微电网协同控制:电动汽车与风力发电的随机模型预测方法
PDF格式 | 1.54MB |
更新于2024-07-14
| 20 浏览量 | 举报
"微电网中插电式电动汽车和风力发电机的随机协调:模型预测控制方法"
在当前的可再生能源和智能电网领域,微电网作为分布式能源的重要组成部分,日益受到关注。微电网能够集成多种分布式能源资源(DERs),如插电式电动汽车(PEVs)和风力发电机,以提高供电稳定性和效率。这篇研究论文探讨了如何通过一种层次化的随机协调策略,利用模型预测控制(Model Predictive Control, MPC)方法,有效地整合PEVs和风力发电机的输出,以实现微电网的供需平衡。
文章首先介绍了问题的背景和重要性,即如何利用PEVs的灵活性和风能的可再生性,实现二者的协同工作,以优化微电网的运行。论文提出的控制方案分为两个层次:上层的随机预测控制器和下层的PEV及风力发电机控制器。
上层的随机预测控制器基于非高斯风力功率预测分布,对PEV聚合器和风力发电机进行协调操作。由于风力发电的不稳定性,使用非高斯分布可以更准确地反映实际风况的不确定性。控制器的目标是计算出PEV充电和风力发电的功率参考值,以确保微电网的供需平衡。
下层的PEV控制器负责将聚合后的充电功率优化分配给个体PEVs。这一过程通常涉及充电时间窗口的优化,以最小化对电网的影响同时满足车辆用户的充电需求。而风力控制器则调节风力发电机的功率输出,以适应上层控制器给出的参考值,确保在风力波动时仍能维持稳定的电网输出。
论文的主要创新点在于它考虑了非高斯不确定性和部分可调度性,这是对传统模型预测控制的扩展,提高了微电网在面对不确定性和随机性的环境下的鲁棒性。通过这种方式,即使在风力变化大、PEV充电需求不固定的情况下,也能确保微电网的稳定运行和电力系统的经济性。
这篇研究论文提出了一种新的控制策略,旨在解决微电网中PEVs和风力发电机的随机性协调问题。通过模型预测控制,这种策略能够有效地应对可再生能源的不确定性,同时优化PEV的充电策略,从而在保证用户需求的同时,提高微电网的整体效率和可靠性。这项工作对于推动微电网技术的发展,尤其是在可再生能源并网和电动汽车大规模应用的背景下,具有重要的理论与实践意义。
KOU et al.: STOCHASTIC COORDINATION OF PEVs AND WIND TURBINES IN MICROGRID 1539
a desired trajectory. To address this, the proposed scheme uses
a target zone as the power reference for wind turbine, rather
than a traditional reference trajectory.
The remainder of this paper is organized as follows.
Section II presents the mathematical model of the microgrid,
PEV aggregator, and wind turbine. Section III gives the precise
control problem formulation and the detailed description of the
proposed control scheme. Section IV contains the description
of the simulations and the discussion of the results. Finally,
Section V draws the conclusions.
II. M
ODELING OF WIND-PEV MICROGRID
A. Microgrid Layout and Modeling
In this paper, we consider a microgrid with a DFIG wind tur-
bine and several PEVs, as well as general user demands (i.e.,
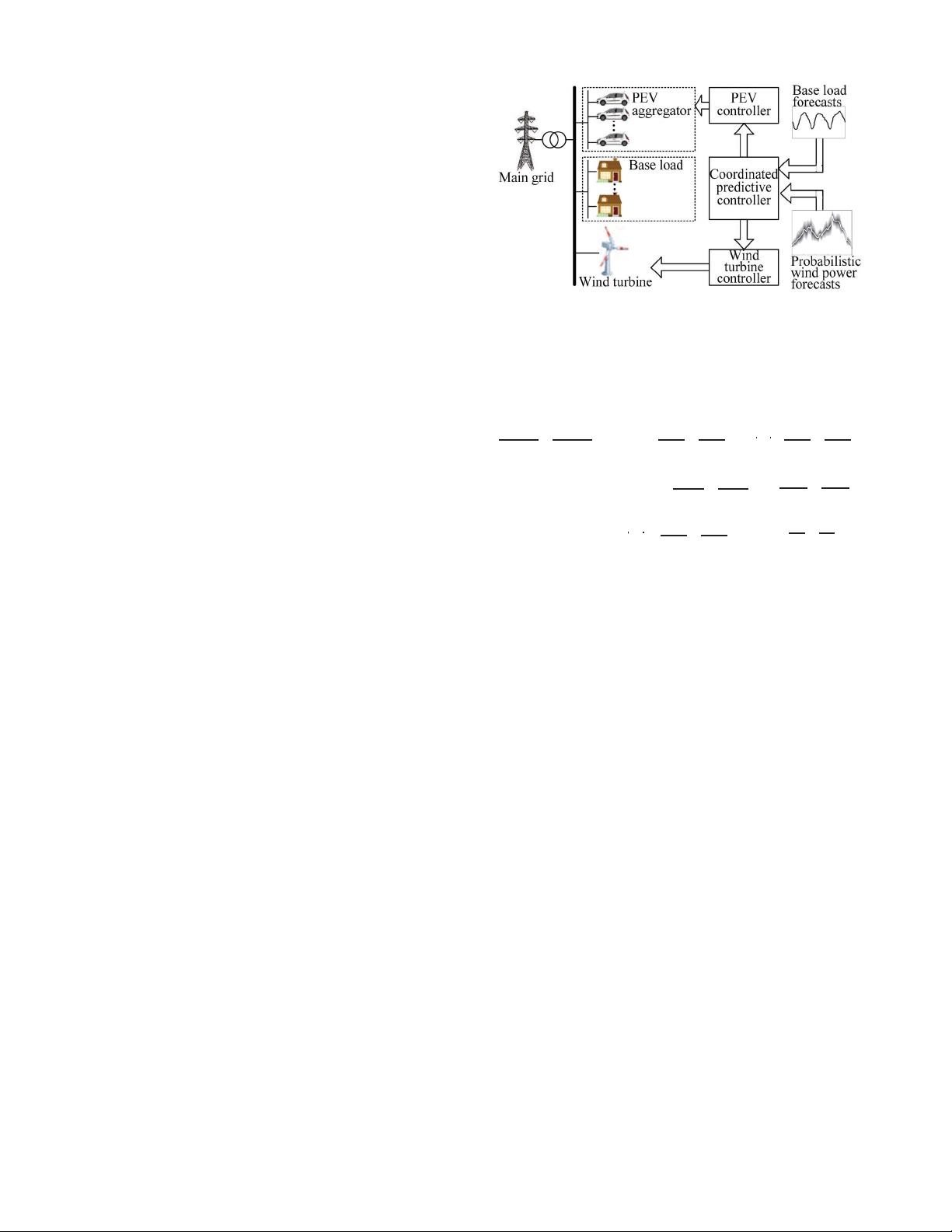
the baseline load profile without PEV loads). A schematic rep-
resentation of the considered microgrid is shown in Fig. 1.This
microgrid is connected to the main grid through a transmission
line. It is expected that the power exchange between the micro-
grid and main grid is minimized, i.e., the power generation
matches the demand in this microgrid.
Based on the layout shown in Fig. 1, an overall linear
dynamic model for the microgrid can be formulated as follows:
E
V ,agg
(k
M
+ 1) = E
V ,agg
(k
M
) + ηυP
V ,agg
(k
M
)
+ E
V ,arr
(k
M
) − E
V ,leav
(k
M
)
P
G
(k
M
) = P
W
(k
M
) − P
V ,agg
(k
M
) (1)
where k
M
is the index of time slot, each time slot is 15 min.
In this paper, we only consider the private PEVs, i.e.,
private-owned PEVs. The driving pattern of these PEVs is
relatively flexible and they are usually not in use for most
of the time in a day, especially during the night. Therefore,
these PEVs are suitable candidates of flexible energy storage
facilities, which can be used to absorb the surplus wind power
and improve the power balance during the off-peak times at
night [10]. For this reason, the time horizon of the proposed
control scheme is 6:00
P.M.to6:00A.M. Similar to the settings
in [15], in this paper, it is assumed that some private PEVs
will voluntarily be registered as dispatchable PEVs during the
night. To achieve this, associate payments can be made to
attract the owners to register their PEVs. Once registered, the
owners of PEVs should guarantee that their PEVs are plugged-
in during the night. In this way, the microgrid operator can
then use these dispatchable PEVs as flexible energy storage
facilities and dispatch them if necessary. Of course, even with
associate payments, during the night, some PEV owners may
still leave home and disconnect their PEVs from the V2G
discharging facility. In our setting, this scenario is regarded
as additional noise E
V ,leav
(k
M
), which will be discussed in
detail later.
In previous wind-PEV dispatching studies, the wind turbine
power output P
W
is normally regarded as a deterministic vari-
able, and hence, the uncertainties in wind power are neglected.
Nevertheless, as discussed in Section I, such uncertainties
significantly affect the control performance. To address this,
unlike previous works, we regard P
W
as a stochastic variable
Fig. 1. Schematic representation of the microgrid, together with the proposed
hierarchical control scheme.
in this paper. Consequently, the state space form of this linear
dynamic model can be expressed as
E
V ,agg
(k
M
+ 1)
x
M
(k
M
+1)
=
[
1
]
A
M
E
V ,agg
(k
M
)
x
M
(k
M
)
+
[
ηυ
]
b
M
P
V ,agg
(k
M
)
u
M
(k
M
)
+
[
1
]
b
M
E
V ,arr
(k
M
)
z
E
(k
M
)
−E
V ,leav
(k
M
)
z
N
(k
M
)
y
M
(k
M
) =
[
−1
]
c
M
P
V ,agg
(k
M
)
u
M
(k
M
)
+
[
1
]
c
M
P
W
(k
M
)
z
W
(k
M
)
. (2)
In model (2), P
V ,agg
is taken as the control input, P
W
and
E
V ,arr
are modeled as the additive stochastic disturbance z
W
and z
E
, respectively. The energy stored in leaving PEVs is
modeled as white Gaussian noise z
N
. The statistics of z
W
and z
E
will be discussed later.
B. PEV Aggregator Modeling
In the microgrid model (2), the PEV aggregator is modeled
by the stochastic variable E
V ,arr
(k
M
), i.e., the energy stored
in the PEVs that arrive home during the k
M
th time slot. This
variable is regarded as a disturbance to the system, so we
need to estimate its value in the controller design. To achieve
this, we derive an estimation model for E
V ,arr
(k
M
) in this
section. In this paper, the total number of PEVs is assumed
to be 300.
Specifically, E
V ,arr
(k
M
) is a function of the number of
PEVs that arrive home during the k
M
th time slot as well as the
initial energy in each PEVs battery at the time of plug-in. In
the following discussions, these two quantities are denoted by
N
V ,arr
(k
M
) and E
V ,arr,j
(k
M
), respectively. Considering the
stochastic nature of the PEV driving pattern, we derive statis-
tical models for these two quantities based on the data in [17].
These data are obtained from the real-world driving database
in Southeast Michigan.
Based on this driving behavior data, the statistical model
of N
V ,arr
(k
M
) can be obtained using the maximum like-
lihood estimation and curve-fitting techniques. Specifically,
we find that before 12:00
P.M., N
V ,arr
(k
M
) can be modeled
by truncated Gaussian distributions, as in Fig. 2. By 12:00
P.M., almost all PEVs arrive home. Moreover, as mentioned
before, we assume that the time horizon of the proposed con-
trol scheme starts at 6:00
P.M. Considering these facts, from
剩余14页未读,继续阅读
相关推荐





weixin_38514660
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
