MC33886电机驱动电路对比分析:正反转控制与效率优化
需积分: 17 118 浏览量
更新于2024-09-17
收藏 252KB DOC 举报
"本文介绍了Freescale智能车大赛中使用的电机驱动芯片MC33886在不同驱动电路下的应用和比较,重点讨论了电机速度控制的原理和MC33886的不同工作模式。"
MC33886是一款常用的电机驱动芯片,尤其在智能车竞赛中广泛应用。它的核心功能是通过控制输入信号D1、/D2、IN1和IN2来调整电机的正反转和速度。芯片的真值表显示了四种不同的输入状态与对应的输出状态,这使得通过改变PWM波的占空比可以精确控制电机的速度。例如,通过向IN1和IN2口送入PWM波,可以实现电机的正转和反转。当需要电机加速时,可以发送高占空比的PWM波,反之,低占空比的PWM波会使电机减速。
在无倍频情况下,MC33886输出的PWM频率为5kHz,这意味着每秒钟有2400个周期(PWMPERXY=2400)。此外,该芯片内置了一个错误报告管/FS,可以连接到单片机的PT2口,用于捕获任何异常情况,确保系统的稳定运行。
文中提到了两种不同的电路接法。第一种是单片MC33886驱动电路,用于实现电机的正反转。这种接法中,电机速度控制采用RS-380SH型直流电机,配合E40S-600-3-3型旋转编码器进行闭环控制。当使用半桥驱动时,电机的减速主要依赖于自由停车,响应时间较长。而全桥驱动则能提供更快的制动响应,更适用于需要快速响应的场合。
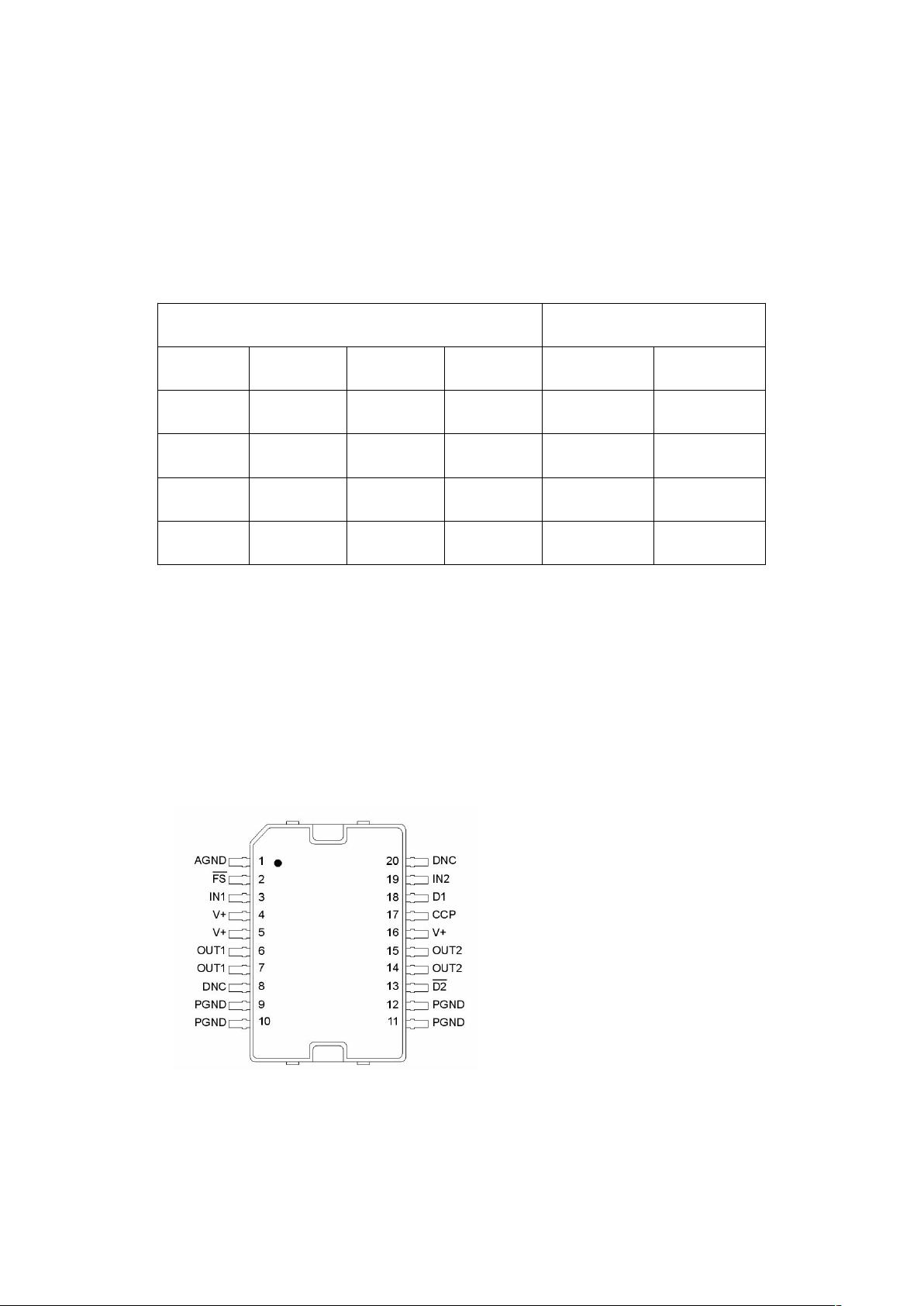
第二种接法是采用双片MC33886,这样可以实现更精细的转速控制。直流电机驱动电路的设计通常涉及到电源电压、PWM信号输入端口以及电机两端的输出端口。VCC电源电压为7.2V,IN1和IN2接收PWM信号,OUT1和OUT2驱动电机。D1和D2作为使能端,控制芯片的工作状态。
通过对比,我们可以看到,MC33886在全桥驱动模式下能够提供更快的制动响应,对于智能车在直道进入弯道时需要的急速降速有着显著的优势。而在具体应用中,设计者可以根据系统需求和性能指标选择适合的驱动电路配置,以优化电机控制效果。
电机速度控制的不同接法
速度控制原理(包括正反转):
通过改变电机驱动芯片 MC33886 所输入的 PWM 波的占空比,来控制对
电机的供电电压的大小,从而控制电机的转动速率。
MC33886 芯片的真值表如下:
输入 输出
D1 /D2 IN1 IN2 OUT1 OUT2
0 1 1 0 1 0
0 1 0 1 0 1
0 1 0 0 0 0
0 1 1 1 1 1
在设计过程中通过了向 IN1,IN2 口送出 PWM 波来控制电机的正转和反转,使
用了电机的正转为智能车加速,当转弯的时候利用了反转 PWM 波来控制电机
的减速,在无倍频的情况下,输出方波为 5kHz,。
PWMPERXY= 2400;
MC33886 芯片内含错误报告管/FS,,通过将其接到单片机 PT2 口来进
行错误捕捉。
通过 PWM5,PWM7 的开启,送数和关断,向 IN1 和 IN2 送 PWM 波,自
动控制电机的正反转,通过反转来刹车。
接法一:单片 MC33886-正反转
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
551 浏览量
123 浏览量
326 浏览量
286 浏览量
551 浏览量
405 浏览量
134 浏览量

napoleongjc
- 粉丝: 1
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







