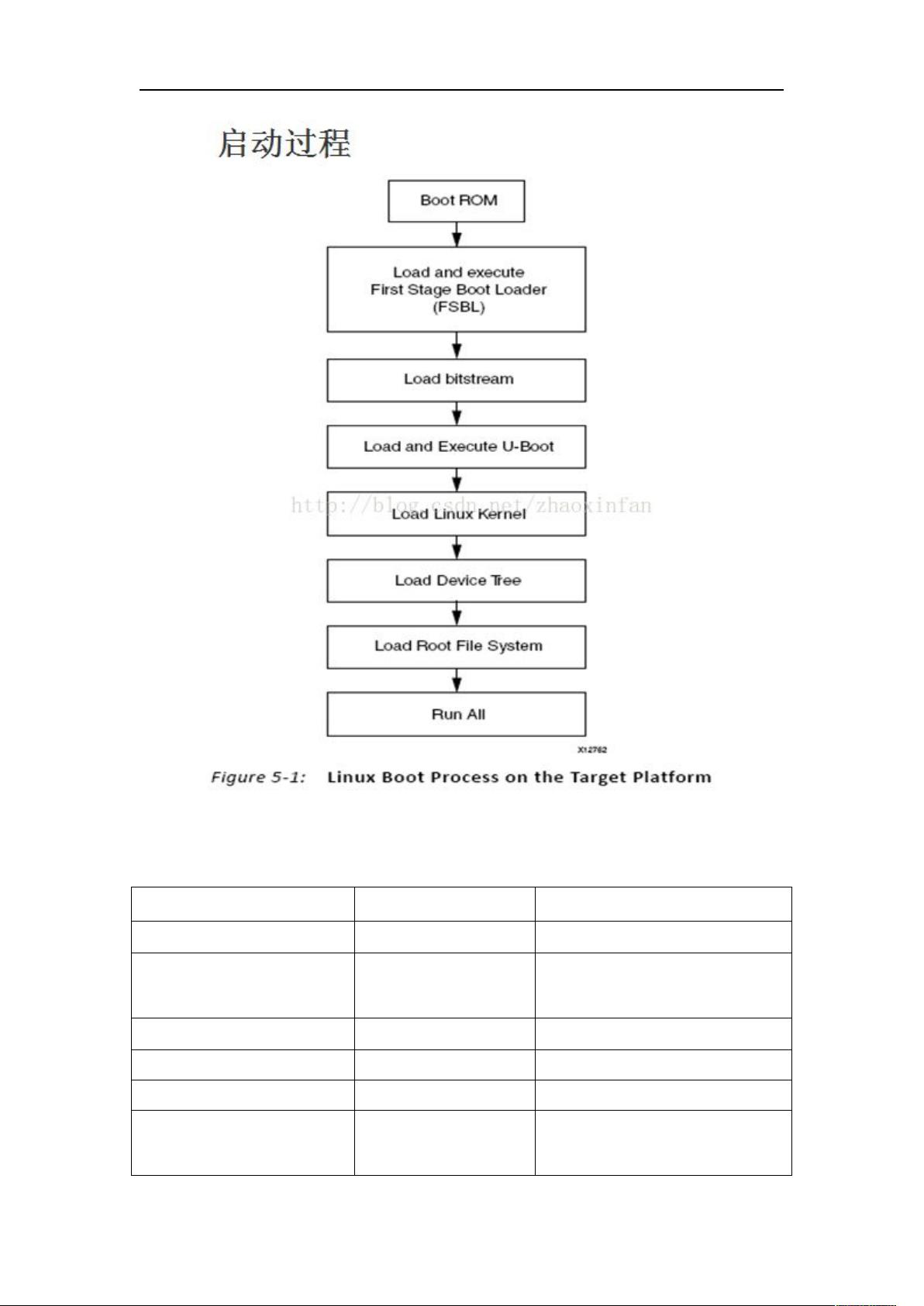
6. Build U-Boot
- U-Boot是Bootloader的一种,负责加载操作系统到内存中执行。
7. 嵌入式文件系统
- 文件系统制作涉及创建和定制适应嵌入式设备的文件结构和内容。
- 只读文件系统可以节省存储空间,提高系统稳定性。
- Flash存储:由于Flash的特性,烧录到Flash的文件系统需要特殊处理。
- 烧录Flash文件系统:将编译好的文件系统映像写入Flash芯片。
8. Build Device Tree Blob
- Device Tree Blob是编译后的设备树源码,包含了硬件配置信息。
9. ARM
- ARM架构是广泛应用于嵌入式和移动设备的处理器架构。
10. Shell基础
- Shell是Linux系统中的命令行接口,用户可以通过Shell命令与系统交互。
整个文档详尽地指导了从基础准备到实际操作的全过程,对于进行Xilinx平台的嵌入式开发非常有帮助。通过这些步骤,开发者能够构建出一个完整的交叉编译环境,以编译适用于Xilinx硬件平台的Linux系统。
技术方案
2.3总体流程
剩余39页未读,继续阅读
657 浏览量
333 浏览量
1082 浏览量
2021-10-30 上传
192 浏览量
524 浏览量
2023-02-22 上传

厚宇
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python大数据应用教程:基础教学课件
- Android事件分发库:对象池与接口回调实现指南
- C#开发的斗地主网络版游戏特色解析
- 微信小程序地图功能DEMO展示:高德API应用实例
- 构建游戏排行榜API:Azure Functions和Cosmos DB的结合
- 实时监控系统进程CPU占用率方法与源代码解析
- 企业商务谈判网站模板及技术源码资源合集
- 实现Webpack构建后自动上传至Amazon S3
- 简单JavaScript小计算器的制作教程
- ASP.NET中jQuery EasyUI应用与示例解析
- C语言实现AES与DES加密算法源码
- 开源项目实现复古游戏机控制器输入记录与回放
- 掌握Android与iOS异步绘制显示工具类开发
- JAVA入门基础与多线程聊天售票系统教程
- VB API实现串口通信的调试方法及源码解析
- 基于C#的仓库管理系统设计与数据库结构分析
