基于STC12C5A60S2单片机的两轮自平衡车姿态控制与PID设计
版权申诉
11 浏览量
更新于2024-06-24
收藏 745KB DOCX 举报
本文主要探讨了基于单片机的两轮自平衡车控制系统的设计。两轮自平衡车作为一种复杂的动态系统,其稳定性依赖于精确的感知和高效的控制策略。该设计的核心目标是实现车辆的姿态控制,确保其在无干预时能保持平衡,即使在受到外部干扰时也能快速恢复。
首先,设计的关键组件是重力加速度陀螺仪传感器MPU-6050,它用于实时监测车辆的倾斜角度和运动状态。陀螺仪提供了角速度信息,而加速度计则提供了车辆加速度数据。这些原始数据可能存在噪声和漂移,因此采用了互补滤波技术进行数据融合,提高姿态估计的精度和鲁棒性。
选择STC公司的8位单片机STC12C5A60S2作为主控制器,这是一款高效、低功耗的处理器,能够处理传感器输入并执行复杂的控制算法。PID(比例积分微分)控制算法在此发挥了关键作用,通过连续计算和调整控制信号,补偿车辆的不平衡,使得电机驱动芯片TB6612FNG能够准确地控制两个电机的转速,从而维持车辆的动态平衡。
设计中还包含了蓝牙通信功能,用户可以通过智能手机或其他蓝牙设备远程操控小车,实现前进、后退以及左右转向等动作。这不仅增强了系统的实用性和便利性,也展示了现代智能硬件与无线通信技术的结合。
此外,设计过程不仅要考虑硬件选型和算法优化,还需关注电源管理、散热设计以及机械结构的稳健性,以确保整个系统的可靠性和长期运行。通过实验验证,该控制系统在实际应用中的表现证明了其在复杂环境中的稳定性和响应速度,为两轮自平衡车的自主控制技术提供了一个实用的解决方案。
总结来说,本文详细介绍了两轮自平衡车控制系统的设计思路、关键技术(如陀螺仪、加速度计、PID控制和蓝牙通信),以及整个系统的集成与测试。这种设计不仅推动了小型移动机器人技术的发展,也为未来智能交通工具的自主控制提供了新的研究方向。
制>速度控制>转向控制。由于小车同时受到三种控制的影响,从平衡控制角度来
看,其他两个控制就成为了它的干扰。因此对小车速度、方向的控制应该尽量保
持平滑,以减少对平衡控制的干扰。
上述三种控制各自独立进行,它们各自假设其他两个控制都已经达到稳定。
比如控制小车加速和减速的时候,平衡控制一直在起作用,它会自动改变小车的
倾角,使小车实现加速和减速。
3.2 控制原理
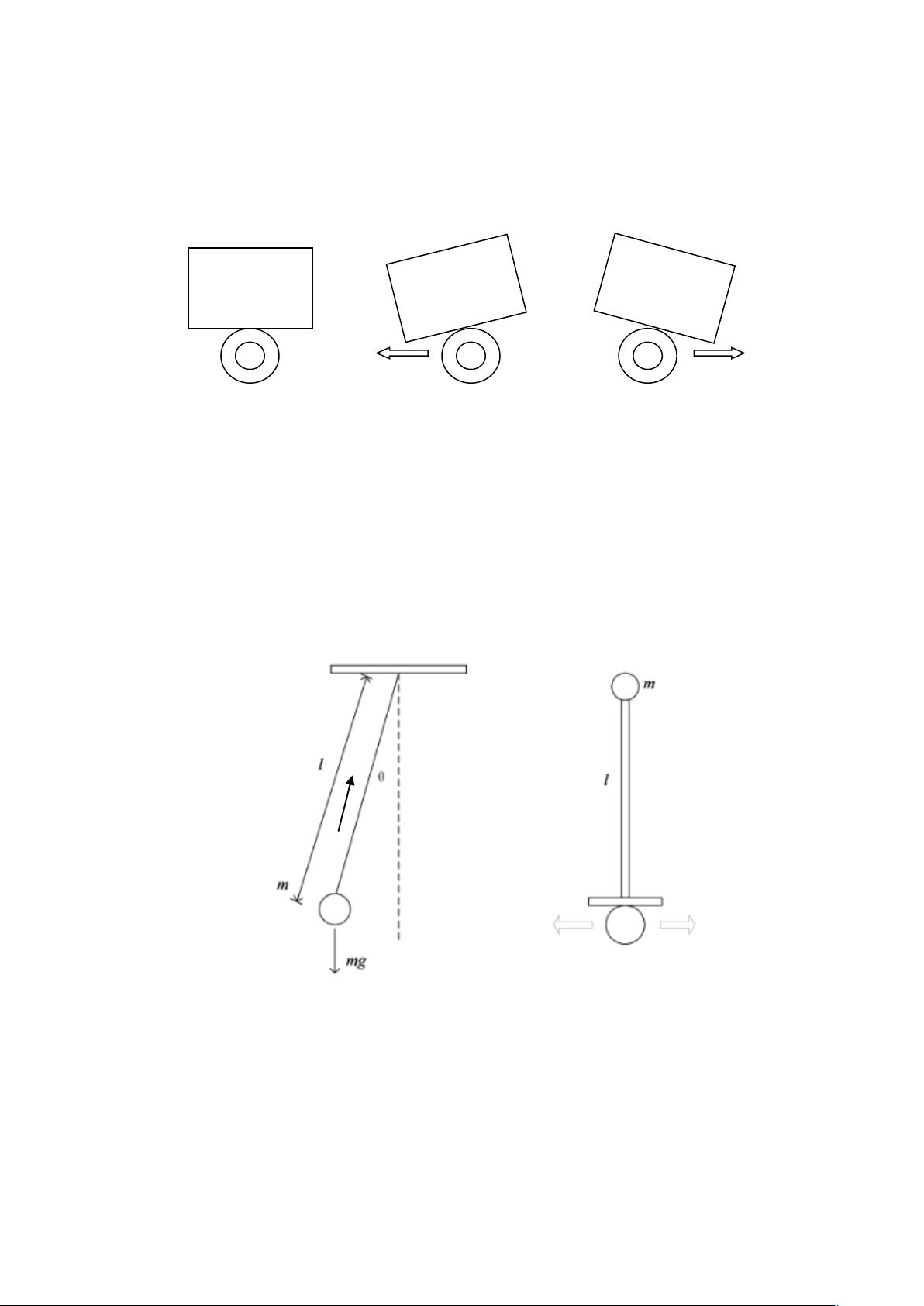
生活中有很多直立控制的例子,例如一个正常人可以经过简单的练习,让一
根直木棒在水平的掌心中保持直立。这需要两个条件:一是托着木棒的手掌可以
移动;二是眼睛可以观察到木棒的倾斜角和倾斜趋势(角加速度)。可以通过手
掌的移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。这两个条件缺一不
可,这就是控制中的负反馈机制。
小车的直立也是通过负反馈实现的,但相对于上面的例子来说相对简单,因
为小车有两个车轮着地,因此车体只会在一个平面内发生倾斜。控制车轮转动便
可抵消倾斜的趋势从而保持车体直立。
大脑
手掌
木棒
眼睛
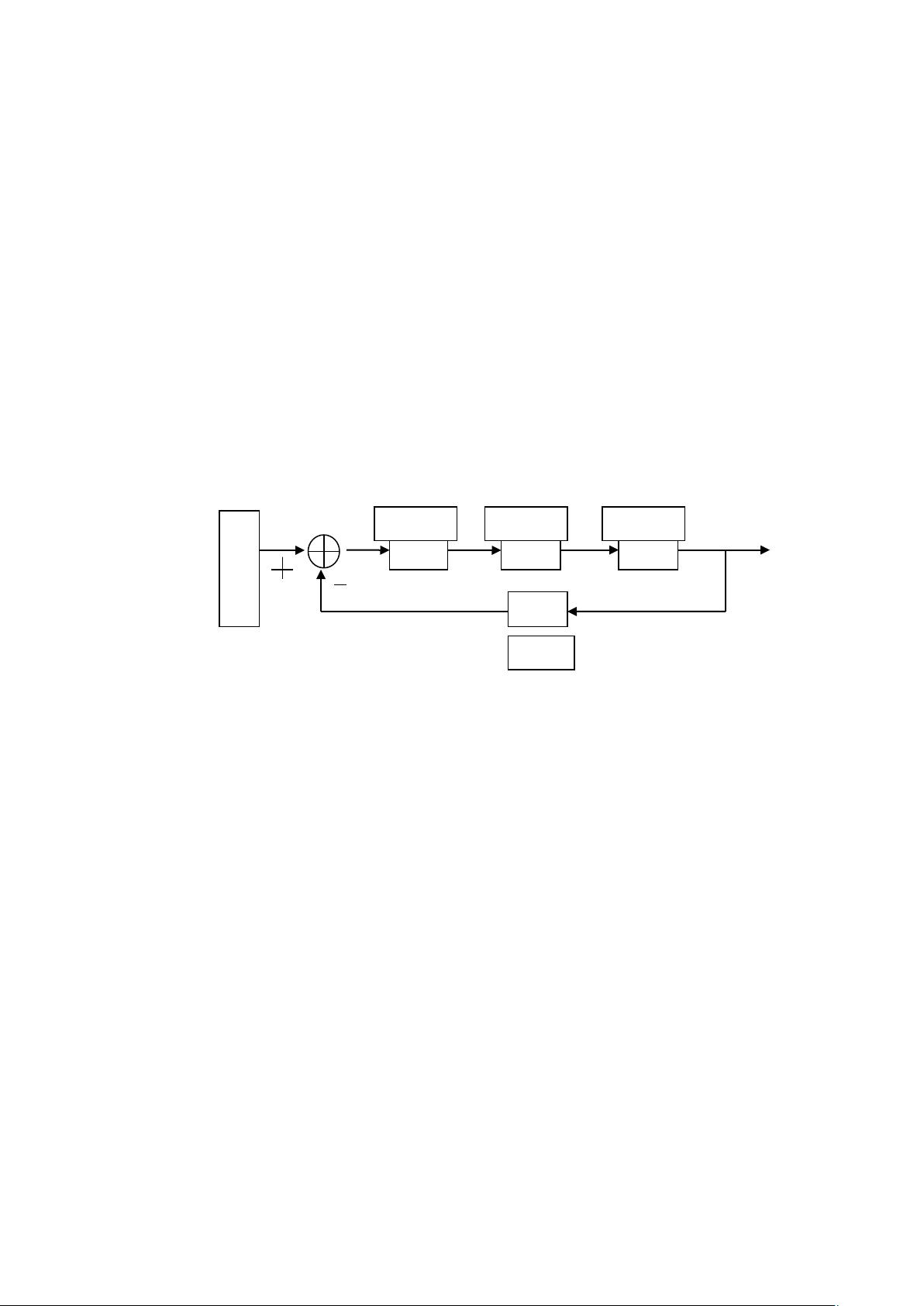
控
制
给
定
控制算法
执行机构
控制对象
传感器
图 3.1 保持木棍直立的反馈控制系统
剩余42页未读,继续阅读
2023-07-01 上传
2023-09-07 上传
2022-06-30 上传
2022-07-03 上传
2023-08-29 上传
2022-07-16 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
