六自由度3-RRRS并联机器人位姿解析研究
需积分: 22 73 浏览量
更新于2024-08-12
1
收藏 980KB PDF 举报
"这篇论文详细探讨了一种六自由度3-RRRS并联机器人机构的位姿正逆解。3-RRRS并联机器人是一种具有六个自由度的机器人结构,由三个相同结构的RRRS(旋转-旋转-旋转-滑动)分支机构支撑,这种机构在机器人和自动化设备如并联机床中有广泛应用。论文指出,相比于传统的SPS(滑动-旋转-旋转)并联机器人,3-RRRS机构具有更简单的位姿正逆解表达式,计算简便,且具备结构简洁、位姿空间大、易于控制的优点。"
在本文中,作者钱瑞明首先介绍了并联机器人的优势,包括高刚性、高承载能力和高精度运动,这使得它们在机器人技术和自动化设备中具有重要地位。特别是,3-RRRS并联机器人机构因其独特的结构特性,被用于需要精确操作的场景,例如三指机器人手对物体的接触操作。
作者接着阐述了所提3-RRRS机构的位姿正逆解问题。位姿正解是指从机器人末端执行器的位置和姿态推导出各个关节角度的解决方案,而位姿逆解则是相反的过程,即从给定的关节角度确定末端执行器的位置和姿态。对于3-RRRS机构,位姿正解有4组,这意味着机器人可以有四种不同的运动状态达到同样的工作空间位置,而位姿逆解则有8组,表明给定一个末端位置和姿态,有多种可能的关节角度组合来实现这一位置。
论文中,作者通过详细分析3-RRRS并联机器人机构的几何关系,建立了位姿正逆解的解析表达式。这些解析表达式简化了解决复杂高阶多项式方程组的问题,使得求解过程更为高效。此外,作者还强调了这些解析解对于并联机器人运动学、动力学研究以及运动控制的重要性,因为它们为理论研究、解的优选和最优控制策略的实现提供了理论基础。
总结来说,这篇2000年的论文揭示了3-RRRS并联机器人机构在位姿解算上的独特性和实用性,为后续的并联机器人研究提供了重要的参考和工具。通过对这一机构的位姿正逆解的深入研究,不仅扩展了并联机器人理论的理解,也为实际应用中的机器人控制优化开辟了新的路径。
第 30卷第 5期
2000年 9月
东 南 大 学 学 报
(自 然 科 学 版 )
JOURNAL OF SOUTHEAST UNIVERSITY(NaturalScienceEdition)
Vol30 No5
Sept.2000
六自由度 3 RRRS并联机器人机构位姿正逆解
钱瑞明
(东南大学机械工程系,南京 210096)
摘 要 提出一种六自由度 3 RRRS并联机器人机构,建立了位姿正逆解的解析表
达式,其中位姿正解有 4组,位姿逆解有 8组.
关键词 并联机器人;3 RRRS机构;位姿正逆解
分类号 TP242
收稿日期:2000-04-12. 第一作者:男,1960年生,硕士,教授.
与开式串联机构相比,多环并联机构具有结构刚性大、承载能力高、运动精度高、便于控制
等优点,因而在机器人和自动操作机械(如并联机床
[1]
)中有很大的应用价值.在机器人应用
领域,以 SPS为分支机构的并联机器人自 1965年由 Stewart
[2]
提出后,已引起许多学者对其进
行深入研究
[3~6]
.但由于结构的特殊性,以 SPS为分支机构的并联机器人位姿正解相当复杂,
通常需求解高阶多项式方程组,从而影响了基于位姿正解的有关问题的深入研究.本文提出一
种六自由度
3 RRRS并联机器人机构,并具体讨论其位姿正逆解.与 SPS类并联机器人机构
相比,该机构位姿正逆解具有简单解析表达式,计算方便,且具有结构简单、位姿空间大、便于
控制等特点,在机器人和并联机床领域具有广泛的应用价值,例如当以 RRR为手指机构的三
指机器人手通过指端与物体的固定点接触实现对物体的操作时,即属此种 3 RRRS并联机
构.由于并联机器人机构的位姿关系及求解算法是其运动学、动力学研究和运动控制的基础,
因此本文建立的 3 RRRS并联机器人机构位姿正逆解求解算法,将为其理论研究、解的选优
和实现最优控制提供理论基础.
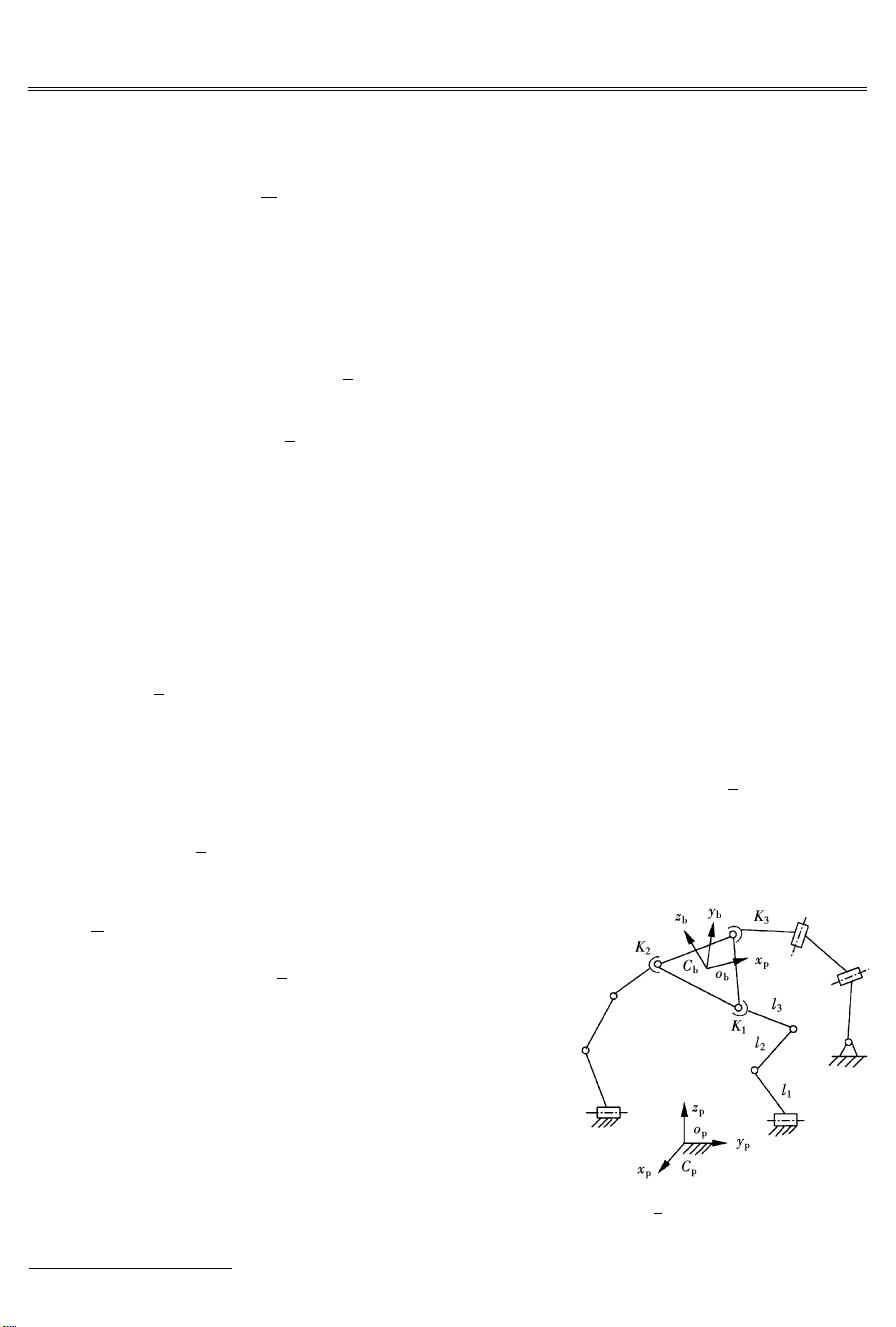
图 1 3 RRRS并联机器人机构
1 3 RRRS并联机器人机构位置关系
图1所示为六自由度3 RRRS并联机器人机构简图,其
中上平台
△
K
1
K
2
K
3
为执行构件,由 3个结构 尺寸相同 的
RRRS分支机构(见图2)支撑,9个转动关节的运动存在 3个
约束方程,故其中 3个转动关节和3个球关节为被动关节.对
该机构建立如下坐标系:基础(固定)坐标系 C
p
;上平台坐标
系 C
b
,其中原点 o
b
位于
△
K
1
K
2
K
3
的形心,坐标平面 o
b
x
b
y
b
与
△
K
1
K
2
K
3
平面重合.对图 2所示分支机构建立如下坐标系:
分支固定坐标系
C
fi
(i=1,2,3为分支序号),其中,z
fi
为根关
节
θ
i1
的轴线方向;分支首杆坐标系 C
ai
,其中,x
ai
为首杆杆长
下载后可阅读完整内容,剩余4页未读,立即下载
2012-11-14 上传
2019-09-11 上传
2024-11-17 上传
2024-11-17 上传
2024-11-17 上传
2024-11-17 上传
2024-11-17 上传

weixin_38626179
- 粉丝: 4
- 资源: 959
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
