ROS与RGB-D传感器在SLAM智能机器人中的应用研究
"基于ROS和RGB-D传感器的SLAM智能机器人"
本文主要探讨的是基于ROS(Robot Operating System,机器人操作系统)和RGB-D(红绿蓝-深度)传感器的SLAM(Simultaneous Localization and Mapping,同时定位与建图)技术在智能机器人领域的应用。SLAM是机器人自主导航的关键技术之一,它允许机器人在未知环境中实时建立地图的同时进行自我定位。
首先,论文详述了智能移动机器人的机械设计环节,涵盖了材料选择、结构设计和动力系统等方面的考量。这部分旨在为机器人提供可靠的物理基础,确保其能够适应各种环境并执行预定任务。
其次,理论分析部分深入剖析了机器人运动学模型,这是理解机器人动态行为的基础。此外,航迹推算(Odometry)用于估算机器人自身的位置和姿态变化,是SLAM算法的重要输入。SLAM算法则通过融合来自RGB-D传感器的数据,实现在未知环境中的自定位和环境建模。主动定位(Active Localization)则是SLAM的一个扩展,它允许机器人根据目标或任务需求选择最佳观测点。路径规划算法是另一关键部分,它决定了机器人如何有效地在环境中移动,避免障碍并达到目的地。
硬件设计部分,作者提到了上下位机系统的构造,这通常包括主控计算机(上位机)和负责实时数据处理及低级控制的微控制器(下位机)。RGB-D传感器如Kinect或RealSense等,作为感知环境的主要设备,其硬件接口设计和信号处理是这一阶段的重点。
软件设计部分,作者阐述了ROS在上下位机之间的通信机制,以及如何利用ROS节点和消息传递机制实现数据的获取、处理和控制指令的发送。此外,调试方法的介绍对于解决实际开发中遇到的问题至关重要。
通用性设计关注移动机器人底盘的软硬件可复用性,这意味着设计应具有一定的灵活性,可以适应不同的传感器配置和任务需求。
最后,实验结果与分析展示了智能机器人在实际场景中的表现,包括建图精度、定位误差和路径规划的有效性等。这部分的实验数据和分析有助于验证设计方案的可行性,并为后续改进提供依据。
这篇本科毕业论文不仅是作者个人研究的成果,也是对现有智能机器人技术的探索和贡献。作者表达了对提供帮助的团队的感激,并提供了个人联系方式,鼓励同行交流和批评指正。整个项目资料可供学习者免费下载,以促进学术交流和知识传播。
基于 ROS 和 RGB-D 传感器的 SLAM 智能机器人_OARAP.org
4
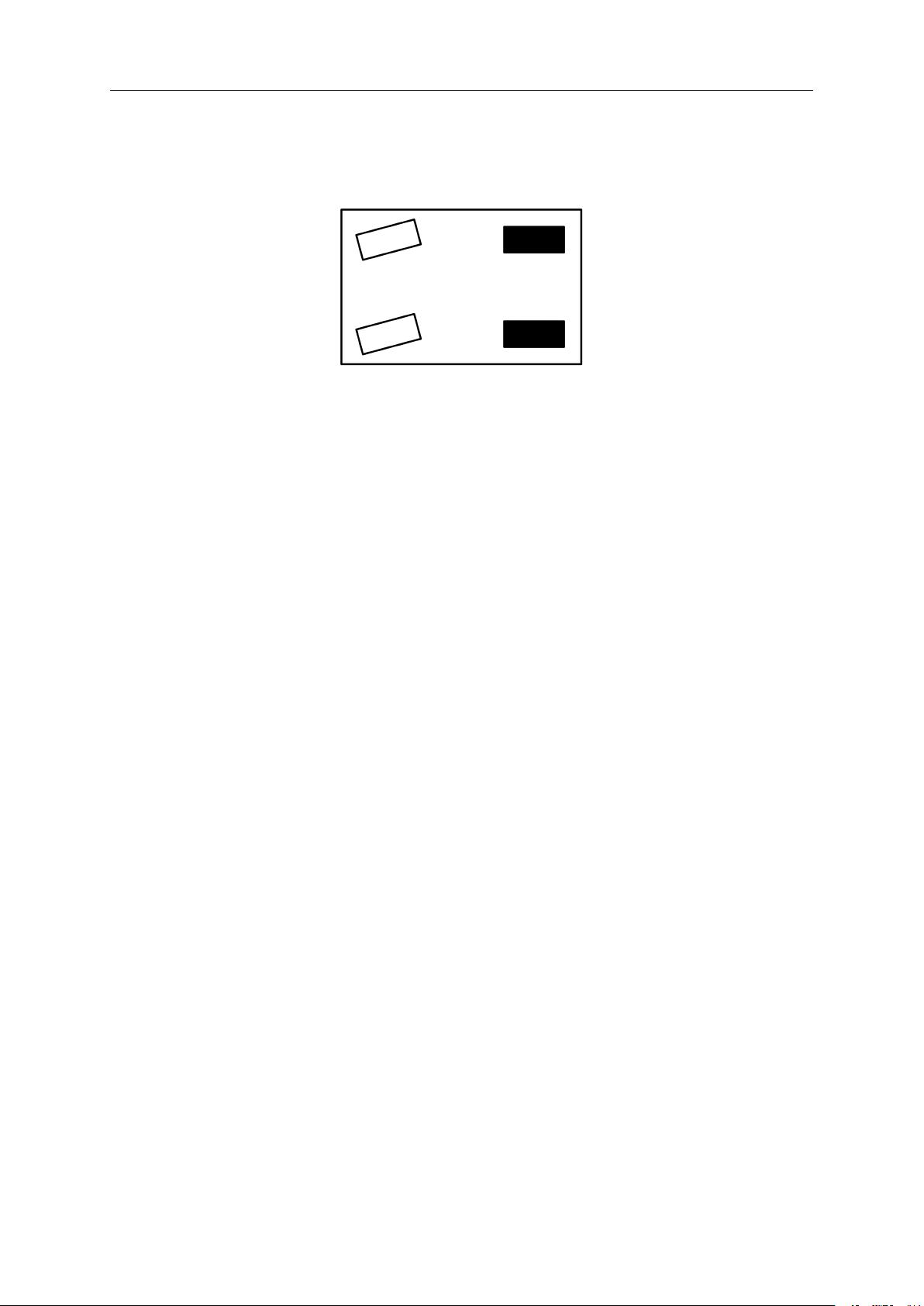
表动力轮,透明填充代表无动力轮,矩形代表标准轮,圆形代表小脚轮,斜条纹代表麦
克纳姆轮,纵条纹代表全向轮。
图 2-1 本设计中机器人底盘运动模型
Fig.2-1 In the design of the robot motion model of the chassis
图 2-1 中所示的模型为本设计使用的方案,底盘共连接四个轮子,其中前面为两个
为独立驱动轮,后面两个为独立的小脚轮,前面两个轮子通过差速的方式改变机器人的
运动方式和状态。差速运动的底盘数学模型要比全向底盘、多足底盘、带差速器的底盘
要简单,实际的可控性好过由全向轮或麦克纳姆轮构成的全向底盘,机动性相比带差速
器底盘要好,全向的底盘对地面光泽度要求较高,而履带式和腿足式机器人优秀的越野
能力又无用武之地,所以本设计选用了前面两个独立驱动轮,后面两个小脚轮这种方案
[3]
。
2.2 机械结构
为保证刚度的情况下减轻重量,本设计中的轮式机器人底盘使用
4mm
厚,面积为
415mm*315mm 的铝合金板,支架使用了高强度轻质镂空的角钢,其上面的大面积规则
镂空孔洞可以更方便调节高度、增减模块等,提高了移动机器人机械上的可扩展性。
本设计中的机器人可分为上下两,上层有电源开关、充电接口、显示器等便于开发
者操作和查看,甚至还可以放置一把键盘,在调试程序的时候跟方便快捷。将机器人分
层设计后,缩小了机器人的占地面积,灵活性和舒适度上都相比单层式结构有了提升。
设计中的驱动轮外径 150mm,轮宽 24mm,胎面是优质 PU 橡胶,保证了在与地面
接触时足够的摩擦力。万向轮外径
100mm
,轮宽
32mm
,胎面材质为橡胶,具有防滑、
耐磨的特性。


剩余81页未读,继续阅读
2024-03-21 上传
2024-01-13 上传
点击了解资源详情
2021-05-11 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

亲亲猪儿虫
- 粉丝: 72
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
