




车载稳像系统:小波增强的灰度投影算法
PDF格式 | 206KB |
更新于2024-08-30
| 80 浏览量 | 举报
"本文主要探讨了车载稳像系统的设计与实现,特别关注了在恶劣天气条件下,如何通过改进灰度投影算法来提升图像稳定效果。文章指出,车载成像技术对于未来的汽车智能化至关重要,但图像的不稳定性是需要解决的主要问题。现有的特征点法和灰度投影法各有局限,特别是在对比度低或者环境复杂的场景下。为解决这一问题,文中提出了采用小波边缘增强技术预处理图像,以增强灰度投影法在车载稳像应用中的性能。系统框图展示了电子稳像系统的基本构成,其中全局运动矢量估计是关键,灰度投影算法因其运算效率高和抑制噪声能力强而被选为运动估计算法。投影算法通过计算图像的灰度投影曲线来确定运动矢量,简化了运算过程,满足了实时性需求。"
关键词: 车载稳像系统, 灰度投影算法, 小波边缘增强, 运动矢量估计, 电子稳像, 图像稳定, 对比度增强
0引言
车载稳像技术对于提高车辆行驶安全性和驾驶舒适度具有重要意义。由于车辆在行驶过程中会经历各种颠簸和振动,导致摄像机捕获的图像序列不稳定,这对驾驶员的视觉判断和后续图像处理都造成了负面影响。因此,开发有效的车载稳像系统显得尤为必要。
1车载稳像系统
车载稳像系统通过电子设备和数字图像处理技术,计算图像序列的运动矢量并进行补偿,以减少图像抖动。系统的核心是全局运动矢量估计,其准确性和实时性直接影响到系统的整体性能。系统框图清晰地展示了各组成部分的功能,尤其是运动估计算法的选择对于整个系统的效能至关重要。
1.1运动矢量估计算法的选择
灰度投影算法被选为本车载稳像系统中的运动估计方法,因为它具备运算量小、速度快和抗噪声能力强的特点。尽管它对图像的对比度有一定要求,但通过引入小波边缘增强技术,可以有效提升在低对比度和复杂环境下的稳定效果。这种方法能够改善传统投影法在恶劣天气条件下的表现,从而提高整体的稳像精度。
2小波边缘增强
小波分析能够对图像进行多尺度分解,突出边缘细节,增强图像的对比度。在预处理阶段应用小波边缘增强,可以更好地识别图像中的运动信息,即使在雨雾等恶劣环境下,也能提供更准确的运动矢量估计。
3结论
车载稳像系统通过结合灰度投影算法和小波边缘增强技术,能够克服传统方法的局限,提高在各种环境条件下的图像稳定性能。这种设计不仅有利于提升驾驶体验,也为车载成像技术在自动驾驶和智能交通系统中的应用奠定了基础。未来的研究将进一步优化这种融合方法,以适应更多复杂环境和更高的稳像需求。
车载稳像系统的设计与实现车载稳像系统的设计与实现
灰度投影算法是车载视频稳定当中应用较多的运动估计算法,然而投影法对图像的对比度有较高要求,而且在
恶劣天气情况下,针对直方图均衡化进行对比度增强效果不好,为此提出采用小波边缘增强的方法对图像进行
预
摘要:
关键词:
0 引言
车载成像技术是一种将成像设备置于车载平台的远距离、非接触获取目标图像的技术和方法,是未来汽车智能化的关键。
但是由于摄像机随车体晃动导致输出的图像序列不稳定,图像序列晃动量较大,易使观察者产生疲劳,也会严重影响后续处理
的精度,因此,必须对车载图像序列进行稳定。
目前,车载稳像技术使用较多的算法为特征点法和灰度投影法。特征点法能对任意形式的图像运动进行运动矢量估计,但
在处理一些画质较差,特征贫乏的图像时,精度往往很低,很难适应车载视频稳像的各种环境变化;灰度投影法只能处理只含
平移运动和较小旋转运动的情况,且要求图像有一定的对比度。而车载视频往往拍摄时路况环境比较复杂,如雨雾天气,这就
给算法处理的精度带来很大影响。本文针对这种情况,采用小波的方法对图像进行预处理,提高灰度投影法在车载稳像应用中
的抗干扰能力。
1 车载稳像系统框图
电子稳像是利用电子设备和数字图像处理技术相结合的方法,通过计算选定的参考帧图像和被比较的当前帧图像的运动矢
量,再根据获得的运动矢量按照某种准则对当前图像进行补偿,从而消除或减轻图像序列帧间的随机抖动,获得稳定的图像序
列。
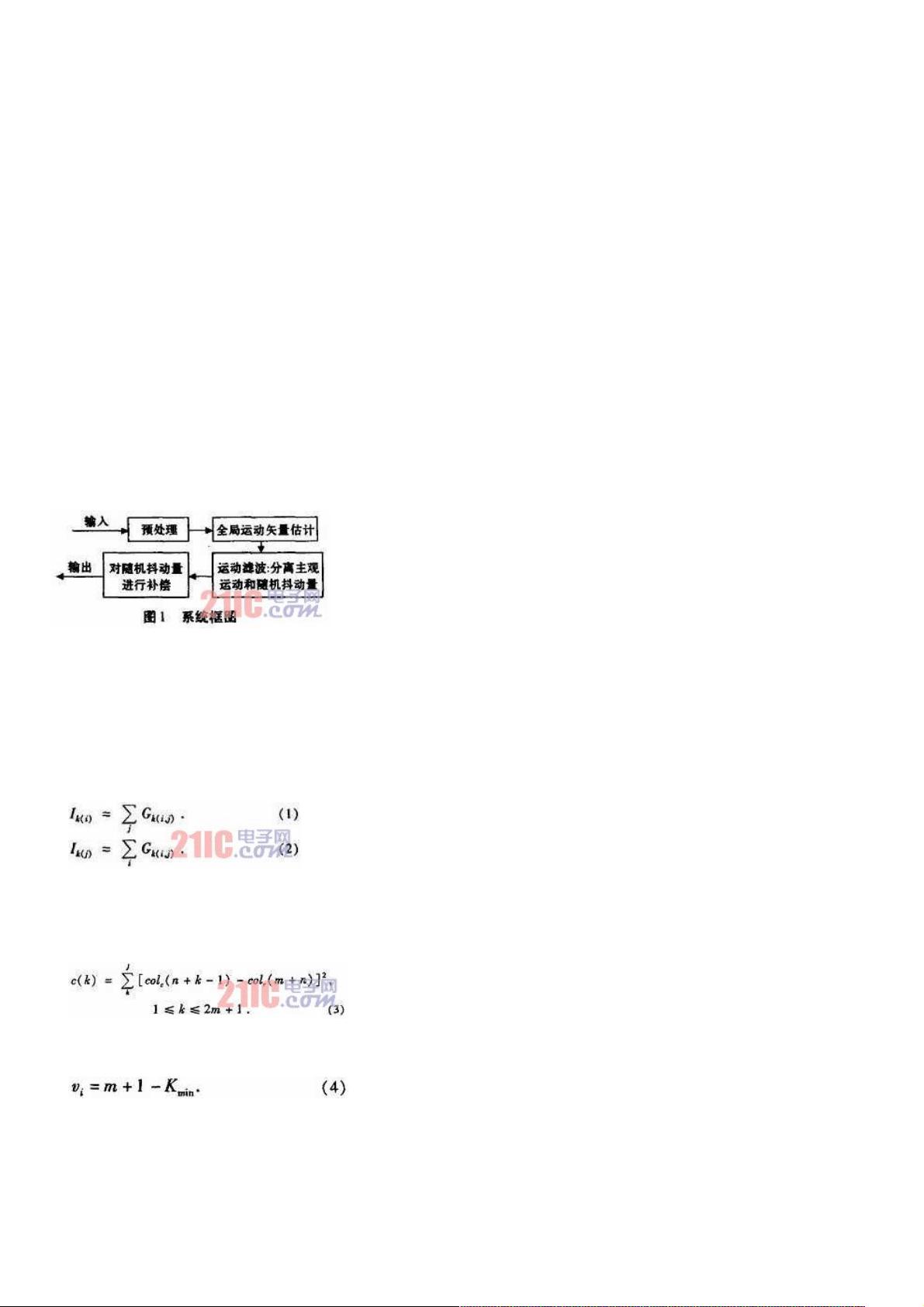
电子稳像作为车载稳像系统中的核心部分,其系统结构如图1所示。
其中,全局运动矢量估计是整个稳像系统的关键,它决定了稳像精度和耗时性。
1.1 运动矢量估计算法
通过对高速路抖动特点的分析,并且对目前在电子稳像中常用的运动估计算法进行各自优缺点的比较,本系统决定采用灰
度投影算法进行全局运动矢量估计。
灰度投影算法:投影法是利用图像总体灰度变化规律来确定图像运动矢量的一种方法,它不必对图像上的每一点做相关运
算,而是利用图像的灰度投影曲线做一次相关运算,因此它的运算量小,运动估计速度快,容易满足实时性要求,同时抑制噪
声的能力较强,并且在精度上也能较好地满足要求。
该算法首先通过投影公式将每一帧二维图像映射成两个一维波形,其行列灰度值累加表示为:
式中:Ik(i)代表第k帧图像第i行的灰度值,Ik(i)代表第k帧图像第j列的灰度值,Gk(i,j)为第k帧图像上(i,j)处的像素灰度值。
为了避免因图像抖动导致图像边缘信息发生变化,而影响互相关计算出的互相关曲线峰值,在进行互相关计算前,对图像
进行余弦滤波,去除图像边界信息波形而完整保留中心区域波形,减小边界信息对互相关计算的影响,提高计算精度。投影滤
波后,对参考帧和当前帧各分量的两条曲线进行相关计算,找到两条曲线的惟一谷值,即可确定出当前帧相对于参考帧的行列
运动偏移量。相关运算的公式为:
式中:colc(n)和colr(n)分别为第i帧和参考帧的在一个方向上的灰度投影值,J为两曲线中进行相关运算的单位长度,m为位
移矢量相对于参考帧在一侧的搜索宽度,即允许的最大正负抖动范围,m在1至2m+1间取值。当C(k)为最小值时,此时
k=Kmin,则第i帧图像相对于参考帧图像在一个方向上的位移矢量为:
以水平方向为例,vi为正时,表明当前帧相对参考帧向右移了|vi|个像素;为负时,表明向左移了|vi|个像素。同样的方法,
可以得到垂直方向的位移矢量。
1.2 针对雨雾天气的图像预处理
通过对灰度投影法原理的分析,可知灰度投影算法要求图像有一定的对比度,当图像灰度值单一并且对比度差时,利用灰
度投影算法对图像匹配会造成投影曲线很平,相关运算后波谷段平缓不易找到,难以找到正确的运动矢量。而雨雾天气是车辆
外出常常碰到的情况,恶劣天气也给投影算法带来很大影响。因此,需要对图像进行预处理。传统的预处理方法是通过直方图
均衡化进行,但这种方法存在丢失细节和过分增强的缺点,在增强图像对比度的同时也增强了图像的噪声,给后续算法在运动
矢量估计的精度上产生很大影响。因此,本文采用小波的方法,即图像经过小波变换分解为低频部分和高频部分,然后单独对
高频部分图像的边缘进行加强。具体实现方法如下:
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐


weixin_38680393
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java动画小程序及用户管理系统源码分析
- AccessControl模块4.0b5版本Python安装包
- CSS布局艺术:hs-interior设计之美
- Freetype 2.5.5 32位VC10版本压缩包介绍
- 品牌健康诊断工具:全面分析与市场调研指南
- GitHub上的个人作品集网站建设与HTML实现
- Python实现DIY字符画工具源码解析
- 深入安卓系统开发:Java源码解析与在线合同管理实战
- 物联网NB-IoT与LoRa:通信科技挑战与创新分析
- 用Go语言打造的HackerNews新闻浏览CLI工具
- Android版NS-USBloader移动:Tinfoil、Awoo、GoldLeaf文件上传解决方案
- 掌握Java实战:会员积分消费系统源码解析
- 揭秘火星漫游者:探索好奇号相机的CRX插件
- JavaFX考勤系统:自用GUI设计与实现
- Python包Access_Modify版本1.0.3发布与使用指南
- Verilog源代码与testbench集锦:实用与模型设计





















