u-blox M8高精度定位模块接收器详解与V15协议规格
需积分: 19 183 浏览量
更新于2024-07-16
收藏 3.41MB PDF 举报
u-blox M8系列接收器说明文档是专为高性能定位模块u-blox M8设计的技术文档,其主要关注点在于描述该模块的固件特性、规格和配置。这份文档旨在为用户和开发者提供全面的理解,涵盖了u-blox M8接收器的功能概述以及概念细节。
文档的重点在于"Receiver Description Including Protocol Specification V15"部分,它详尽介绍了u-blox M8所支持的协议——NMEA(National Marine Electronics Association)和UBX(u-blox Binary eXtended)版本15。NMEA是一种广泛应用于全球定位系统(GPS)设备的标准通信协议,而UBX则是u-blox自家开发的可扩展协议,用于增强数据交换的灵活性和性能。
在接收器描述部分,用户可以了解到模块的硬件架构、接口选项、定位算法、信号处理能力,以及与外部设备如GPS天线、传感器和其他通信模块的集成方式。此外,文档还会讨论模块的工作模式,包括定位、导航、时间同步以及可能的附加服务,如差分GPS(DGPS)、GLONASS、Galileo或QZSS等全球卫星导航系统的集成。
协议规范部分则深入解析了V15版本中的具体细节,包括数据帧结构、命令和响应格式、错误检测和校正机制,以及如何通过这些协议实现位置信息、速度、高度、时间戳等关键数据的传输。此外,它还包含了关于版本更新、兼容性、安全性和认证信息的重要指导。
值得注意的是,本文档是早期生产信息版本,这意味着其内容可能会随着产品的进一步发展有所调整。u-blox公司提醒用户,所有信息受其条款和条件约束,用户在使用时需接受这些条款。u-blox不保证文档内容的准确性或完整性,并保留随时更改规格和产品描述的权利,且无需提前通知。
总结来说,阅读u-blox M8系列接收器说明文档,用户和开发者可以获取到关于高性能定位模块的关键技术信息,包括其功能特性、通信协议以及如何高效地利用和配置该模块,以满足各种应用的需求。在实际项目中,这份文档是必不可少的参考资料。
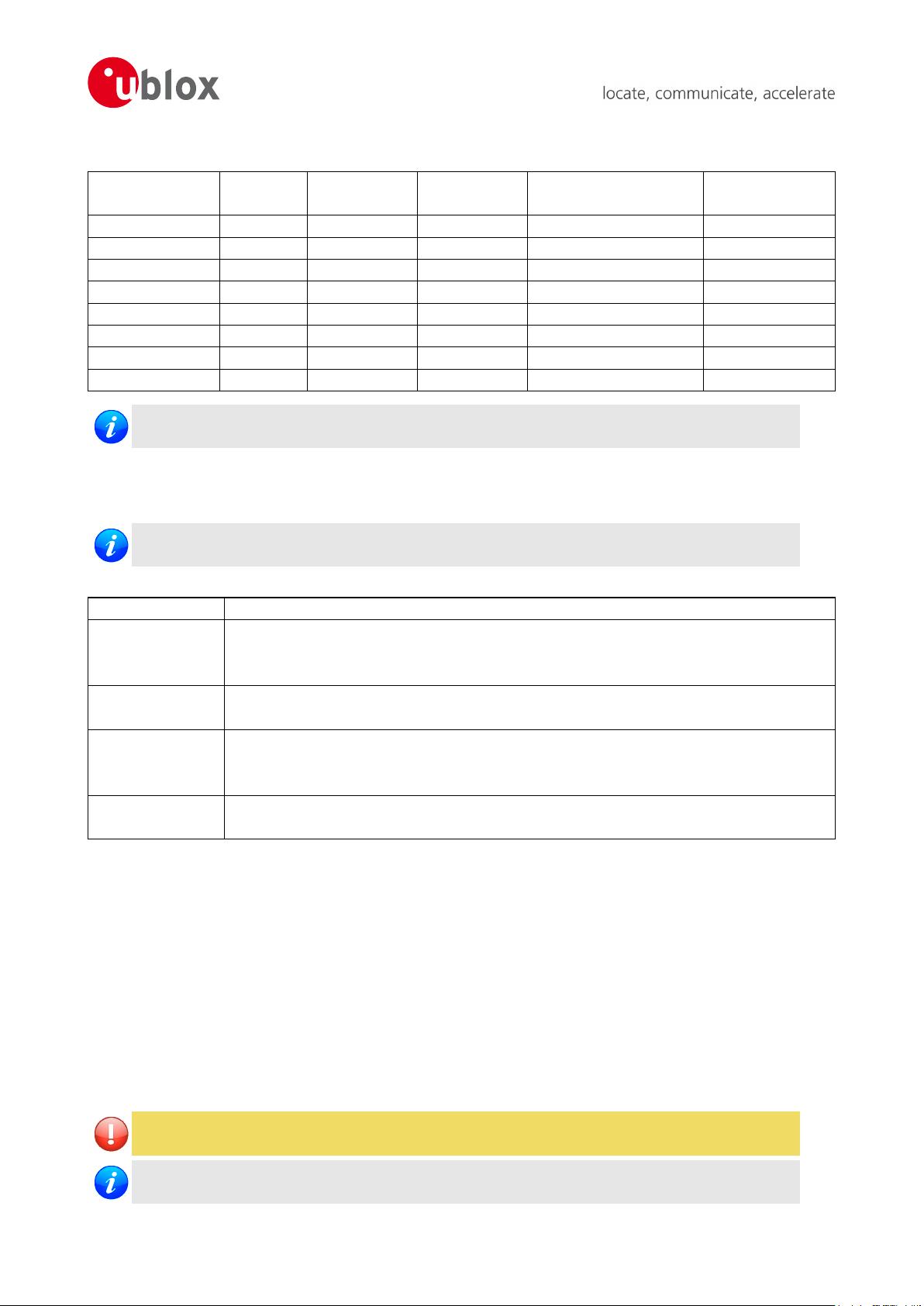
Dynamic Platform Model Details
Platform Max Altitude
[m]
MAX Horizontal
Velocity [m/s]
MAX Vertical
Velocity [m/s]
Sanity check type Max Position Deviation
Portable 12000 310 50 Altitude and Velocity Medium
Stationary 9000 10 6 Altitude and Velocity Small
Pedestrian 9000 30 20 Altitude and Velocity Small
Automotive 6000 100 15 Altitude and Velocity Medium
At sea 500 25 5 Altitude and Velocity Medium
Airborne <1g 50000 100 100 Altitude Large
Airborne <2g 50000 250 100 Altitude Large
Airborne <4g 50000 500 100 Altitude Large
Dynamic platforms designed for high acceleration systems (e.g. airborne <2g) can result in a higher
standard deviation in the reported position.
2.2 Navigation Input Filters
The navigation input filters in CFG-NAV5 mask the input data of the navigation engine.
These settings are already optimized. Do not change any parameters unless advised by u-blox
support engineers.
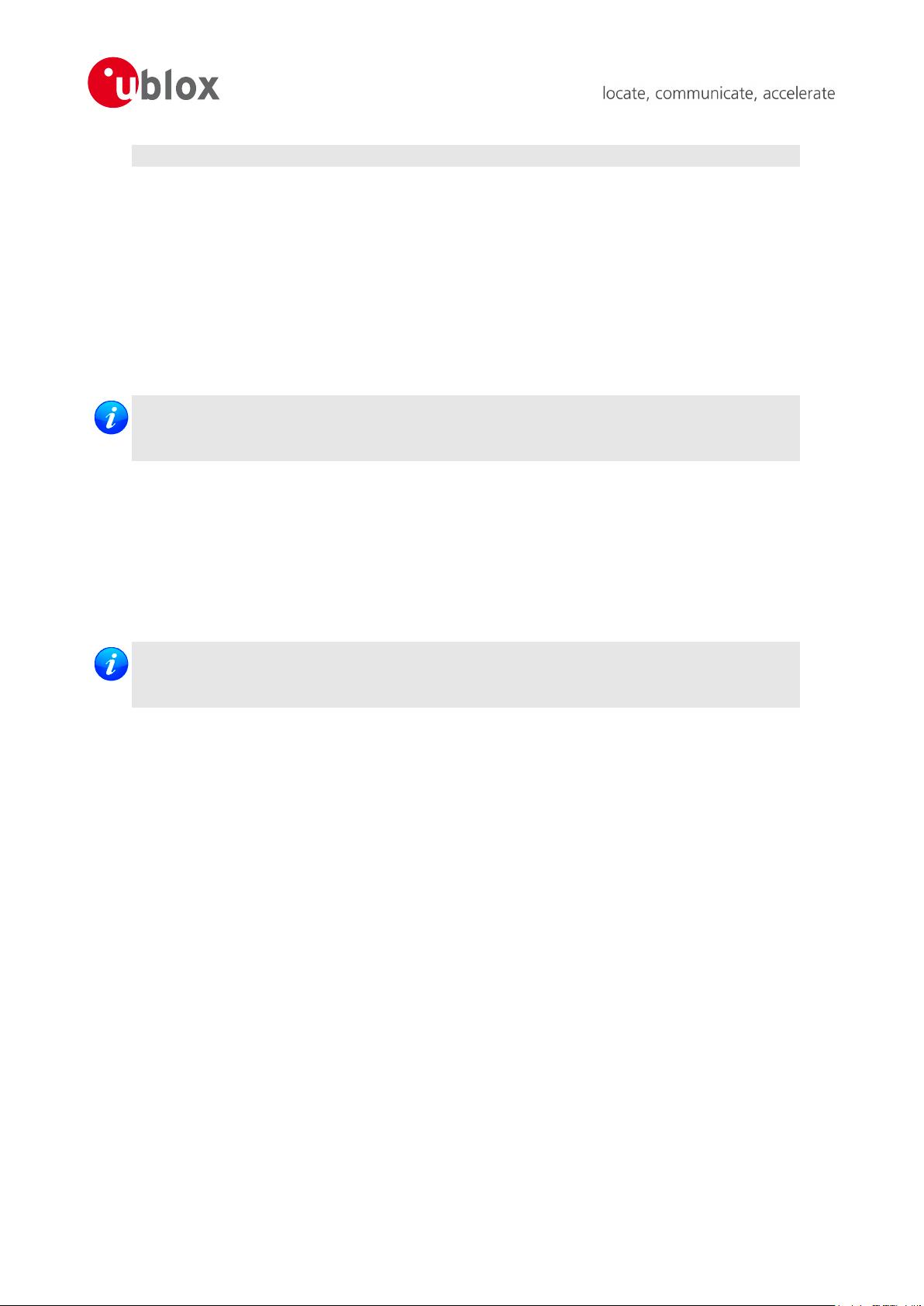
Navigation Input Filter parameters
Parameter Description
fixMode By default, the receiver calculates a 3D position fix if possible but reverts to 2D position if
necessary (Auto 2D/3D). The receiver can be forced to only calculate 2D (2D only) or 3D (
3D only) positions.
fixedAlt and
fixedAltVar
The fixed altitude is used if fixMode is set to 2D only. A variance greater than zero must
also be supplied.
minElev Minimum elevation of a satellite above the horizon in order to be used in the navigation
solution. Low elevation satellites may provide degraded accuracy, due to the long signal
path through the atmosphere.
cnoThreshNumSVs
and cnoThresh
A navigation solution will only be attempted if there are at least the given number of SVs
with signals at least as strong as the given threshold.
See also comments in section Degraded Navigation below.
2.3 Navigation Output Filters
The result of a navigation solution is initially classified by the fix type (as detailed in the fixType field of
UBX-NAV-PVT message). This distinguishes between failures to obtain a fix at all ("No Fix") and cases where a
fix has been achieved, which are further subdivided into specific types of fixes (e.g. 2D, 3D, dead reckoning).
Where a fix has been achieved, a check is made to determine whether the fix should be classified as valid or
not. A fix is only valid if it passes the navigation output filters as defined in UBX-CFG-NAV5. In particular, both
PDOP and accuracy values must lie below the respective limits.
Valid fixes are marked using the valid flag in certain NMEA messages (see Position Fix Flags in NMEA)
and the gnssFixOK flag in UBX-NAV-PVT message.
Important: Users are recommended to check the gnssFixOK flag in the UBX-NAV-PVT or the
NMEA valid flag. Fixes not marked valid should not normally be used.
The UBX-NAV-SOL and UBX-NAV-STATUS messages also report whether a fix is valid in their
gpsFixOK and GPSfixOk flags. These messages have only been retained for backwards compatibility
UBX-13003221-R03 Early Production Information Page 2 of 234
剩余247页未读,继续阅读
2020-05-12 上传
2022-09-21 上传
2023-07-31 上传
2022-10-13 上传
2021-05-20 上传
2016-06-03 上传
点击了解资源详情

say265
- 粉丝: 2
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python库 | vivisect-0.2.0-py2-none-any.whl
- Gauss_Seidel_Method:使用高斯赛德尔方法求解对角占优矩阵-matlab开发
- kube1.22.1.tar.gz
- Git简介
- Notifier-Bot
- Binge-Finder-Debugging-Lab-chicago-web-021720
- 交互系统的术语和替代:Master Final Project
- Gamla artiklar-crx插件
- practice
- 编译器前端-C
- 钢结构施工组织设计-土建结构工程施工组组织设计
- Datastructure-using-Javascript
- 项目31
- Gazete Kolay-crx插件
- upptime:Upptime(https:upptime.js.org)
- 时尚线条背景下载PPT模板
