卡尔曼滤波器入门:概率、随机变量和状态空间模型
需积分: 9 124 浏览量
更新于2024-07-26
收藏 758KB PDF 举报
"卡尔曼滤波器入门"
卡尔曼滤波器是一种数学算法,用于估计系统状态,广泛应用于自动控制、机器人、计算机视觉、信号处理等领域。下面是对卡尔曼滤波器的详细介绍。
**概述**
卡尔曼滤波器(Kalman Filter)是一种递归最小二乘估计器,用于估计线性动态系统的状态。它于1960年代由Rudolf Kalman提出的,自此成为一个经典的算法,广泛应用于各种领域。
**概率论和随机变量**
在了解卡尔曼滤波器之前,需要了解一些概率论和随机变量的基本概念。概率论是研究随机事件的数学理论,它提供了一种描述不确定性的方法。随机变量是指其取值具有随机性的变量,例如抛掷骰子的结果。
**随机过程**
随机过程是指随着时间或其他变量变化的随机变量序列。例如,股票价格的变化、气温的变化等。卡尔曼滤波器可以用于估计随机过程的状态。
**状态空间模型**
状态空间模型是指将系统的状态表示为一个状态向量,例如机器人的位置和速度等。卡尔曼滤波器可以用于估计状态空间模型的状态。
**卡尔曼滤波器算法**
卡尔曼滤波器算法可以分为两个阶段:预测和更新。预测阶段,使用当前状态和模型参数来预测下一个状态。更新阶段,使用当前测量值和预测值来更新状态估计值。
**离散卡尔曼滤波器**
离散卡尔曼滤波器是一种特殊的卡尔曼滤波器,用于离散时间系统的状态估计。它广泛应用于自动控制、机器人等领域。
**扩展卡尔曼滤波器**
扩展卡尔曼滤波器是卡尔曼滤波器的一种变种,用于非线性系统的状态估计。它可以处理非线性系统的状态估计问题。
**参数估计**
参数估计是卡尔曼滤波器中的一个重要问题,用于估计模型参数。参数估计可以使用 Maximum Likelihood Estimation(MLE)或Bayesian Estimation等方法。
**多模态滤波器**
多模态滤波器是一种特殊的卡尔曼滤波器,用于多模态系统的状态估计。它可以处理多模态系统的状态估计问题。
**混合或多传感器融合**
混合或多传感器融合是卡尔曼滤波器的一种应用,用于融合多个传感器的测量值以提高状态估计的精度。
卡尔曼滤波器是一种强大的数学工具,广泛应用于自动控制、机器人、计算机视觉、信号处理等领域。了解卡尔曼滤波器的原理和算法,可以帮助我们更好地解决实际问题。
SIGGRAPH 2001, Los Angeles, CA, August 12-17, 2001
12
Bayes’ Rule
In addition, Bayes’ rule follows from (2.3), offering a way to specify the probability
density of the random variable given (in the presence of) random variable . Bayes’
rule is given as
.
Continuous-Discrete
Given a discrete process and a continuous process , the discrete probability mass
function for conditioned on is given by
. (2.16)
Note that this formula provides a discrete probability based on the conditioning density,
without any integration. See (Kelly 1994) p. 546 for further explanation and proofs of the
above.
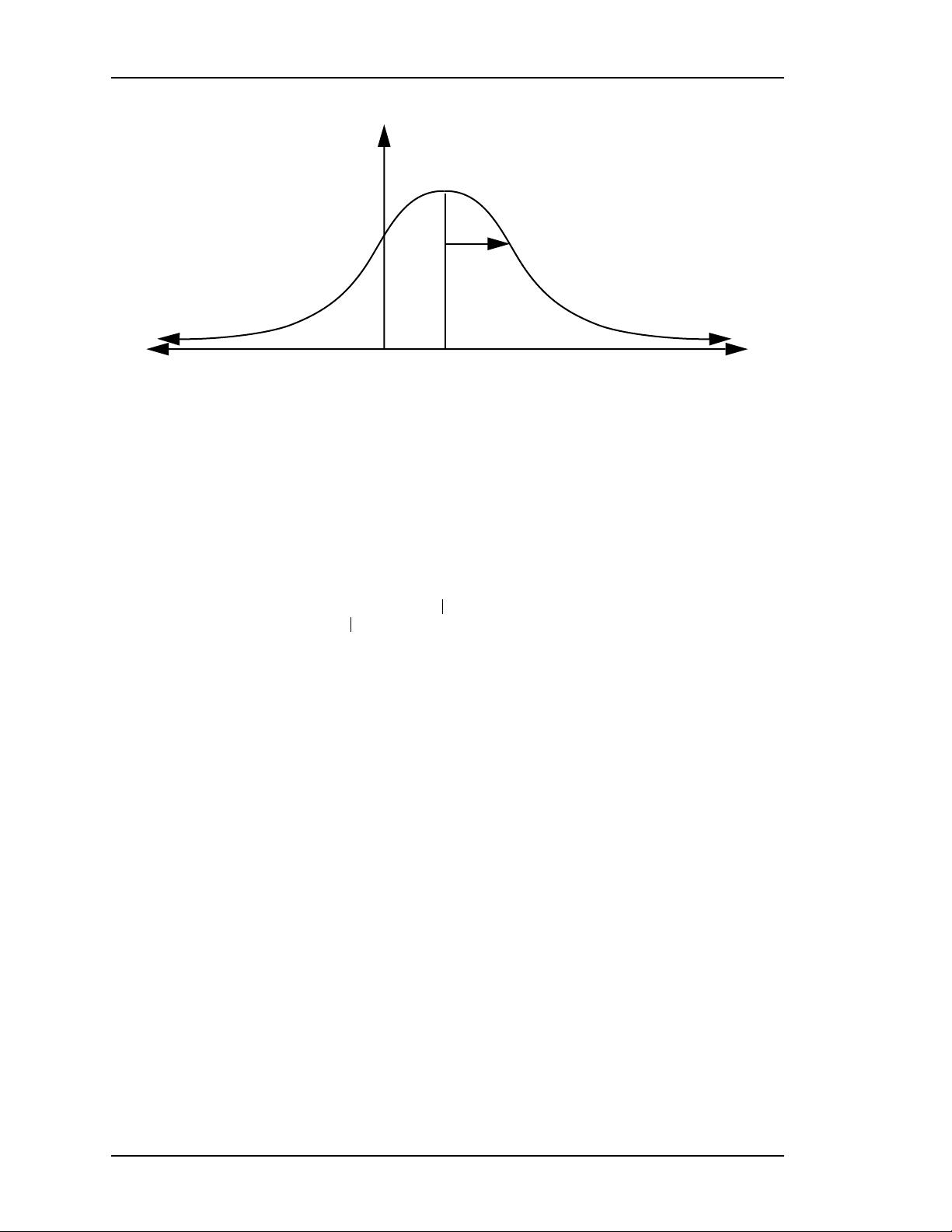
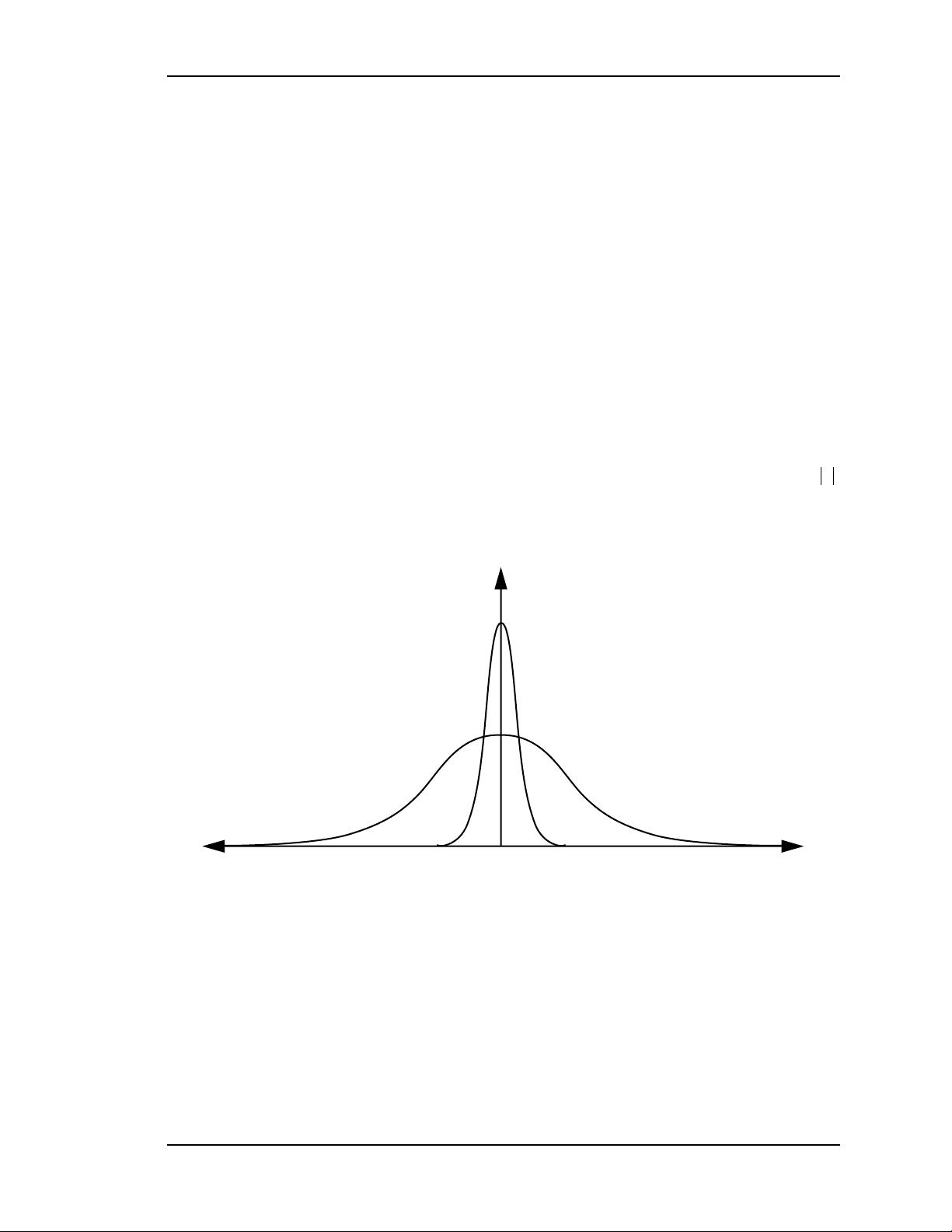
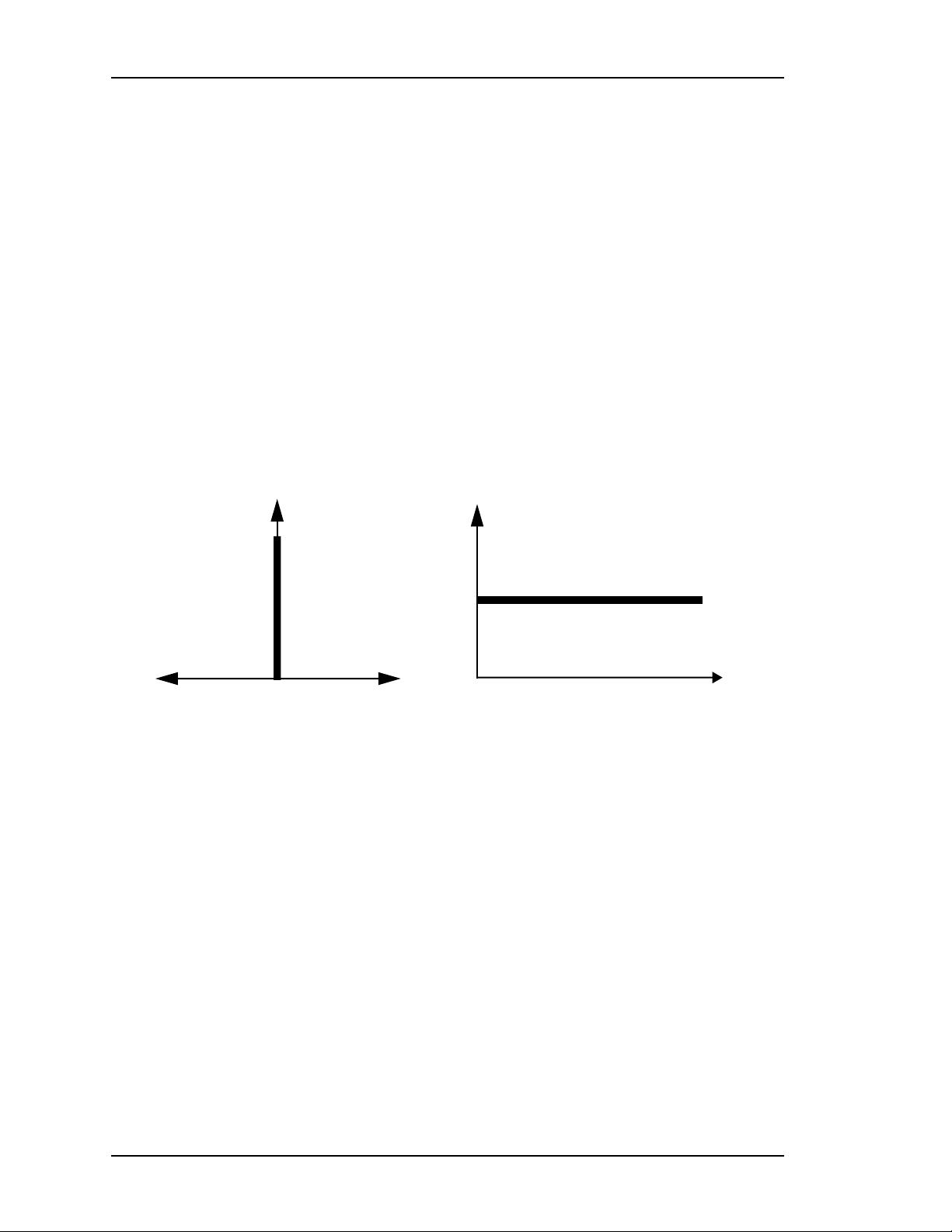
2.6 Spatial vs. Spectral Signal Characteristics
In the previous sections we looked only at the spatial characteristics of random signals. As
stated earlier, the magnitude of the variance of a signal can give us a sense of how much
jitter or “noise” is in the signal. However a signal’s variance says nothing about the
f
X
x()
σ
x ∞→x ∞–→
m
x
0
Figure 2.1: The Normal or Gaussian probability distribution function.
XY
f
XY
x()
f
YX
y()f
X
x()
f
Y
y()
-----------------------------------=
XY
XYy=
p
X
x | Yy=()
f
Y
y | Xx=()p
X
x()
f
Y
y | Xz=()p
X
z()
z
∑
-------------------------------------------------------=

剩余80页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2014-10-19 上传
108 浏览量
2021-10-03 上传
2021-05-31 上传
2011-03-04 上传
2012-11-10 上传

mengdixin
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
