仿生六足机器人:单片机控制的研究与设计
188 浏览量
更新于2024-06-24
收藏 1.51MB DOC 举报
"基于单片机控制的新型六足机器人学士学位论文"
这篇论文主要探讨了基于单片机控制的新型六足机器人的设计与实现。六足机器人因其仿生学设计,具备了传统轮式机器人无法比拟的移动性和地形适应能力。其研究目的旨在通过模拟生物的爬行机制,提高机器人的自动化水平和动态特性,同时利用其跨越障碍的能力,进行复杂环境的探索和应用。
1.1新型六足机器人研究目的和意义
六足机器人在移动灵活性、地形适应性方面表现出色,尤其适合跨越较大障碍。它们的足部自由度高,使得运动更加灵活,能应对不平整地面。作为研究工具,六足机器人可以帮助科学家深入理解昆虫的运动机制,为机械设计提供灵感。此外,这类机器人还可用于教学、娱乐、探险和搜救等领域,比如模拟昆虫行为、进入狭窄空间进行检查等。
1.2新型六足机器人研究概况及发展趋势
随着科技的进步,六足机器人的研究不断深入,涉及机械结构、控制系统、运动策略等多个方面。论文中的新型六足机器人采用了创新的机械结构设计,结合单片机控制,以实现更高效、精确的运动控制。其目标是实现直线行走与转向的无缝结合,控制转向角度、角速度、步距和速度,确保机器人行动的稳定性和灵活性。
2.机械结构与芯片简介
2.1机器人机械结构
机器人由多个关节和足部构成,模仿昆虫的腿部布局,以实现多方向和复杂角度的运动。
2.2机器人运动原理
运动原理基于生物的步态,通过控制各关节的伸缩来完成行走。
2.3驱动装置选择
论文可能讨论了选择合适的驱动电机或伺服系统,以驱动各个关节的运动。
2.4硬件结构介绍
硬件包括单片机、编码解码芯片和其他电子元件,形成整个系统的控制核心。
2.6单片机芯片介绍
可能使用了微控制器,如AVR或ARM系列,负责处理控制指令和传感器数据。
2.7编码解码芯片介绍
编码解码芯片用于处理输入输出信号,确保机器人运动的准确同步。
3.控制系统结构设计
3.1上位机控制
上位机通过编程语言(如C或Python)与单片机进行串口通信,实现远程控制。
3.1.1程序语言及串口通讯
通过串口通信协议,上位机发送指令给机器人,实现运动控制。
3.1.2人机交互界面
设计用户友好的图形界面,方便用户输入命令和监控机器人状态。
3.2基于无线的智能控制
使用无线发射和接收模块,实现无线遥控,增加机器人的操作范围和灵活性。
4.结论
论文可能总结了项目的技术成果,评估了机器人的性能,并提出了未来改进和研究的方向。
参考文献和致谢部分则列举了论文引用的学术资料和对帮助者的感谢。
这篇学士学位论文详细介绍了如何设计和实现一个基于单片机控制的新型六足机器人,涵盖了从机械结构设计到控制系统实现的全过程,是研究和教学中一个有价值的案例。
第 5 页共 32 页
2.3 驱动装置选择
本文设计的微型六足爬行机器人采用了三个个舵机分别对直线驱动器、转角驱动
器以及垂直驱动器来进行精确控制。舵机是一种位置伺服的驱动器
[5]
。它接收一定的
控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。舵
机定位精确、输出力矩较大、尺寸满足要求,作为本设计的力驱动部件十分理想。
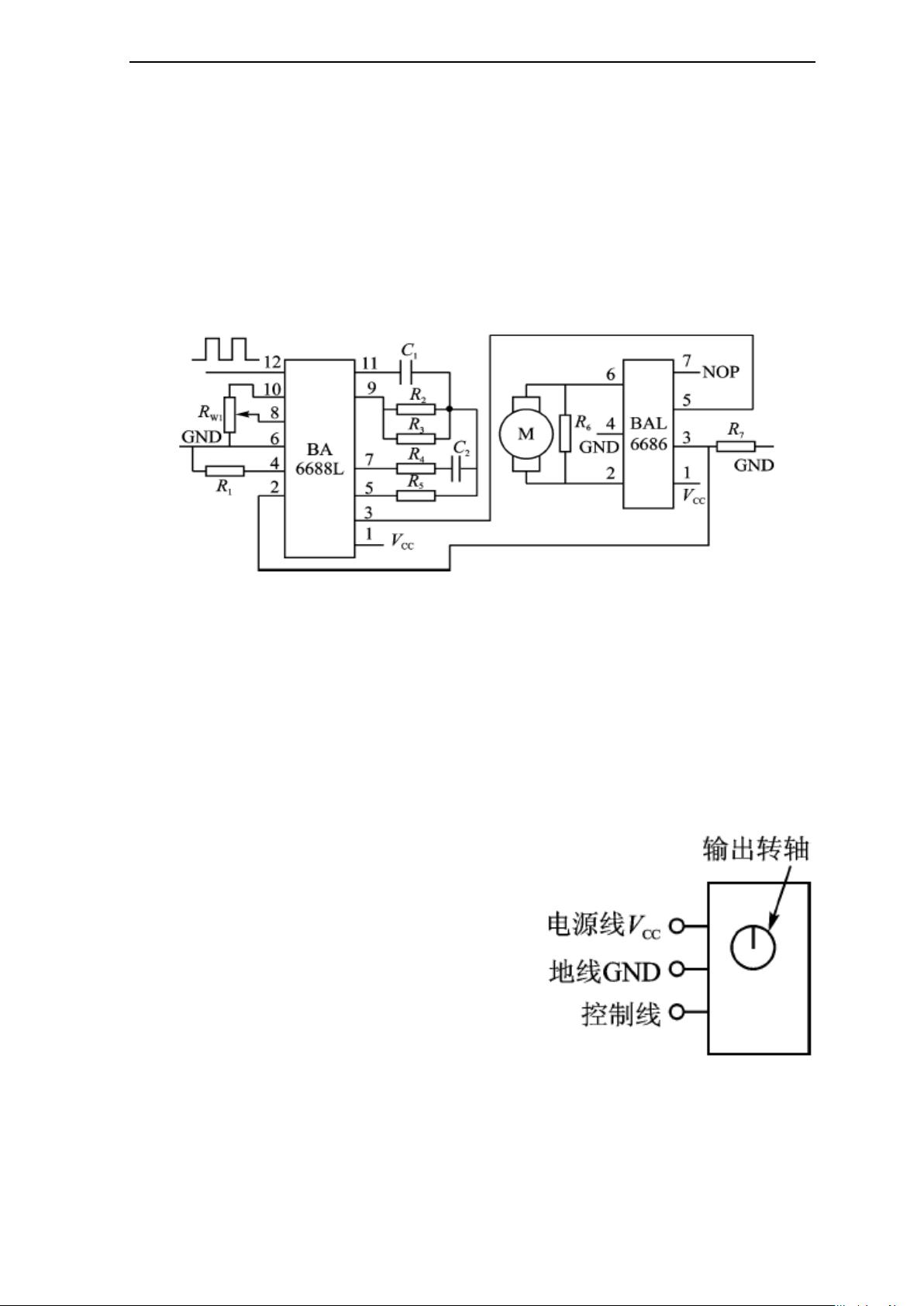
以日本FUTABA-S3003型舵机为例,图2.5是FUTABA-S3003 型舵机的内部电路。
图2.5 FUTABA-S3003 型舵机的内部电路
舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688L的12脚进行解
调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由
BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电
机转速一定时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为0,电机停止转
动.舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2.6所示。电源线
和地线用于提供舵机内部的直流电机和控制线路
所需的能源,电压通常介于4~6 V ,一般取5 V,
以便给舵机供电的电源应能提供足够的功率
[6]
。
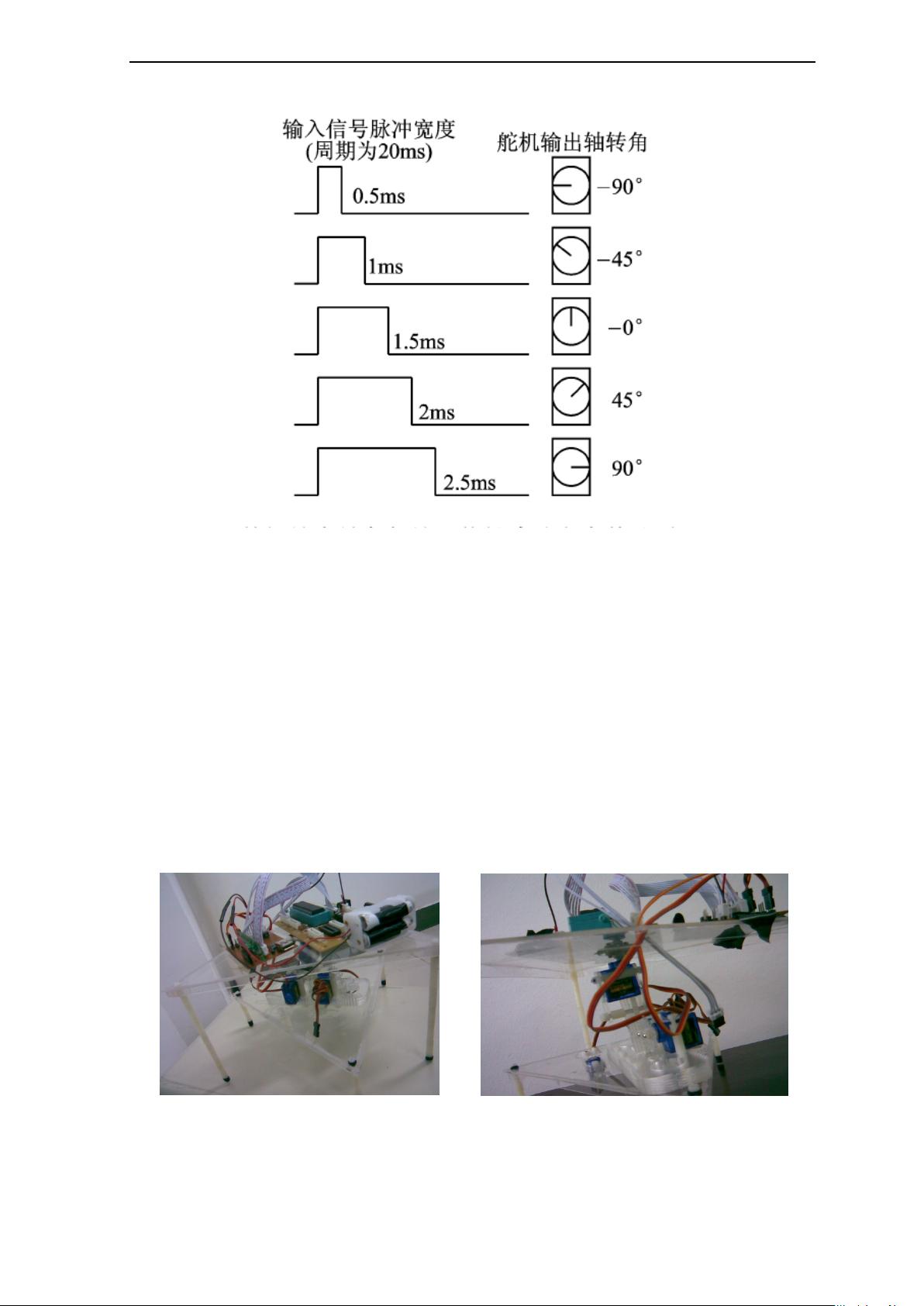
控制线的输入是一个宽度可调的周期性方波脉冲
信号,方波脉冲信号的周期为20ms (即频率为
50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发
生改变,角度变化与脉冲宽度的变化成正比。某型舵
机的输出轴转角与输入信号的脉冲宽度之间的关
系如图2.7所示。
图2.6 标准舵机示意图
剩余31页未读,继续阅读
2023-07-01 上传
2023-07-01 上传
2023-07-07 上传
2023-07-09 上传
2023-07-02 上传
2023-07-11 上传









