MT-OR机器人手册:从机械到电子系统解析
版权申诉
92 浏览量
更新于2024-07-05
收藏 3.41MB PDF 举报
"机器人说明书.pdf kexuexi"
本文档是关于MT-OR机器人的详细说明书,涵盖了从机械系统到电子系统,再到软件系统和开发指南的全方位介绍。MT-OR机器人是集成了多种先进技术的智能设备,适用于Robocup竞赛、学术研究以及教育领域。
在前言中,智能机器人被描绘成未来生活的重要组成部分,它们将拥有类似人类的智能和更强的劳动能力。MT-OR机器人旨在提供一个开放、模块化且稳定的平台,促进科研和教育的发展。公司期望通过这样的机器人,为智能机器人时代的到来提供学习、交流和发展的机会。
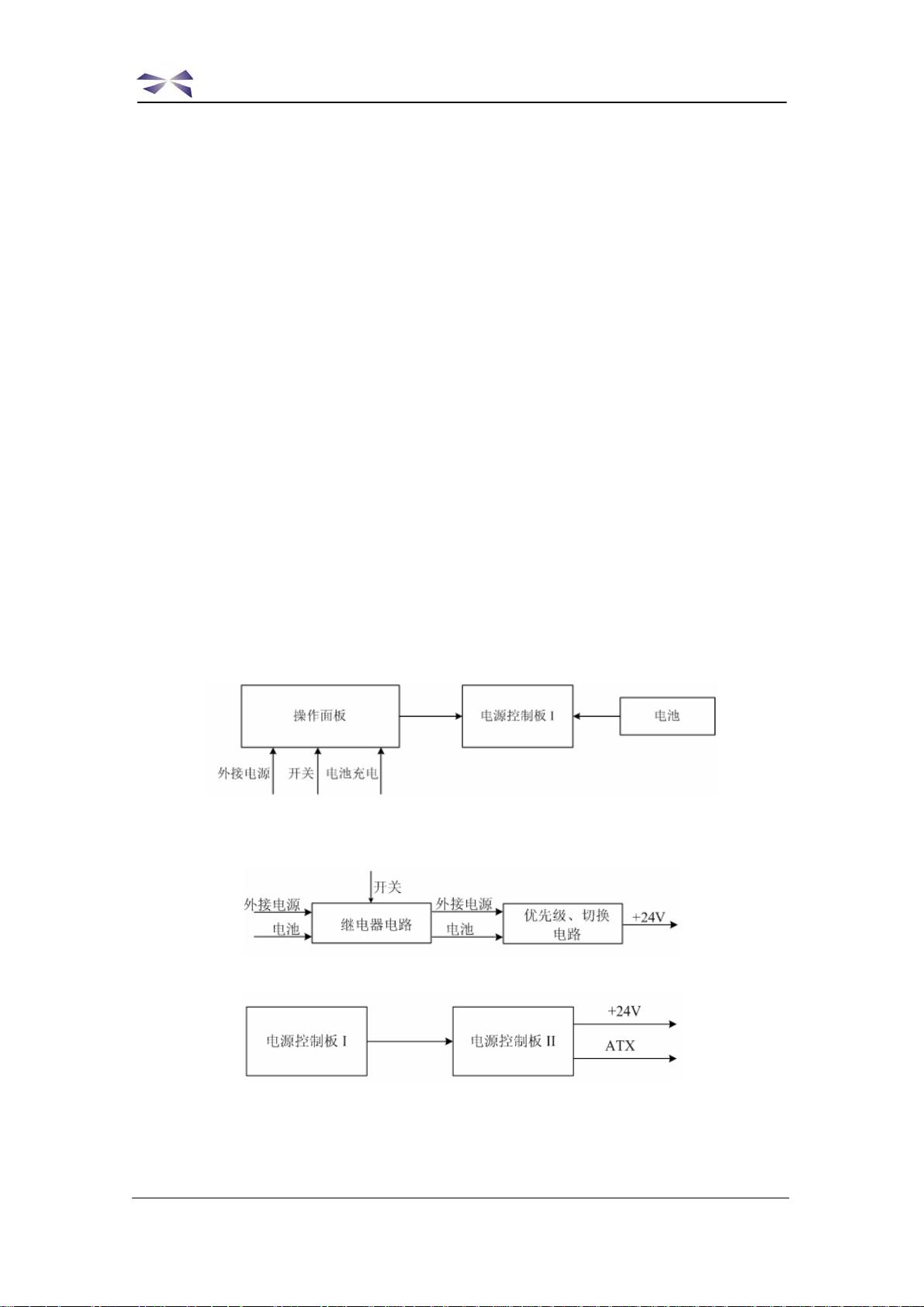
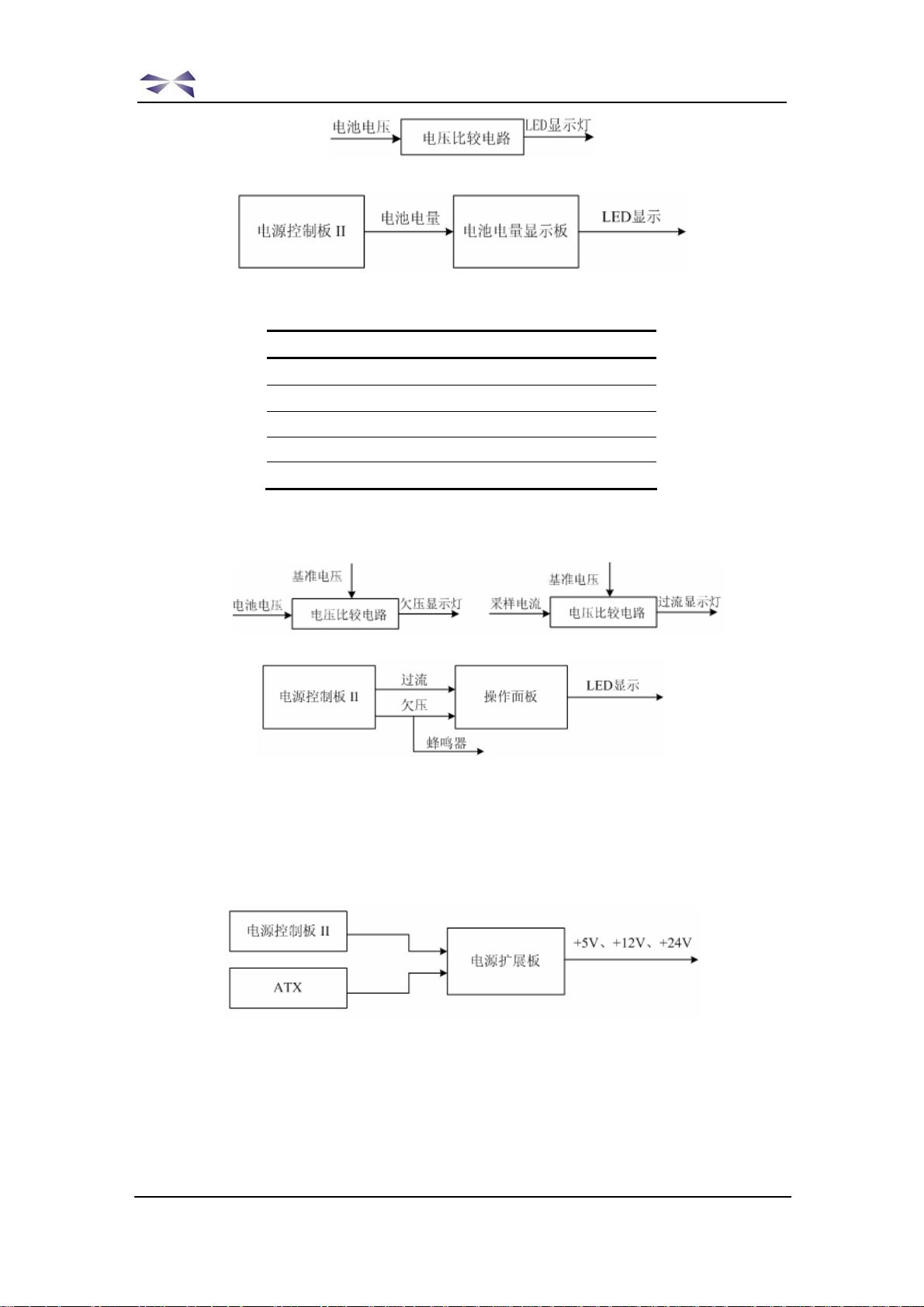
MT-OR机器人具有三层模块化结构:信息传感与交互层、信息处理与规划层、信息执行与能源层。它重35Kg,采用24V,10AH的动力锂电池,充满电需要5小时,可连续运行3小时。电源控制系统具备多种保护功能,如反接保护、过流保护和欠压保护,并有电量显示。
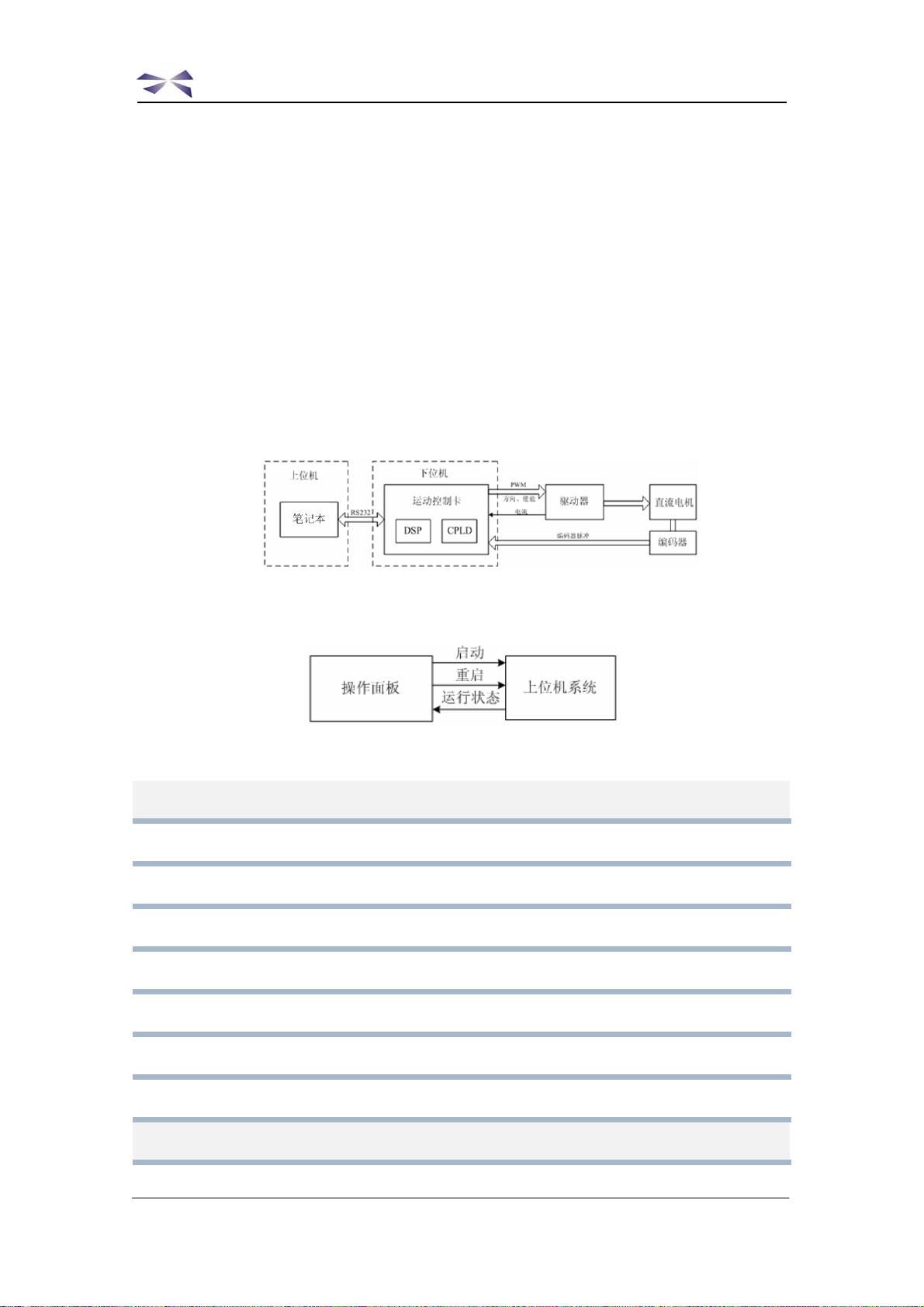
机器人的运动特性由三个24V, 150W的直流有刷电机驱动,每个电机配备240W的电机驱动器,具有过流和过热保护。运动控制卡基于专用的高速DSP和CPLD,支持模拟量和PWM控制,采用抗干扰能力强的CAN总线进行通信。机器人的执行机构为全向轮结构,最大速度可达2.5m/s,能承载10kg的推力,适应室内各种地面环境。
电子和传感器部分包括三个声纳传感器(测量范围20cm-7m),三个PSD(位置敏感探测器,范围8mm-80mm)用于精确定位,以及500线编码器。计算机部分搭载了Intel CPU的计算平台,确保高效的数据处理。
MT-OR机器人开发指南可能涉及如何编程控制机器人运动、传感器数据的获取与处理、以及如何利用提供的API和工具进行应用开发。这为用户提供了丰富的实践和学习内容,无论是科研人员还是学生,都能从中受益,提升对智能机器人技术的理解和应用能力。
上海英集斯自动化技术有限公司
http://www.ingenious.cn
16
第三章: MT-OR 机器人电子系统
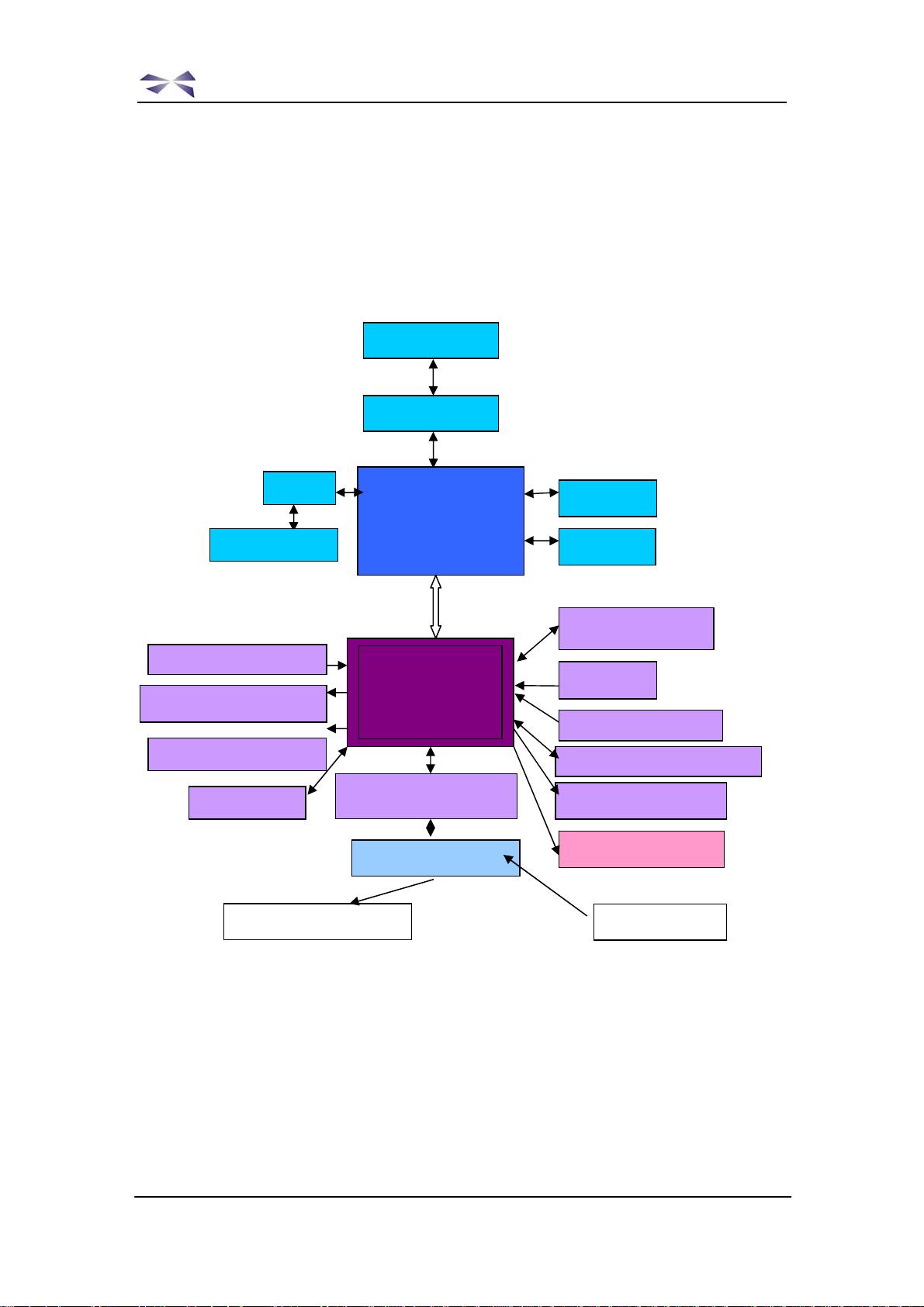
3.1 MT-OR 机器人系统架构设计
MT-OR采用驱动器、运动控制卡、笔记本结构
笔记本
USB2.0
RS232串口
语音接口
DSP运动控制卡
(下位机)
PCMCIA图像采
三轴位置、速度闭环控制
16
路数字量输
入(DI)
16路数字量输出(DO)
16路超声传感器控制
16路A/D
8路D/A输出(0~5V)
电流环240W驱动器
150W 直流电机
1路PWM输出
可扩展6路开环控制
CAN2.0接口
500线编码器
16路PSD传感器控制
参
数
及
用户算
法
程序存储
器
54M 无线网卡
全景摄像机
剩余109页未读,继续阅读
2024-08-05 上传
2021-10-14 上传
2021-09-29 上传
2019-10-19 上传

卷积神经网络
- 粉丝: 364
- 资源: 8440
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
