库卡机器人初次通电与IO配置详尽指南
需积分: 12 123 浏览量
更新于2024-07-09
1
收藏 4.06MB PDF 举报
该文档是针对初次使用库卡机器人的集成商或终端用户的通电和IO配置指南。文档主要分为五个部分,旨在帮助用户在接收新机器人后进行正确的设备安装和设置。
1. 电气连接:文档详细介绍了控制柜与机器人之间的接口,包括X1接头,它是控制柜供电的入口。对于KRC4系列的控制柜,如KRC4stand、KRC4Midsize和KRC4Extend,提供的是三相四线制的380VAC交流电,功率分别为13.5kVA(前两者)和根据配置变化(后者的具体情况需联系库卡获取)。而KRC4Compact和KRC4Smallsize则使用欧洲标准的220VAC交流电,额定功率为2kVA,其中220VAC插头已经预先准备好了,可以直接接入。对于380VAC插头,用户需要自行连接,并确保漏电开关规格至少为300mA,电源线规格为1*4*6mm²,且建议使用单独的开关为机器人供电。
2. 初次上电:在完成电气连接后,用户需要按照文档指示进行初次上电操作,这一步骤对于确保机器人系统的正常运行至关重要。上电前要确认所有连接都牢固且符合安全要求。
3. 安全配置:安全是操作库卡机器人时的首要考虑因素,文档会提供关于安全防护措施、紧急停止按钮的位置以及操作流程的指导,以确保操作人员的人身安全。
4. 机器人零点校正:机器人零点校正是为了确保机器人位置精度,文档会介绍如何进行零点调整,这对于机器人的精确运动和任务执行至关重要。
5. IO配置:最后,文档将指导用户如何配置输入/输出接口,包括设置传感器、执行器和其他外围设备,以便与外部系统有效通信和控制机器人的动作。
整个文档结构清晰,适合初次接触库卡机器人的用户按照步骤进行操作,既确保了设备的正确安装,也强调了安全操作的重要性。通过遵循文档中的指导,用户能够顺利地进行机器人的初次启动和基本设置。

www.kuka-robotics.com
KUKA Roboter GmbH | 06.06.2010 | 第 6 页
以上为控制柜和机器人的示例接口,控制柜型号和机器人型号不一样,对应接口会略
有差别,但标签会是一样的,请留意。
对应接口的接线及说明如下:
1,X1接头:控制柜供电接口。
(1) KR C4 stand & KR C4 Midsize & KR C4 Extend:三相四线制,380V AC交流电;
① KR C4 stand & KR C4 Midsize额定功率: 13.5kVA
② KR C4 Extend额定功率:根据配置不同,功率不同,如有需要请联系库卡
(2) KR C4 Compact & KR C4 Smallsize:欧洲标准插头,220V AC交流电,额定功率2kVA;
其中,220V AC供电插头已接好,直接接入即可;
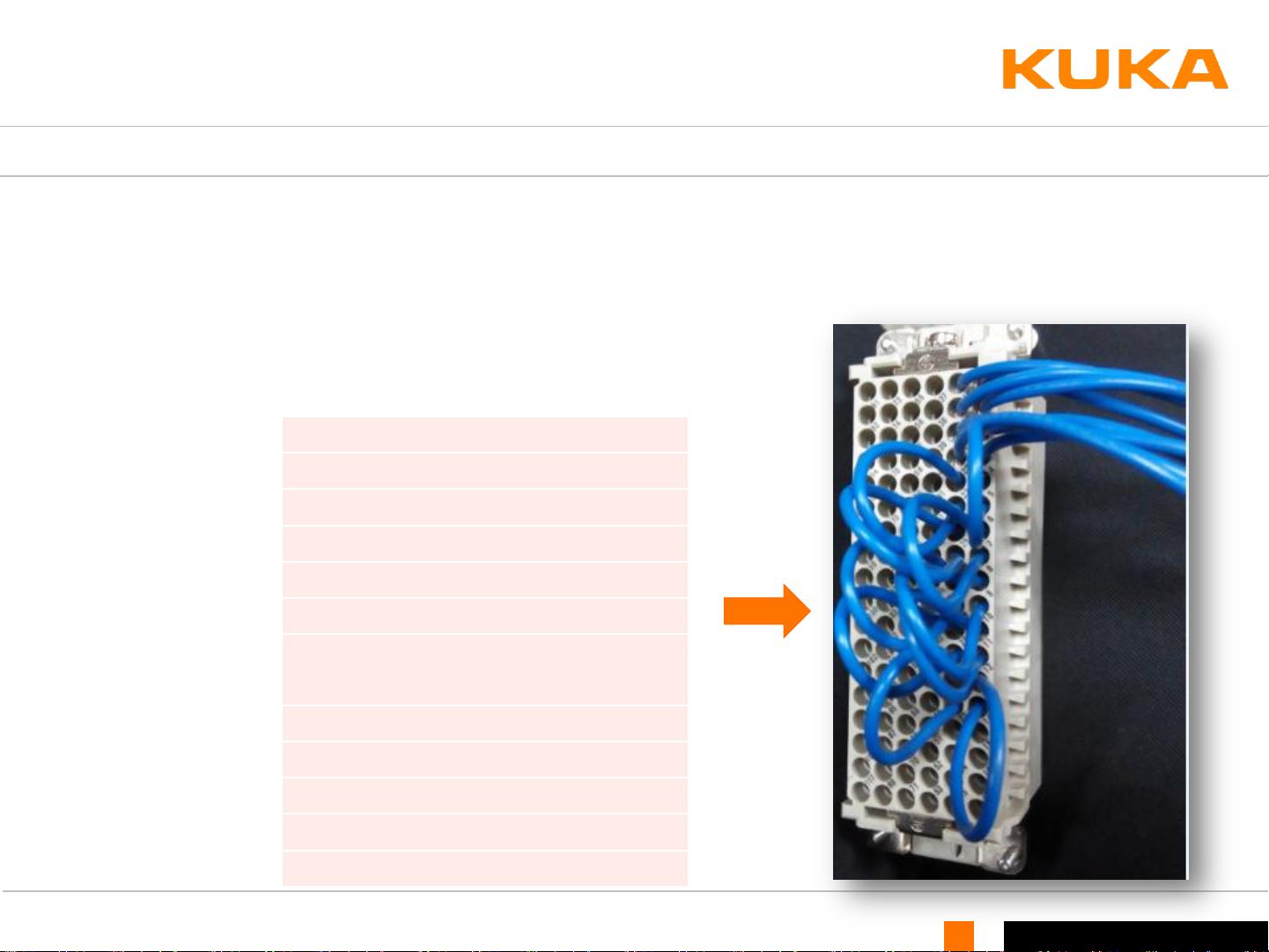
380V AC供电插头需用户接入,如下:
机器人初次通电——电气连接
剩余32页未读,继续阅读
2023-06-05 上传
点击了解资源详情
2019-08-06 上传
2020-08-04 上传
2020-09-09 上传
2021-09-29 上传

new0x
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
