STRUCK:结构化输出的目标跟踪算法
需积分: 50 14 浏览量
更新于2024-09-09
收藏 950KB PDF 举报
"STRUCK(Structured Output Tracking with Kernels)是一种高效的目标跟踪算法,它采用了结构化输出的概念,旨在解决传统跟踪方法中的问题,如中间分类步骤和目标位置估计的不准确性。该方法由Sam Hare、Amir Saffari和Philip H.S. Torr共同提出,分别来自牛津布鲁克斯大学和索尼计算机娱乐欧洲公司。
在STRUCK中,目标跟踪被视为一个结构化输出任务,而非传统的分类任务。这种方法的优势在于,它可以避免将估计的目标位置转化为带有标签的训练样本这一中间步骤,这通常在传统方法中是必要的,但并不总是最佳策略。通过直接预测目标位置的变化,STRUCK能够更直接地优化跟踪过程,提高位置估计的精度。
STRUCK的核心是在线支持向量机(SVM)分类器,它能够自适应地更新对象模型。在线学习技术被用于处理跟踪过程中环境和目标的动态变化。然而,与常规在线学习不同的是,STRUCK的分类器目标(标签预测)与跟踪器的目标(准确估计对象位置)紧密耦合。这种耦合确保了跟踪算法的优化目标与实际的跟踪性能一致。
STRUCK利用核方法扩展了结构化输出预测,允许在输出空间中表达跟踪器的需求。这意味着算法可以处理非线性关系和复杂的数据模式,从而提高跟踪的鲁棒性和准确性。在实践中,这可能涉及到对图像特征的高级表示,如颜色、纹理、形状或运动信息,通过核函数将这些低级特征转换为高维空间的表示,以增强区分能力。
此外,STRUCK的结构化输出框架也允许考虑目标的上下文信息,例如相邻像素的关系或者目标与背景的相对位置,这对于处理遮挡、形变等挑战性情况至关重要。这种方法的另一个优点是其灵活性,可以适应各种不同的应用场景,包括视频监控、自动驾驶和机器人导航等。
STRUCK是一种创新的视觉目标跟踪算法,通过结构化输出和在线SVM,实现了更加精确和适应性强的跟踪性能,解决了传统分类方法在目标跟踪中的局限性。这种方法不仅简化了跟踪流程,还提高了算法的效率和准确性,对于计算机视觉领域的目标跟踪研究具有重要意义。"
Struck: Structured Output Tracking with Kernels
Sam Hare
1
Amir Saffari
1,2
Philip H. S. Torr
1
1
Oxford Brookes University, Oxford, UK
2
Sony Computer Entertainment Europe, London, UK
{sam.hare,philiptorr}@brookes.ac.uk amir@ymer.org
Abstract
Adaptive tracking-by-detection methods are widely used
in computer vision for tracking arbitrary objects. Current
approaches treat the tracking problem as a classification
task and use online learning techniques to update the ob-
ject model. However, for these updates to happen one needs
to convert the estimated object position into a set of la-
belled training examples, and it is not clear how best to
perform this intermediate step. Furthermore, the objective
for the classifier (label prediction) is not explicitly coupled
to the objective for the tracker (accurate estimation of ob-
ject position). In this paper, we present a framework for
adaptive visual object tracking based on structured output
prediction. By explicitly allowing the output space to ex-
press the needs of the tracker, we are able to avoid the
need for an intermediate classification step. Our method
uses a kernelized structured output support vector machine
(SVM), which is learned online to provide adaptive track-
ing. To allow for real-time application, we introduce a bud-
geting mechanism which prevents the unbounded growth in
the number of support vectors which would otherwise oc-
cur during tracking. Experimentally, we show that our al-
gorithm is able to outperform state-of-the-art trackers on
various benchmark videos. Additionally, we show that we
can easily incorporate additional features and kernels into
our framework, which results in increased performance.
1. Introduction
Visual object tracking is one of the core problems of
computer vision, with wide-ranging applications including
human-computer interaction, surveillance and augmented
reality, to name just a few. For other areas of computer vi-
sion which aim to perform higher-level tasks such as scene
understanding and action recognition, object tracking pro-
vides an essential component.
For some applications, the object to be tracked is known
in advance, and it is possible to incorporate prior knowledge
when designing the tracker. There are other cases, however,
where it is desirable to be able to track arbitrary objects,
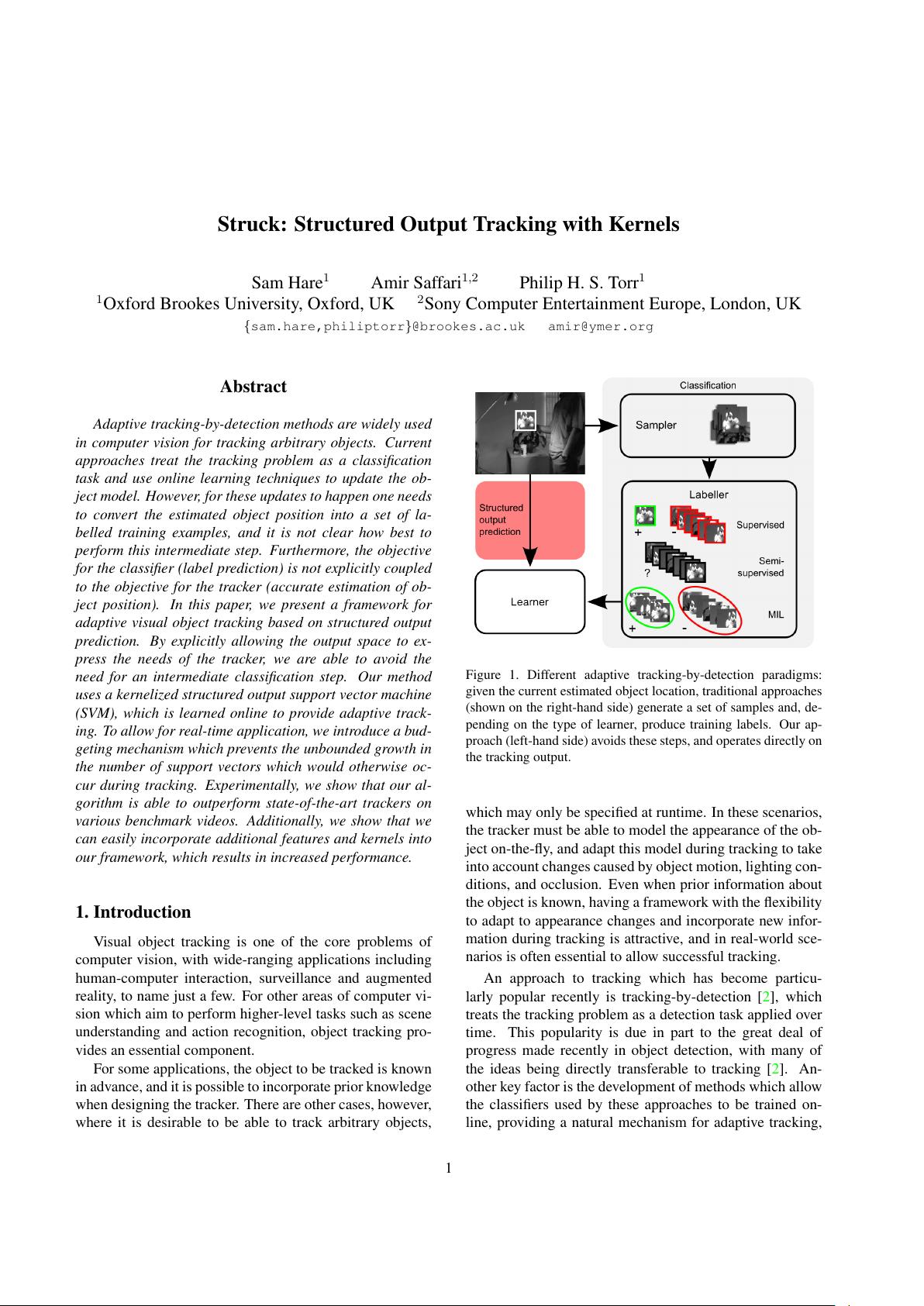
Figure 1. Different adaptive tracking-by-detection paradigms:
given the current estimated object location, traditional approaches
(shown on the right-hand side) generate a set of samples and, de-
pending on the type of learner, produce training labels. Our ap-
proach (left-hand side) avoids these steps, and operates directly on
the tracking output.
which may only be specified at runtime. In these scenarios,
the tracker must be able to model the appearance of the ob-
ject on-the-fly, and adapt this model during tracking to take
into account changes caused by object motion, lighting con-
ditions, and occlusion. Even when prior information about
the object is known, having a framework with the flexibility
to adapt to appearance changes and incorporate new infor-
mation during tracking is attractive, and in real-world sce-
narios is often essential to allow successful tracking.
An approach to tracking which has become particu-
larly popular recently is tracking-by-detection [2], which
treats the tracking problem as a detection task applied over
time. This popularity is due in part to the great deal of
progress made recently in object detection, with many of
the ideas being directly transferable to tracking [2]. An-
other key factor is the development of methods which allow
the classifiers used by these approaches to be trained on-
line, providing a natural mechanism for adaptive tracking,
1
2011 IEEE International Conference on Computer Vision
978-1-4577-1102-2/11/$26.00
c
2011 IEEE
263
下载后可阅读完整内容,剩余7页未读,立即下载
2015-05-12 上传
2019-08-07 上传
2021-09-28 上传
2023-02-23 上传
2015-05-21 上传

ballball吴晗
- 粉丝: 19
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
