基恩士UR无序抓取指南:视觉系统与程序编辑
需积分: 9 58 浏览量
更新于2024-06-26
1
收藏 1.53MB PDF 举报
基恩士的"无序抓取指南-UR"是一份详细的手册,专注于3D无序抓取技术在UR机械手系列(如UR3、UR5、UR10,信息以基恩士官网为准)上的应用。该手册的目的是为了帮助用户实际操作过程中更好地理解和利用视觉系统,即CV-X系列控制器,来编写和执行机械手程序。手册涵盖了以下几个关键知识点:
1. 3D机械手视觉系统:手册首先介绍了3D视觉系统在抓取过程中的关键作用,它能帮助机械手精确识别和定位工件,即使在无序环境中也能实现高效抓取。
2. 程序编辑:
- 运用程序概要:阐述了运用程序的概念,它是机械手操作的核心,负责指导机器人的运动和任务执行。
- 编辑步骤:详细指导了编辑运用程序的流程,包括前期准备工作,以及在不同情况下的程序设计,如抓取每个工件前后,或者在机械手执行特定指令时的操作。
3. 常见编辑技巧:
- 执行指令:介绍如何通过运用程序传达具体操作命令,确保机械手能够按照预设的指令动作。
- 抓取判断:说明如何设计程序来检测抓取状态,以便在抓取所有工件后执行后续操作。
- 避免干涉:当机械手到达预设自动位置时,可能会与其他设备点群冲突,手册提供了避免这种情况的方法。
- 重复抓取:针对需要重复抓取同一工件的情况,手册提供了编程策略。
4. 安全注意事项:强调了本手册并非机械手安全运行的保证,使用者必须理解和遵守安全规定,自行采取措施确保机械手及其系统的整体安全,同时基恩士对由于用户使用不当造成的损失不承担责任。
通过这份指南,用户不仅可以学习到无序抓取的具体操作方法,还能了解到如何在实际场景中灵活应用视觉系统,提升机械手的作业效率和安全性。
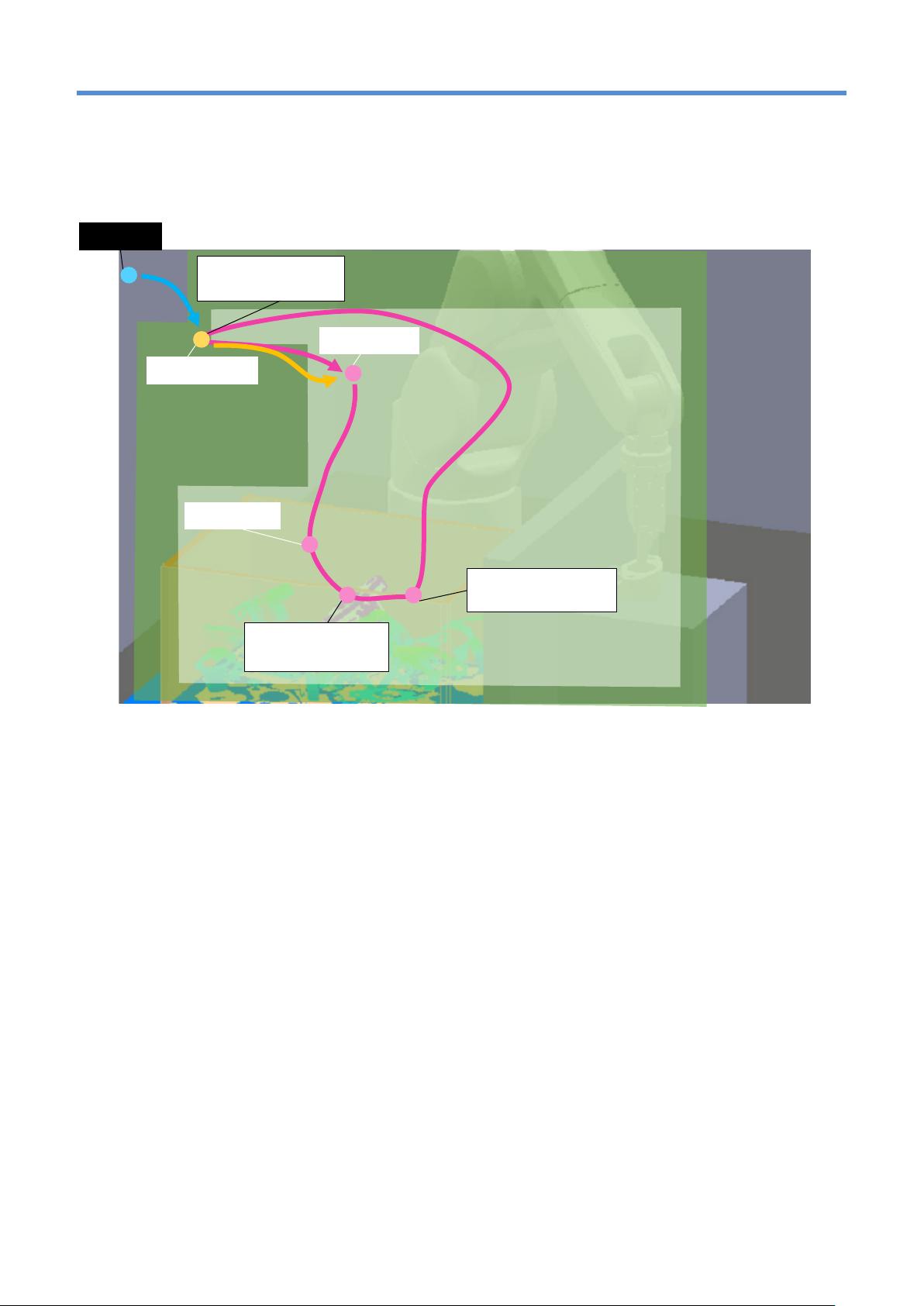
运用程序的概要
| 6
- 3D 机械手视觉系统 应用程序版介绍指南 UNIVERSAL ROBOTS 篇-
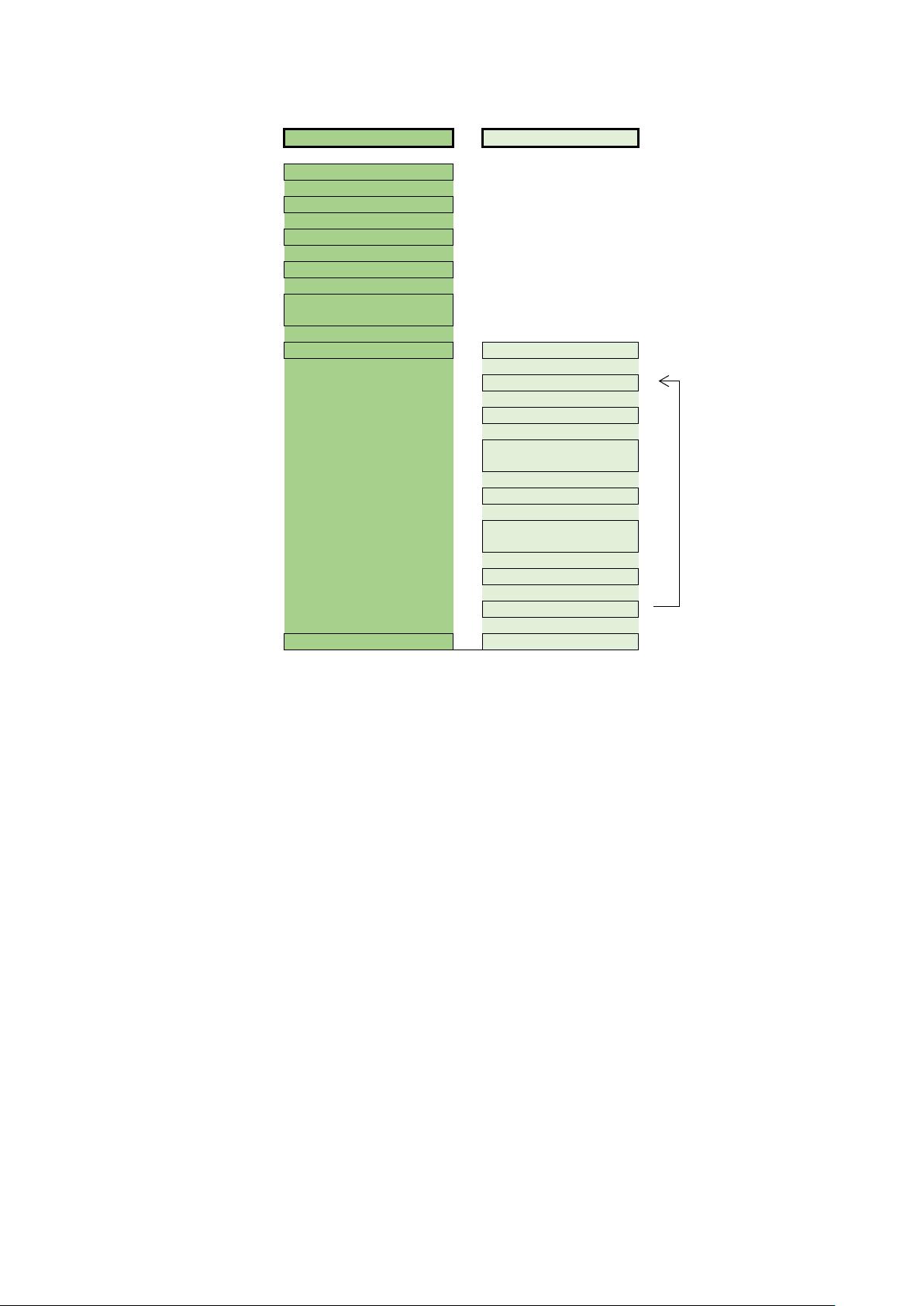
■“上拉”时序图
KeyOperation.urp
KUtilMoveAlongPath
Init Variables
↓
BeforeStart
↓
Robot Program
↓
向拍摄开始位置移动
↓
触发输出
Issues the trigger
↓
KUtilMoveAlongPath 的执行
→
开始
↓
移到盒子上空位置
↓
移到接近位置
↓
移到抓取位置
KeyActAtGripPos 的执行
↓
移到离开位置
↓
移到放置位置
KeyActAtPlacePos 的执行
↓
触发输出
↓
移到盒子上空位置
↓
结束
←
结束
剩余30页未读,继续阅读
2021-11-08 上传
2021-11-08 上传
2021-11-08 上传
2023-05-01 上传
2023-08-20 上传
2024-10-27 上传
2024-05-15 上传
2023-05-23 上传
2023-10-21 上传

锋利成
- 粉丝: 5657
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
