四轮差速双驱双向AGV机器人运动学建模与仿真分析
"双驱双向AGV机器人运动学分析及仿真"
本文主要探讨了双驱双向AGV(Automatic Guided Vehicle)机器人的运动学分析及其仿真技术。双驱双向AGV机器人采用两个驱动模块,这种配置使得机器人具有更高的灵活性和操控性。在分析过程中,研究人员利用四轮差速原理来构建AGV在转弯过程中的运动学模型。
首先,建立运动学模型是理解AGV行为的关键。四轮差速允许每个轮子独立控制,从而在转弯时提供更精确的机动性。通过这种方式,AGV能够在保持稳定的同时进行平滑的曲线行驶,适应各种路径规划需求。模型的构建考虑了车辆的速度、转向角以及各个轮子的转速等参数,旨在模拟实际行驶中的动态特性。
接着,采用ADAMS(Adaptive Dynamic Modeling and Simulation)仿真软件对AGV机器人的运动学行为进行模拟。ADAMS是一种强大的多体动力学仿真工具,能够准确预测机械设备的运动和动力学性能。通过在该软件中设定AGV的动力学参数和环境条件,可以观察和分析机器人的运动轨迹、速度分布和稳定性等关键指标。
同时,为了进一步验证模型的准确性,研究者使用MATLAB软件进行了数值分析。MATLAB以其强大的数值计算和数据可视化能力,对AGV的运动学模型进行了深入计算,比较了理论计算结果与仿真结果的差异。这种对比分析有助于确认模型的精度,为后续的机器人结构优化、轨迹规划和控制系统设计提供了可靠依据。
此外,文章指出,双驱双向AGV机器人在自动化物流系统中扮演着重要角色,因为它们可以实现高效率、低成本和灵活的无人化生产。随着技术的进步,AGV的应用领域不断扩大,不仅局限于工业场景,还在农业、国防、医疗等领域有广泛的应用潜力,特别是在危险和恶劣环境下,如搜索、救援、辐射处理和太空探索等任务中,AGV能发挥重要作用。
本文的研究对象是一款四轮差速驱动、磁条导引、潜伏牵引式的双驱双向AGV机器人。相较于传统的两轮驱动AGV,四轮驱动的AGV在运动学研究上相对较少,但其复杂性和挑战性更大。通过对四轮驱动AGV的深入研究,有助于提升其转弯性能,优化设计,从而提高整个系统的性能和可靠性。
【42】 第38卷 第3期 2016-03
双驱双向AGV机器人运动学分析及仿真
Kinematics analysis and simulation of double-drive and double-direction AGV robot
王殿君
1
,
关似玉
1
,
陈 亚
1
,
彭文祥
1
,
王超星
2
WANG Dian-jun
1
, GUAN Si-yu
1
, CHEN Ya
1
, PENG Wen-xiang
1
, WANG Chao-xing
2
(
1.北京石油化工学院 机械工程学院
,
北京 102617
;
2.北京化工大学 机械工程学院
,
北京 100029
)
摘 要:
针对双驱双向AGV机器人采用两个驱动模块的构型特点,利用四轮差速原理建立AGV机器
人在转弯过程的运动学模型,运用ADAMS仿真软件对AGV机器人进行运动学仿真,并利用
MATLAB软件对AGV机器人运动学模型进行数值分析,通过对比机器人理论计算和仿真结果
的偏差,验证了运动学理论分析的正确性,为继续优化机器人结构设计、轨迹规划以及控制
系统设计奠定了基础。
关键词:
双驱双向AGV机器人;运动学模型;虚拟样机
中图分类号:
TP242.2
文献标识码
:A
文章编号:
1009-0134(2016)03-0042-05
收稿日期:2015-10-08
基金项目:
北京石油化工学院URT项目
(
2014J00087
)
作者简介:
王殿君
(
1973
-
),
男
,
教授
,
博士
,
研究方向为机器人技术
。
0 引言
自动导引车(Automated Guided Vehicle,简称
AGV)是智能搬运机器人的种,它主要依靠电磁、
激光或磁条等导引装置,无需操作人员驾驶就能沿预定
轨迹或导引路径行进,实现物料的智能搬运
[1~3]
。在自
动化物流系统中,最能充分地体现AGV的自动化和柔
性,实现高效、经济、灵活的无人化生产。同时,随着
AGV性能的不断完善,其应用范围大为扩展,不仅将在
工业、农业、国防、医疗、服务等行业中得到广泛的应
用,而且将在搜索、救援、辐射和空间领域等有害与危
险场合得到很好的应用。
本文研究的是款四轮差速驱动、磁条导引、潜伏
牵引式的双驱双向AGV机器人。以往的很多研究已经建
立了两轮驱动AGV机器人的运动学模型,但对于四轮驱
动AGV机器人的运动学研究还很少
[4,5]
。四轮驱动AGV
机器人的转弯是个十分复杂的运动学过程,它与机器
人的的结构设计、路径规划、控制系统设计等有着密切
的联系。本文运用车轮差速原理重点研究双驱双向AGV
转弯过程的运动学模型,并求得AGV最小转弯半径,采
用ADAMS软件仿真AGV的转弯过程,对运动学模型进
行理论计算,对比理论值和仿真值,验证运动学理论分
析的正确性。
1 双驱双向AGV机器人运动学模型的构建
1.1 三维模型的建立
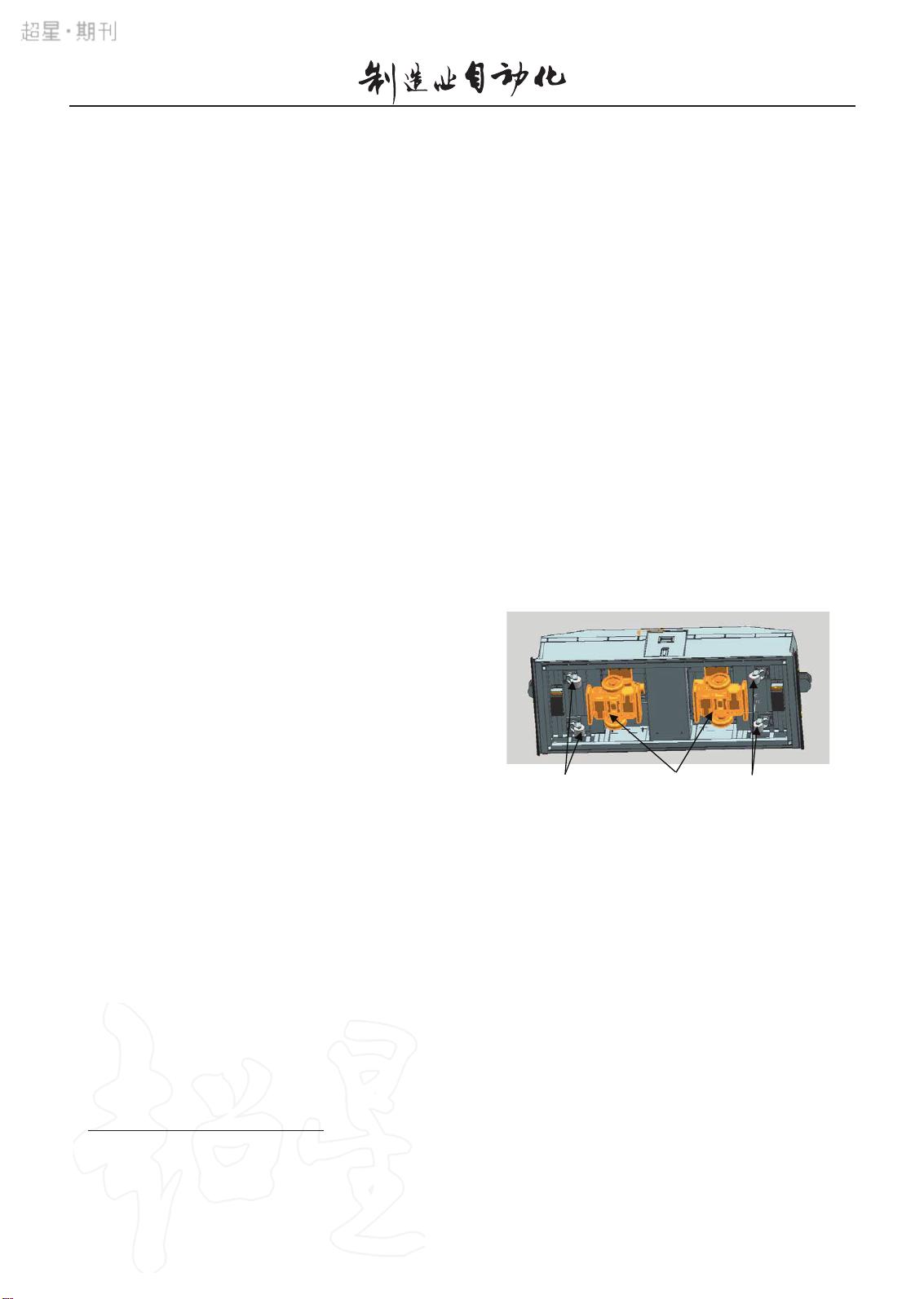
双驱双向AGV机器人的机械本体是由车体、驱动
模块、牵引模块以及辅助运动模块等组成。采用UG软
件建立了AGV的维模型如图1所示。AGV的行走机构
由四个向轮、两个驱动模块组成,按中心对称布置,
每个驱动模块包括两个驱动轮。机器人的直线和转弯行
走主要通过驱动模块来实现,AGV机器人可以按照预设
的轨迹路线进行作业,实现在不同复杂工况下的预设搬
运任务。
轮
动 轮
图1 双驱双向AGV机器人三维模型
1.2 运动学模型的建立
在对双驱双向AGV机器人进行运动学建模之前,
先作如下假设:
1)AGV由刚性构架组成;
2)运动平面平整光滑,且只作无滑移纯滚动运动;
3)车轮与地面摩擦小到不足以影响车轮沿自身旋
转轴线转动。
双驱双向AGV的结构简图如图2所示,其中A和B为
第个驱动模块左右轮,C和D为第二个驱动模块左右
轮,两个驱动模块间距为S,两个驱动轮间距为L,驱动
轮半径为r。这里S=650mm,L=237mm,r=75mm。设A
ChaoXing
下载后可阅读完整内容,剩余5页未读,立即下载
2020-05-27 上传
2020-02-15 上传
2023-09-12 上传
2023-09-12 上传
2023-07-10 上传
2023-05-14 上传
2023-08-05 上传
2023-06-06 上传

nandi_1
- 粉丝: 27
- 资源: 26
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
