天宝R8-RTK与VRS测量技术详解
版权申诉
75 浏览量
更新于2024-06-27
收藏 2.15MB DOCX 举报
该文档是关于天宝R8-RTK及VRS测量技术的简明教程,主要涵盖了RTK定位技术的原理及其在Trimble R8 RTK测量中的应用,以及VRS(Virtual Reference Station)技术的工作机制。
RTK(实时动态差分法)是一种高精度的全球定位系统(GPS)定位技术。它通过实时处理两个或多个GPS接收器(基准站和流动站)之间的相位观测值差异,实现厘米级的定位精度。在RTK模式下,基准站通过数据链将观测值和自身坐标信息传输给流动站,流动站则同时接收基准站数据和自身观测数据,实时计算出精确的地理位置。
VRS(虚拟参考站)技术是天宝公司提出的一种网络RTK解决方案。VRS技术利用分布在特定区域内的多个基准站,将它们的数据集中处理,为用户提供一个虚拟参考站的数据,这个虚拟站的位置基于用户实际位置附近的几个基准站计算得出,从而提高了定位的精度和稳定性。通过这种方式,用户可以在较远距离上获取类似于近距离直接连接基准站的高精度定位效果。
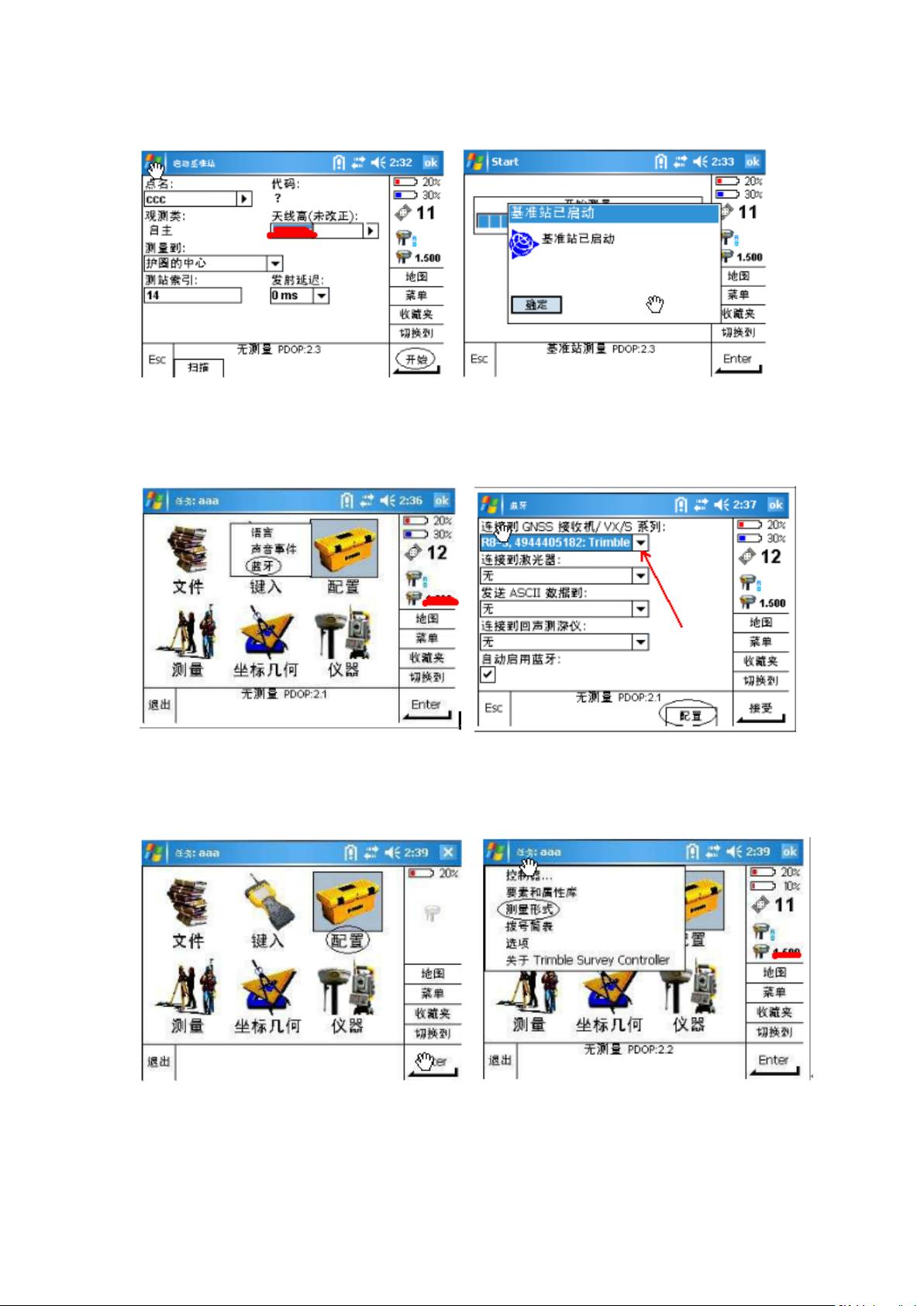
Trimble R8 RTK的使用步骤包括新建或打开任务、配置基准站和流动站。新建任务时需设置任务名称和坐标系统,通常选择“无投影/无基准”,并进行点校正。配置设备时,需要通过蓝牙连接手簿与电台或手机等设备。连接基准站后,可以在控制器的蓝牙设置中选择对应的电台,等待连接成功后,系统会显示电台的相关信息。
在配置流动站时,除了连接基准站,还需要确保流动站能够接收到必要的卫星信号,并维持足够的信号强度以保持稳定的数据链路。流动站会在接收到基准站的改正数据后,实时计算自身的精确位置。
该教程提供了天宝R8-RTK系统的操作指南,以及VRS技术的简单介绍,对于理解和应用高精度GPS定位技术具有指导意义。无论是初次接触RTK测量的用户,还是希望优化现有工作流程的专业人士,都能从中受益。通过遵循这些步骤,用户可以有效地进行厘米级精度的地形测量、土方计算、道路设计等专业应用。

→启动基准站接收机→点名(两种形式以控制点或者非控制点),非
控制点选择键入→此处。控制点选择列表→控制点名。
剩余36页未读,继续阅读
334 浏览量
114 浏览量
121 浏览量
2021-09-07 上传
2021-09-08 上传
2021-09-07 上传
2021-09-08 上传
2021-09-08 上传

猫一样的女子245
- 粉丝: 231
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- HUMmer-开源
- README-Generator
- 自定义基于接口,实体类注解脱敏
- XYCMS留言板 v7.4
- flutter-rechargeApp-md5-674a298f5659de080bb22ea002de4fbf
- RRT轨迹规划算法matlab程序
- calculator
- 在Rust中从头开始克隆SQLite-Rust开发
- Tnotes_app:任务和笔记Flutter应用
- 计算机辅助几何设计与非均匀有理B样条 修订版 实例 教程 软件
- 基于JAVASwing的贪食蛇小游戏 键盘事件监听 多线程 文件IO 自取
- js-programming-assignment-1-APozin558:教室为GitHub创建的js-programming-assignment-1-APozin558
- Download Accelerator Plus v10.0.0.6 Alpha
- PDS-Movie-Competition
- SilexStarter-GanttModule
- ta-技术分析库。 实施指标数量:EMA,SMA,RSI,MACD,随机指标等-Rust开发
